-
-
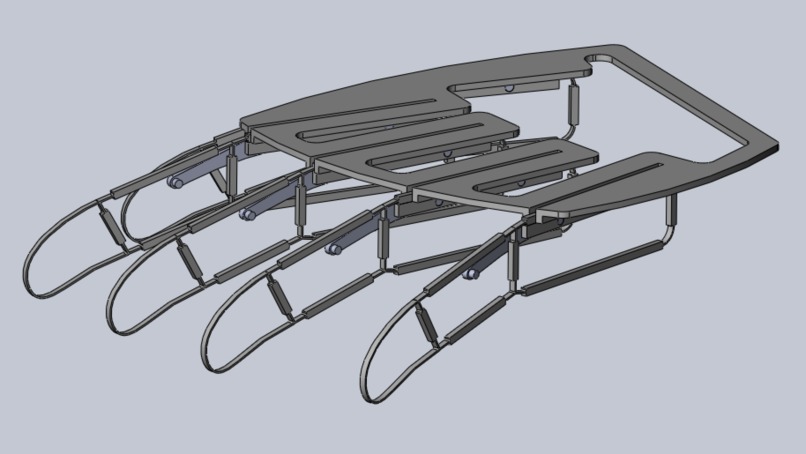
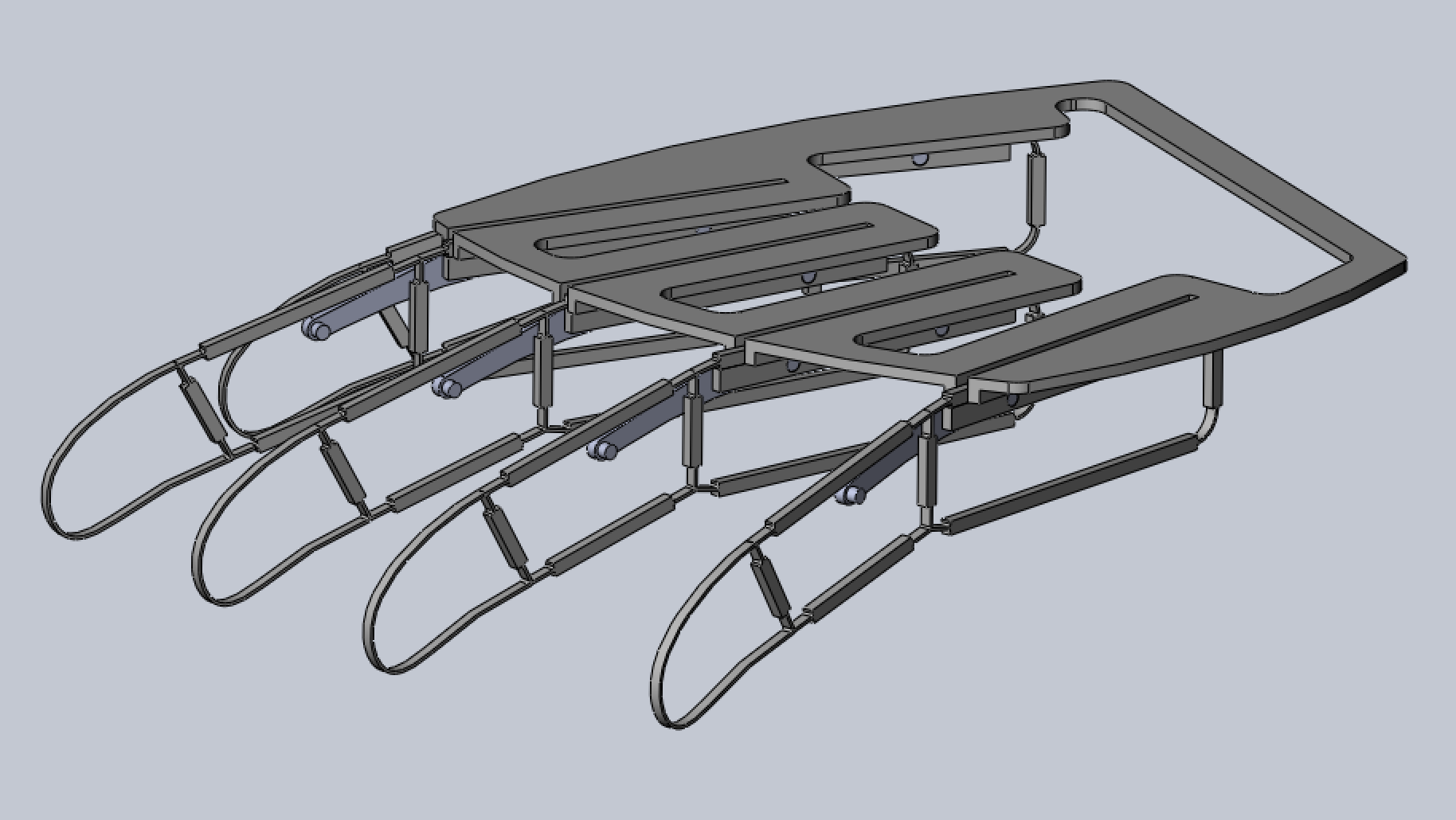
Complete Hand Model
-
-
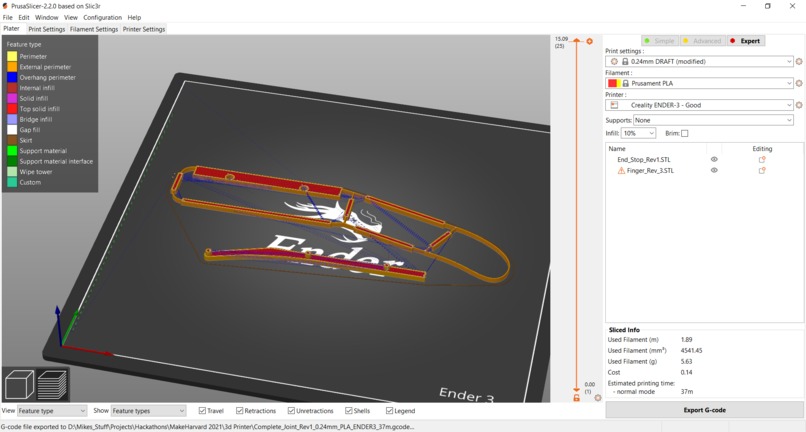
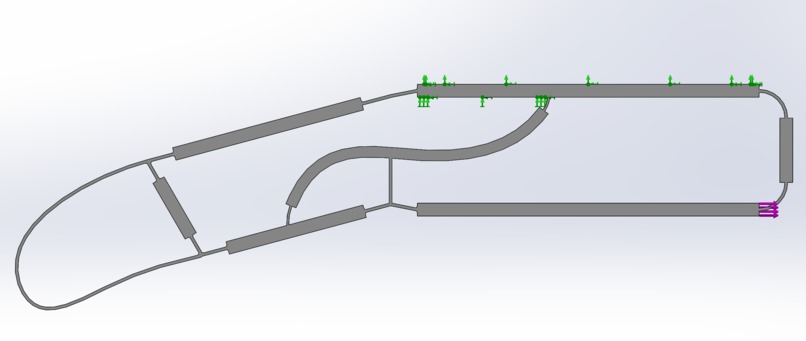
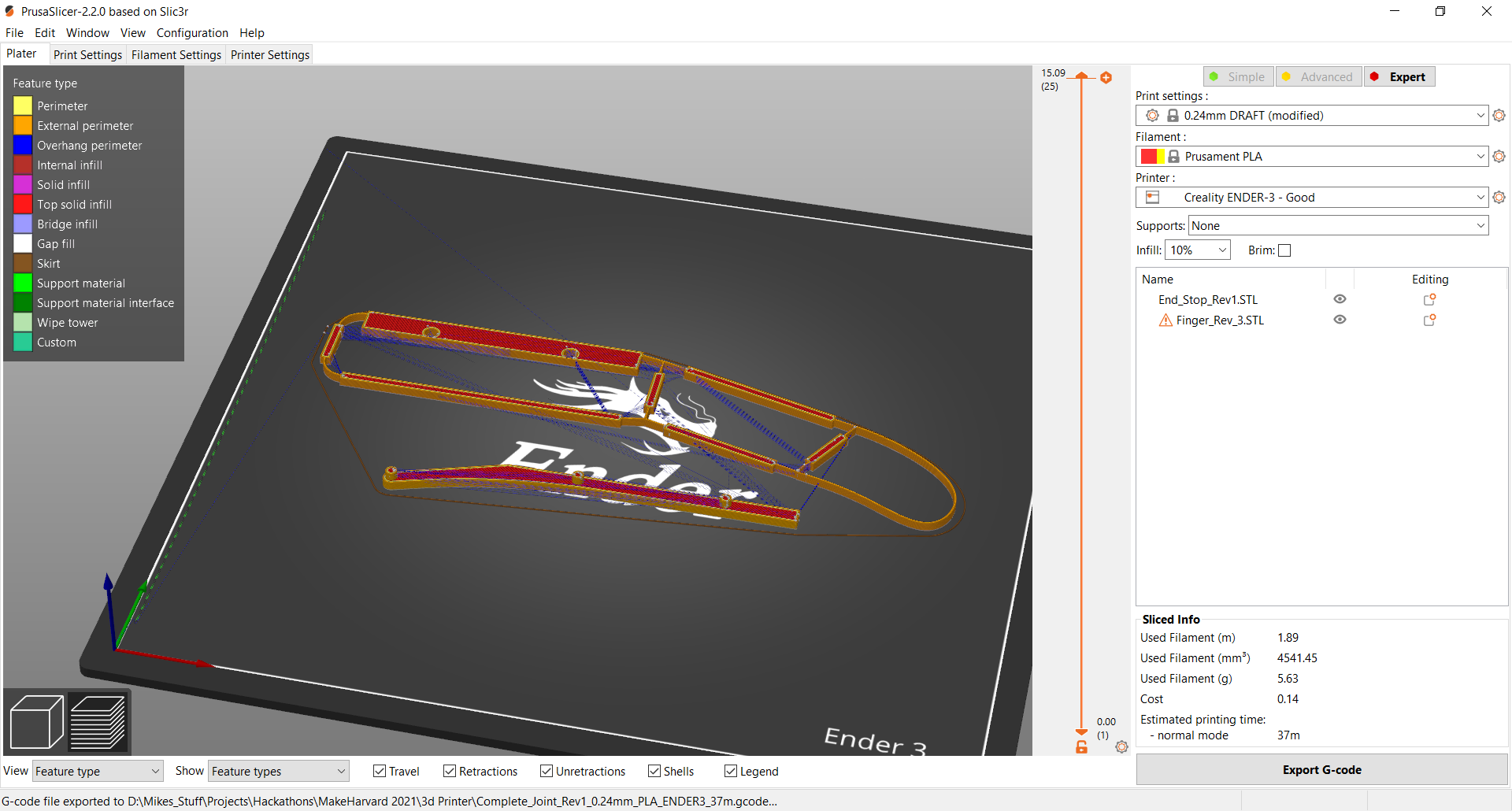
