-
-

This project is at lab level testing, And this is our prototype for elbow
-
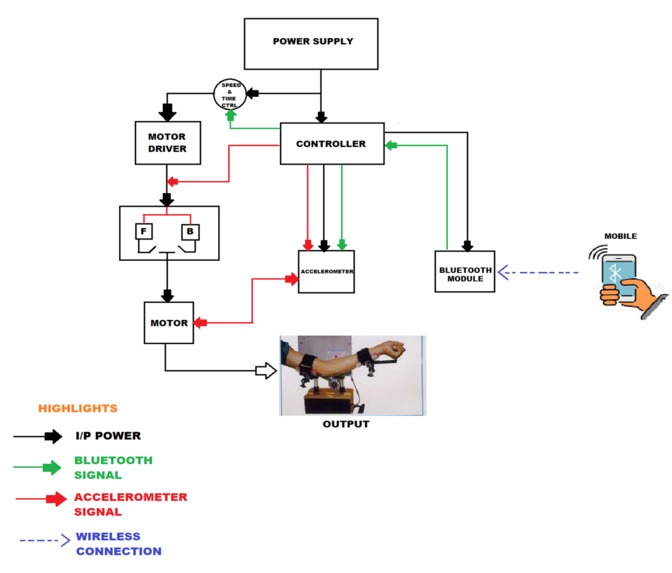
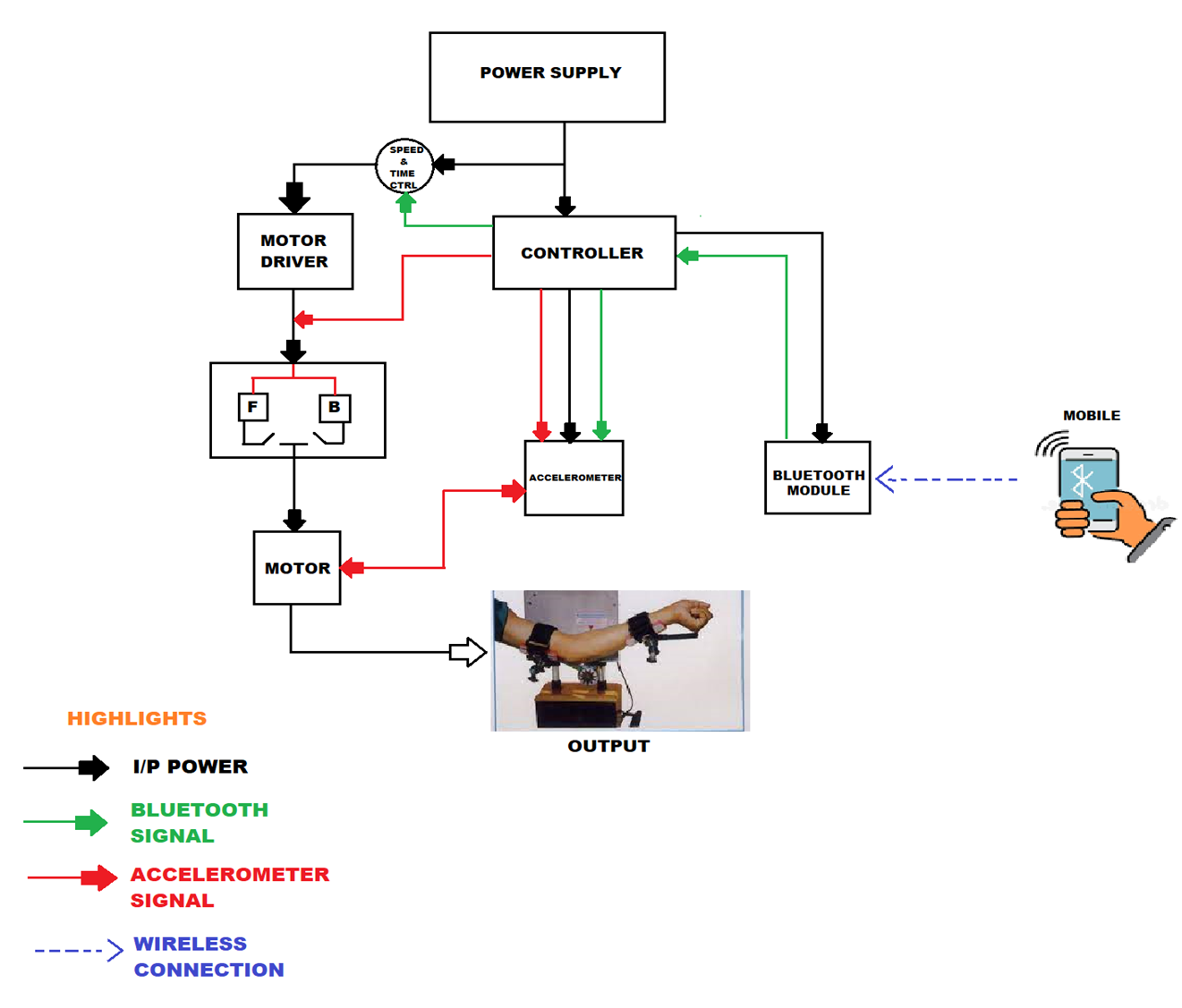
Functional block diagram

