
Inspiration
We wanted to create a robot that could navigate natural disaster zones and sort through the rubble and locate any human life.
What it does
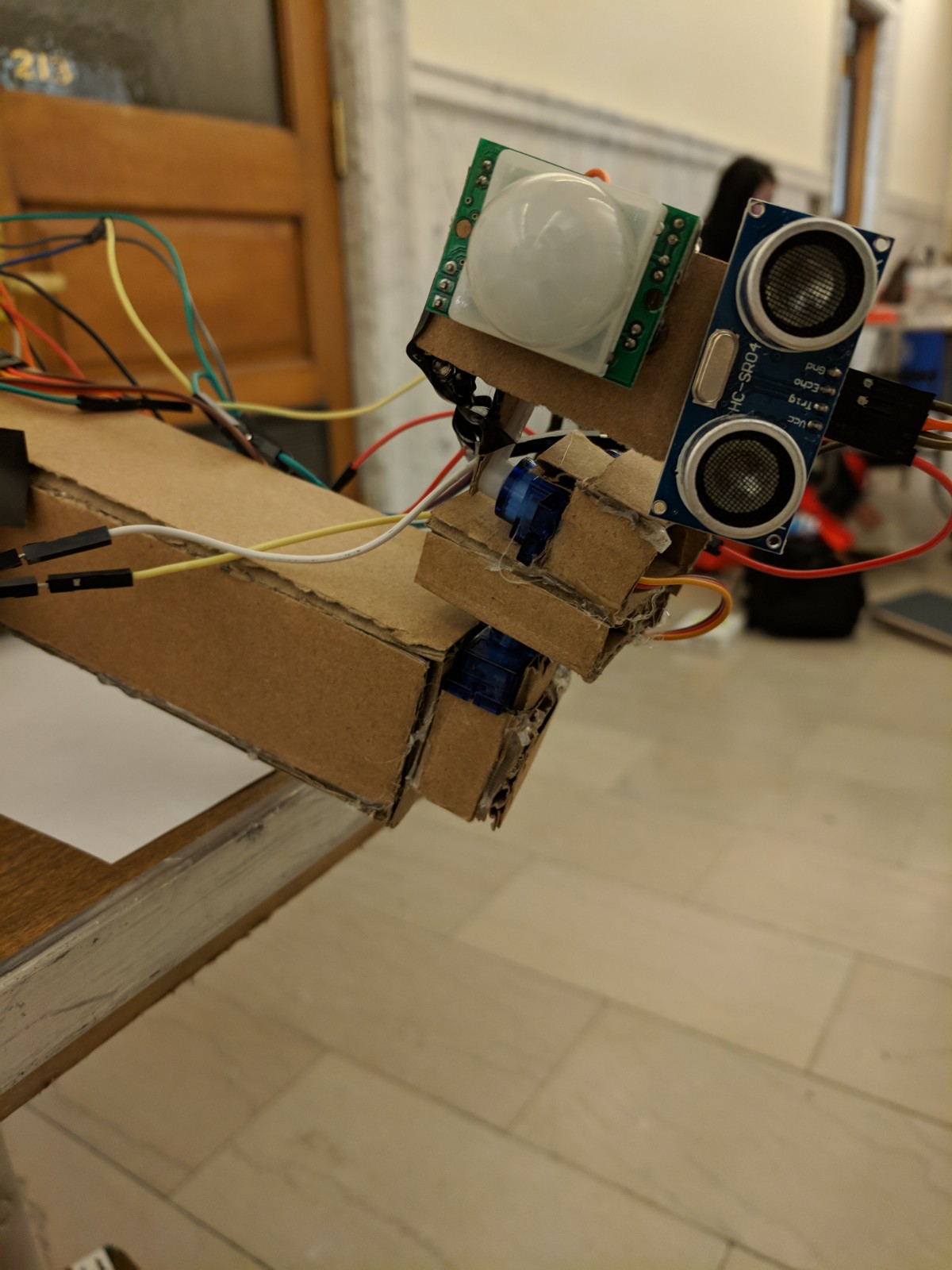
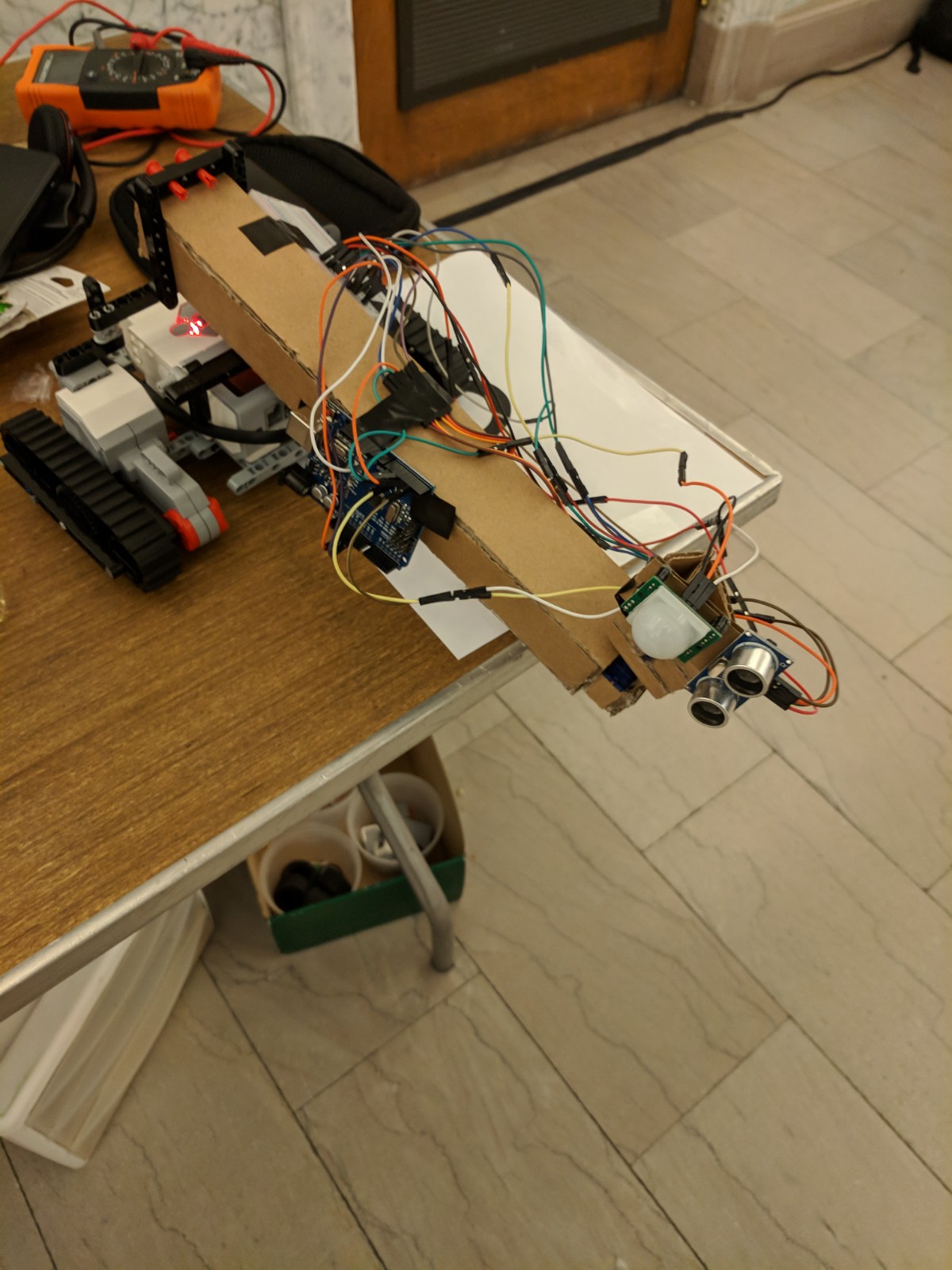
Our robot uses a passive infrared sensor to detect human heat in conjunction with an ultrasonic sensor which measures distance and helps accurately plot the shape of any room. It is controlled by a logitech joystick along with an ip camera from a remote location.