Slicing of A Design
-
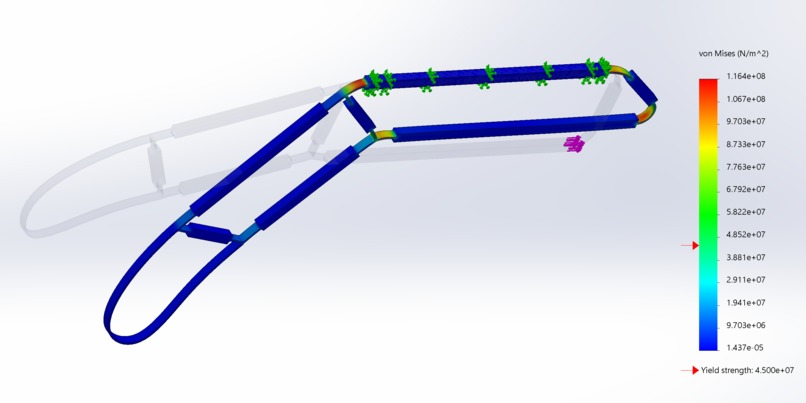
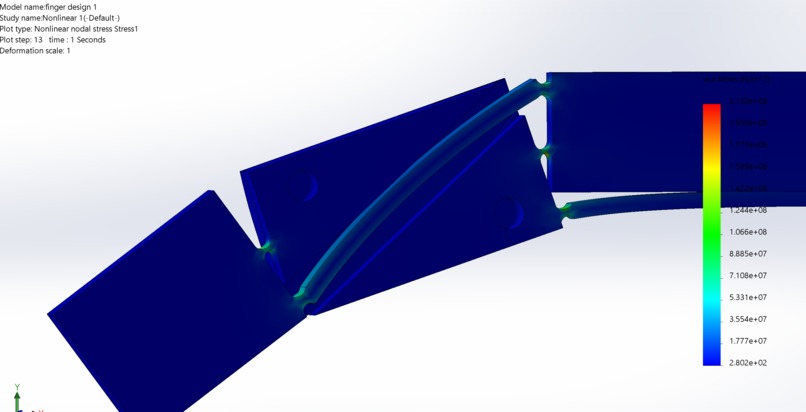
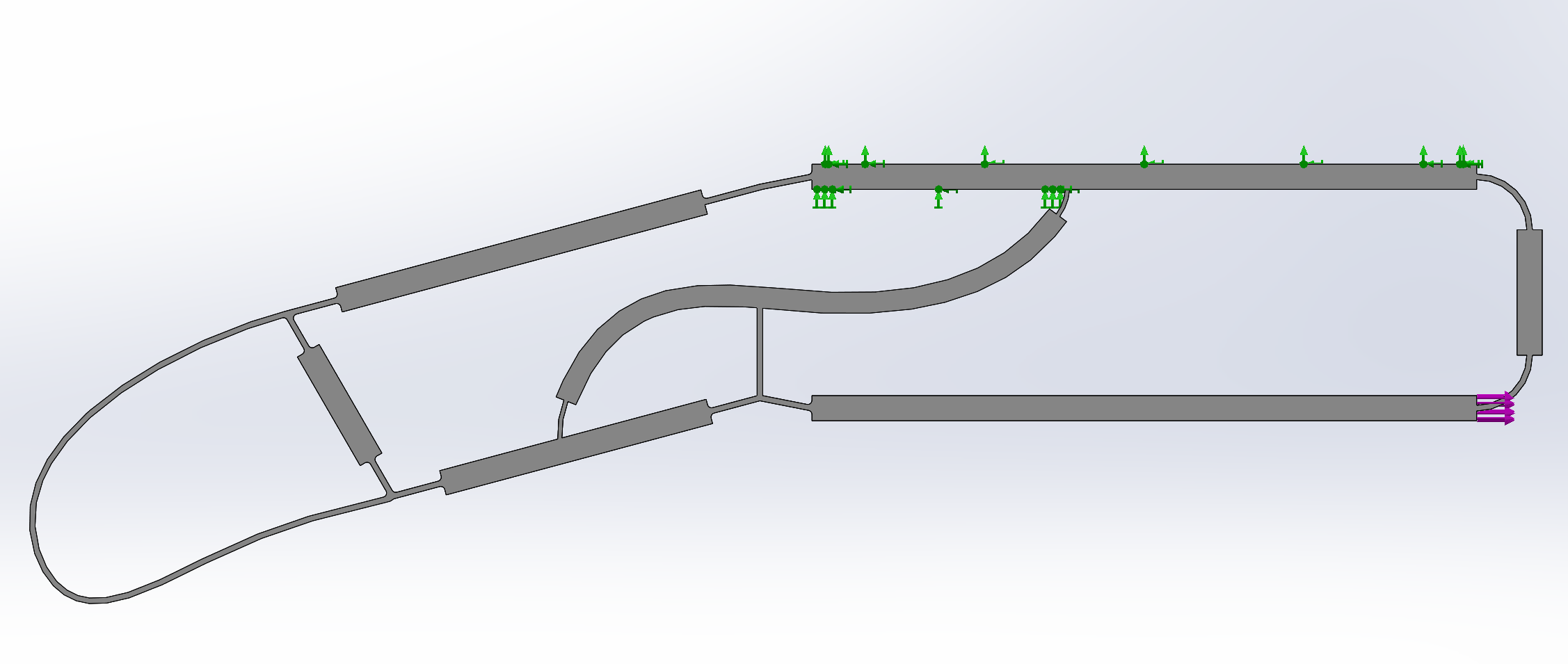
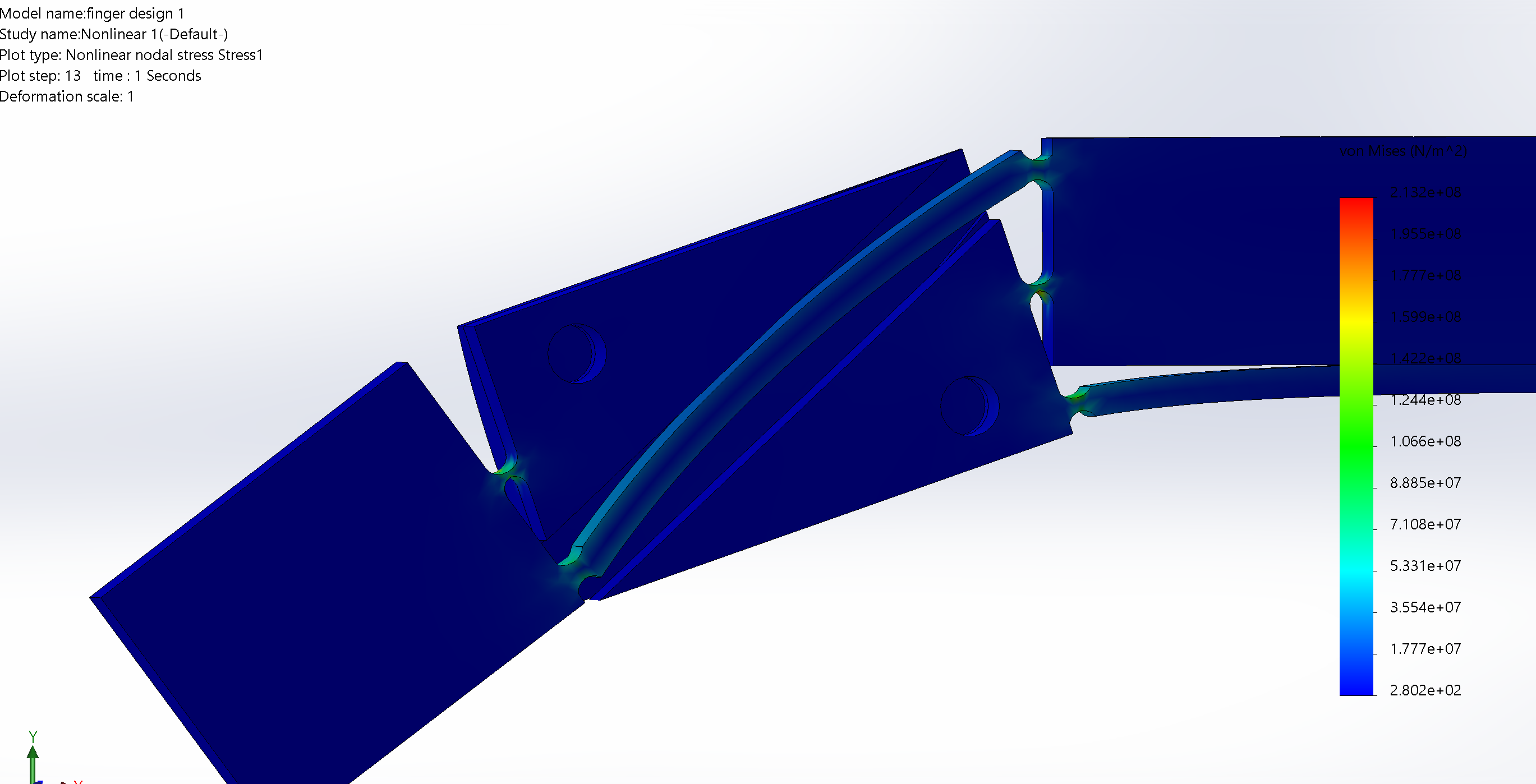
FEA of a Test Design
