-
-
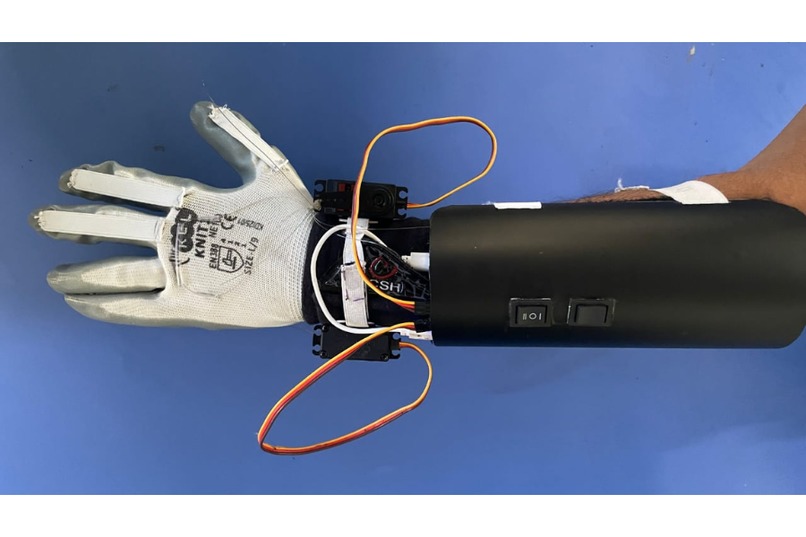
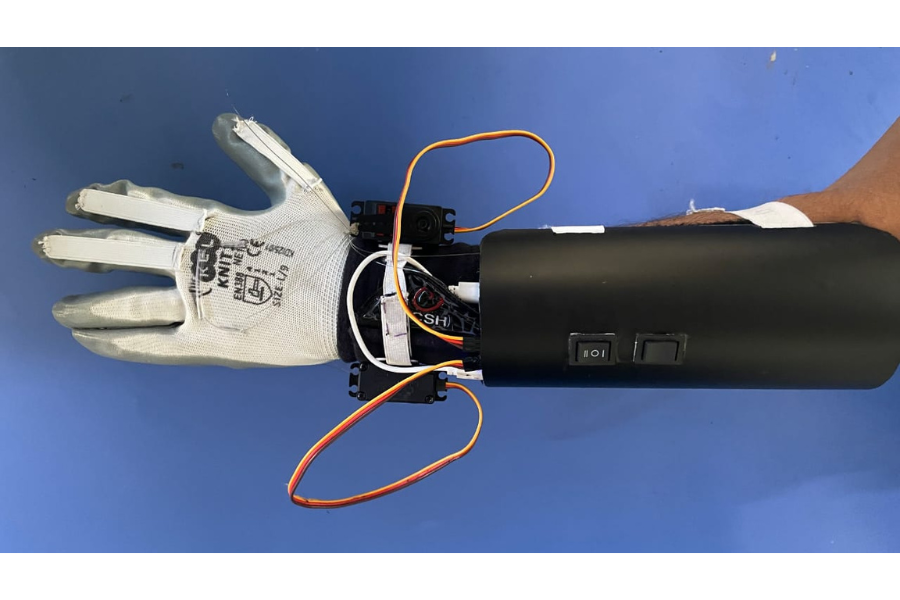
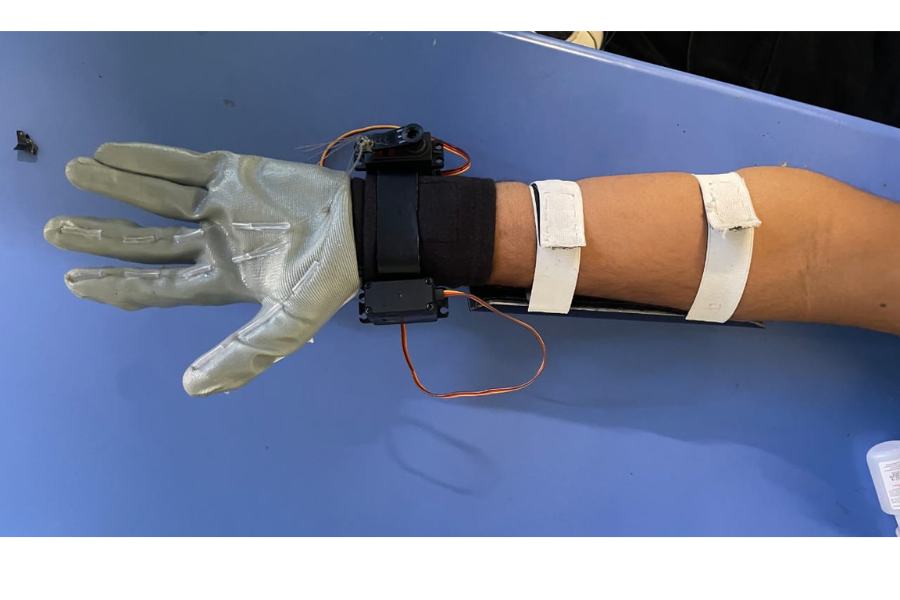
Dextra Prototype – Top View
-
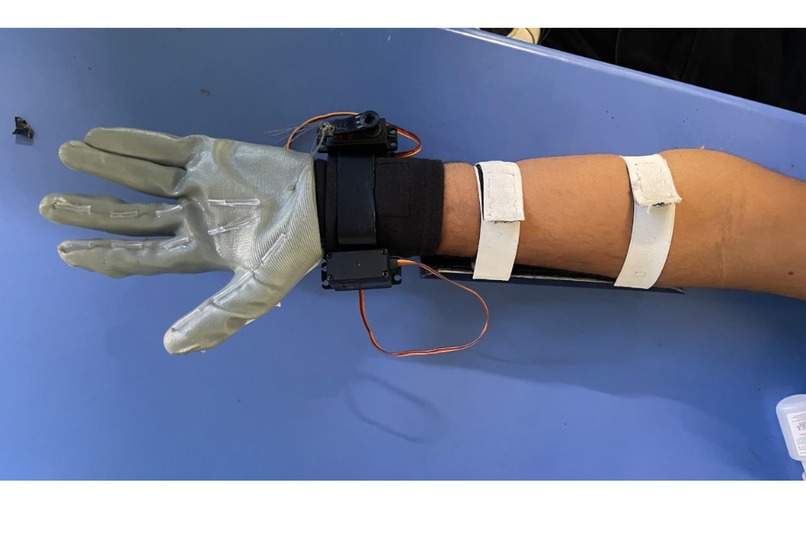
Dextra Wearable Orthosis – Functional Fit
-
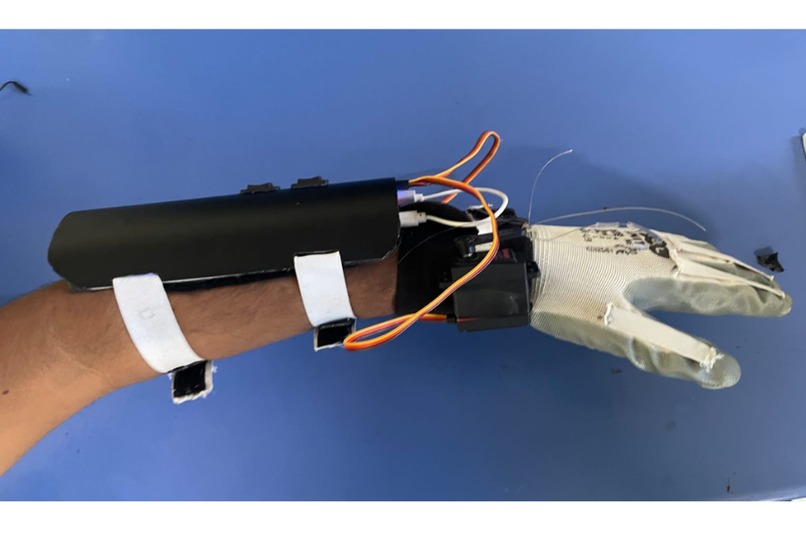
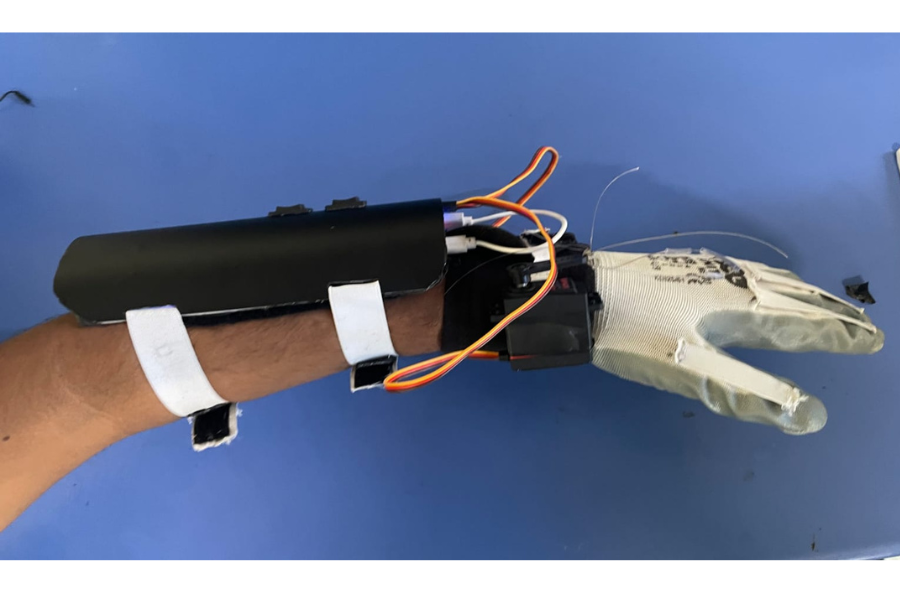
Side View of Dextra Orthosis System
Inspiration
Millions of people suffering from stroke, spinal cord injuries, wrist drop, and nerve damage lose the ability to perform simple daily tasks such as holding objects, writing, or eating independently. During our hospital visits and discussions with neurologists and physiotherapists, we realized that most available rehabilitation devices are either too expensive or only provide passive support without active movement assistance.
This inspired us to develop Dextra, an affordable and wearable robotic wrist-hand orthosis focused on restoring functional independence through active assistive rehabilitation.
What it does
Dextra is a smart wearable robotic orthosis that assists wrist and finger movement for patients with upper-limb impairments. The system uses servo-driven tendon actuation to mimic natural hand movement and provide controlled gripping and release actions.
The device supports:
- Wrist articulation and stabilization
- Finger flexion and extension
- Functional 3-jaw chuck grip
- Switch-based control
- App-based control