How we built it
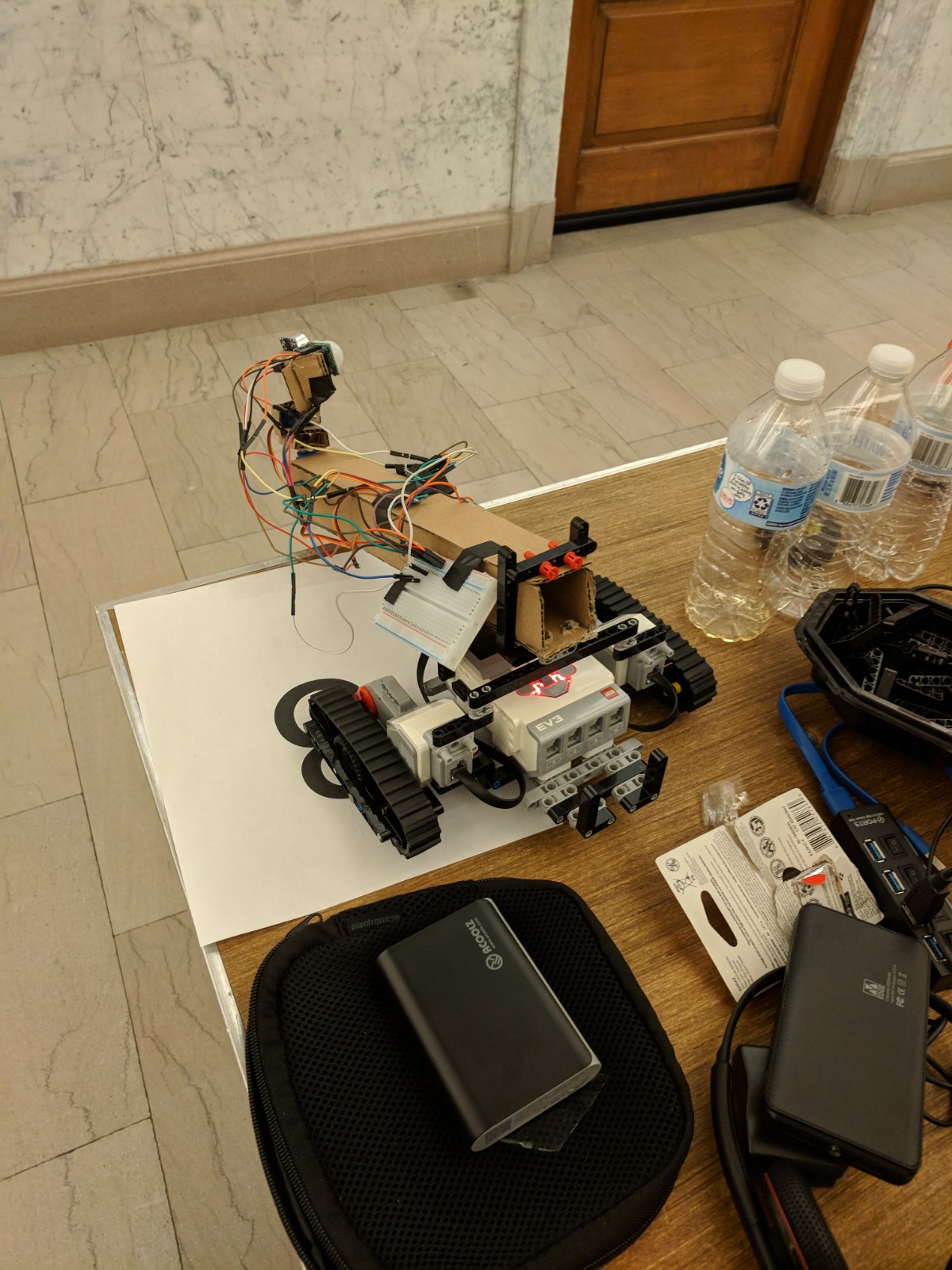
We built the base of the robot out of lego bricks in order to provide for a firm foundation that could handle the tremendous strain of the sensors. Then we used the ev3 brick to control two large servos that acted as the driving force behind our robot. We built an arm out of cardboard which was attached to the ev3 on one end and on the other end we attached the sensors along with a few small servos designed to rotate the sensors along the xy axis.
Challenges we ran into
Some of the challenges we ran into were making the ardunio sensors functional as is the case usually. For an example, the PIR Sensor that we had was faulty and after a few hours of tinkering around we finally came to this realization when we borrowed a PIR sensor from the hardware lab.
Accomplishments that we're proud of
Some accomplishments we are proud of is that fact that we were able to control the ev3 using a joystick as well as being able to use our phone as the "eyes" of the robot.
What we learned
Along the way, we learned how to use the PIR sensor as difficult as it may have been along with how to stream data from our phone's camera to a remote computer.
What's next for Detect&Save
What's next for Detect&Save is basically a lot of things. First of all, we need to get better sensors than the ones currently at our disposable since they are a serious limiting factor in terms of getting accurate and precise data. By upgrading the accuracy of our ultrasonic sensor for example we would be able to more successfully root out bad data points. Also, we need to acquire a very powerful motor than will be able to rotate the arm of the robot which contains all the sensors.


Log in or sign up for Devpost to join the conversation.