Inspiration
- India with population of 1.37 billion has 0.59 % of physiotherapist but the patients who required treatment are more. Most of their services are available at cities and urban dwellings they are yet to reach the nook and corner of this vast land.
- Per session required almost 30min but due to more patients the therapist can’t attend all patients and the average cost for per session Rs: 300 to 1,500.
- During the physical session patients will resist sometime due to pain which affect the treatment, and cause swelling ,it makes more time to heal. So the patients need to attend more session until they recover which also increase cost of treatment.
- So we thought to create a machine which helps the therapist to attend more patients at a time and provides pain free treatment for patients to recover.
- When we started our research we came to know that there is CPM device which is available for Knee and ankles , and CPM for shoulder, joints, elbow is also available but they are designed for only single and individual operation (Ex ; Elbow CPM machine provide only elbow moments ) , And the cost of each machine is from Rs; 60,000 to 5 lakhs . So we planned to design a cost effective CPM machine which provide moments for whole upper limb .
What it does
- CPM (Continuous Passive Motion)
- It is a motorized device gently bends the joint back and forth to a set number of degrees, and the amount of movement and speed can be adjusted by the user (physiotherapist and patients).
- In this project we are using ATmage2560 microcontroller and accelerometer for controlling speed and angle
- Angle is set through the mobile application (App). And motor is controlled by the motor driver
- The reference angle is noted at the position where the patients feels pain.
- The reference angle is set as the initial starting angle for the motor which the Microcontroller start from count 0 to reference angle
- And at time when motor reaches the reference angle. The PWM generates the pulse to motor driver and the polarity of motor is changed
- And this process happens like a loop by repeating again and again until it completes the cycles of time period or count which has instructed by the user.
How we built it
- The frame works of the device is made of metal and for placing the hand we using foam rexine sheet. All joints are motorized , which each motor perform separate movements and motion for hand joints.
- ATMEGA328P microcontroller which acts as the brain of the circuit. A accelerometer is connected to the microcontroller for real time control of speed and Angle. The reference values for CPM device is setting using mobile phones connect through Bluetooth by mapping values of angle, speed , position, time period and number of counts can be changed using the application which has installed in mobile phone.
- The microcontroller is connected to the H-Bridge Motor drivers. Motor driver is connected to motor and changes the polarity .
Challenges we ran into
- At first we used potentiometer(nob) to set the reference angle, speed, position, time and count but we faced lack of accuracy , And due to more physical components( potentiometer , control board, lcd display, ADCs) for cross cutting and controlling the machine , the cost also increases .So we decide to move on wireless controlling method by mobile application through bluetooth and reduced more use of physical components.
Accomplishments that we're proud of
- Mobile interfacing through bluetooth.
- Accurate position and angle handling.
- Treatment for full upper limb by single machine .
- Pain free movements.
- Portable and easy to mount in walls and patients comfort place.
- Cost effective treatments
What we learned
- The CPM is the only solution in orthopedic treatment for the patients having fractured bones, frozen elbow and shoulder.
- The range of motion (ROM) of your arm or leg will increase.
- Increases blood flow to tissues will helps heal faster.
What's next for CPM DEVICE FOR ORTHOPEDIC TREATMENT OF HUMAN ARM
- For the next level decide to implement Artificial intelligence to the device , so that all health data about the patients are gathered from the unique patients id provided by the clinics or doctors . Pain position of patients arm is recognised by the muscle frequency during the movement ,and speed position, angle and time handling for treatment are decided by the machine itself by noticing the healing of the arm and CPM for both whole upper and lower limb with a single machine implemented with AI is the futuristic development .
Built With
- biomedical-device
- continuous-passive-motion
- framework
- microcontroller
- mobile-interfacing
- wireless-control



Log in or sign up for Devpost to join the conversation.