- Future voice and EMG integration
The orthosis is lightweight, portable, affordable, and designed for both rehabilitation and daily assistive use.
How we built it
The system was developed using an ESP32 microcontroller integrated with high-torque servo motors such as MG996R and TD-8135MG. A tendon-pulley mechanism using durable threads was designed to replicate artificial tendon movement for finger articulation.
The glove structure was developed using comfortable nitrile-coated knitted gloves to ensure flexibility, grip, and long-duration usability.
The complete workflow includes:
- User input through switch/app control
- Signal processing using ESP32
- Servo motor actuation
- Tendon movement for finger and wrist articulation
- Assisted gripping and release movement
We also analyzed grip-force requirements, rehabilitation ergonomics, cost feasibility, and market accessibility during development.
Challenges we ran into
One of the biggest challenges was balancing affordability with effective rehabilitation performance. Designing a lightweight wearable system capable of generating sufficient gripping force while remaining comfortable for patients required multiple iterations.
Another challenge was achieving smooth tendon-driven movement and maintaining wrist stability during grasping actions. We also focused on reducing overall system complexity so the device could remain easy to use for patients and therapists.
Accomplishments that we're proud of
- Selected for the Smart India Hackathon 2025 Grand Finale
- Conducted hospital visits and professional validation discussions
- Developed a functional low-cost assistive orthosis concept
- Designed an active rehabilitation system instead of passive support
- Created scalable architecture for future EMG and smart rehabilitation integration
What we learned
Through this project, we gained practical experience in:
- Wearable robotics
- Embedded systems
- Biomechanics and rehabilitation engineering
- Servo-based actuation systems
- Product design and prototyping
- Healthcare-focused innovation
We also learned the importance of user-centered design and affordability in medical technology development.
What's next for Dextra
Future development goals include:
- EMG-based intention control
- AI-assisted rehabilitation tracking
- Mobile rehabilitation analytics
- IoT-enabled physiotherapy monitoring
- Improved ergonomic and modular design
- Clinical testing and real-world deployment
Our vision is to make advanced rehabilitation technology affordable and accessible for patients who need it the most.
Built With
- arduino
- bluetooth-control
- built-with:-esp32
- embedded-systems
- mobile-app-interface
- robotics
- servo-motors-(mg996r-&-td-8135mg)
- tendon-pulley-mechanism
- voice-control-system
- wearable




Log in or sign up for Devpost to join the conversation.