-
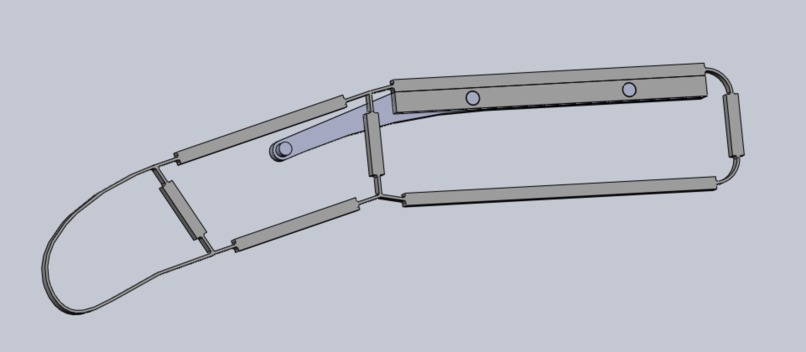
Another FEA of Possible Design
-
FEA of Possible design
-
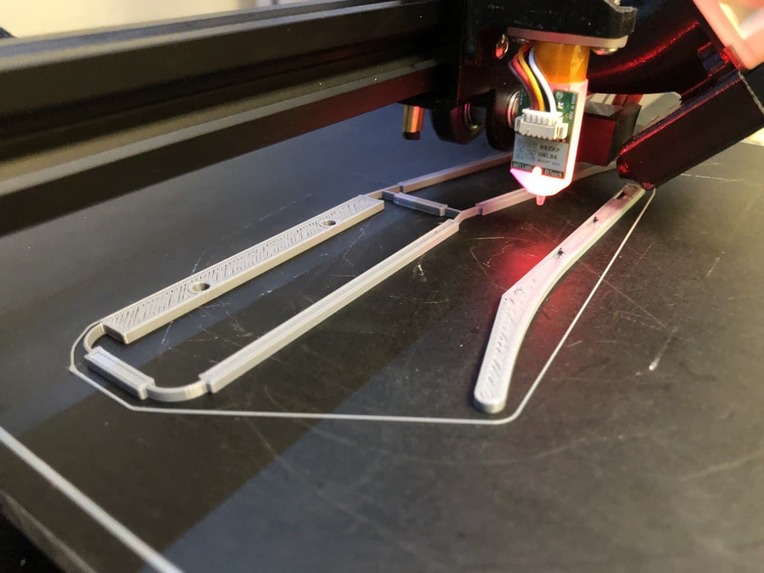
Final Design


Inspiration
Scott is a mechanical engineer who has been working on myoelectric prosthetic hand development and wanted to explore the usage of compliant mechanisms to create a simple, cost-effective solution for finger movements. Brian and Michael are electrical engineers with a passion for creation of novel designs with 3d printing and rapid prototyping techniques.
What It Does
The prosthetic finger utilizes compliant flexure joints culminating in a mechanism with naturalistic finger kinematics that has the benefits of: a reduced parts count (a "print-in-place" design), being light-weight and cost effectiveness -- make it more accessible and practical for the millions of amputees in low socioeconomic situations.
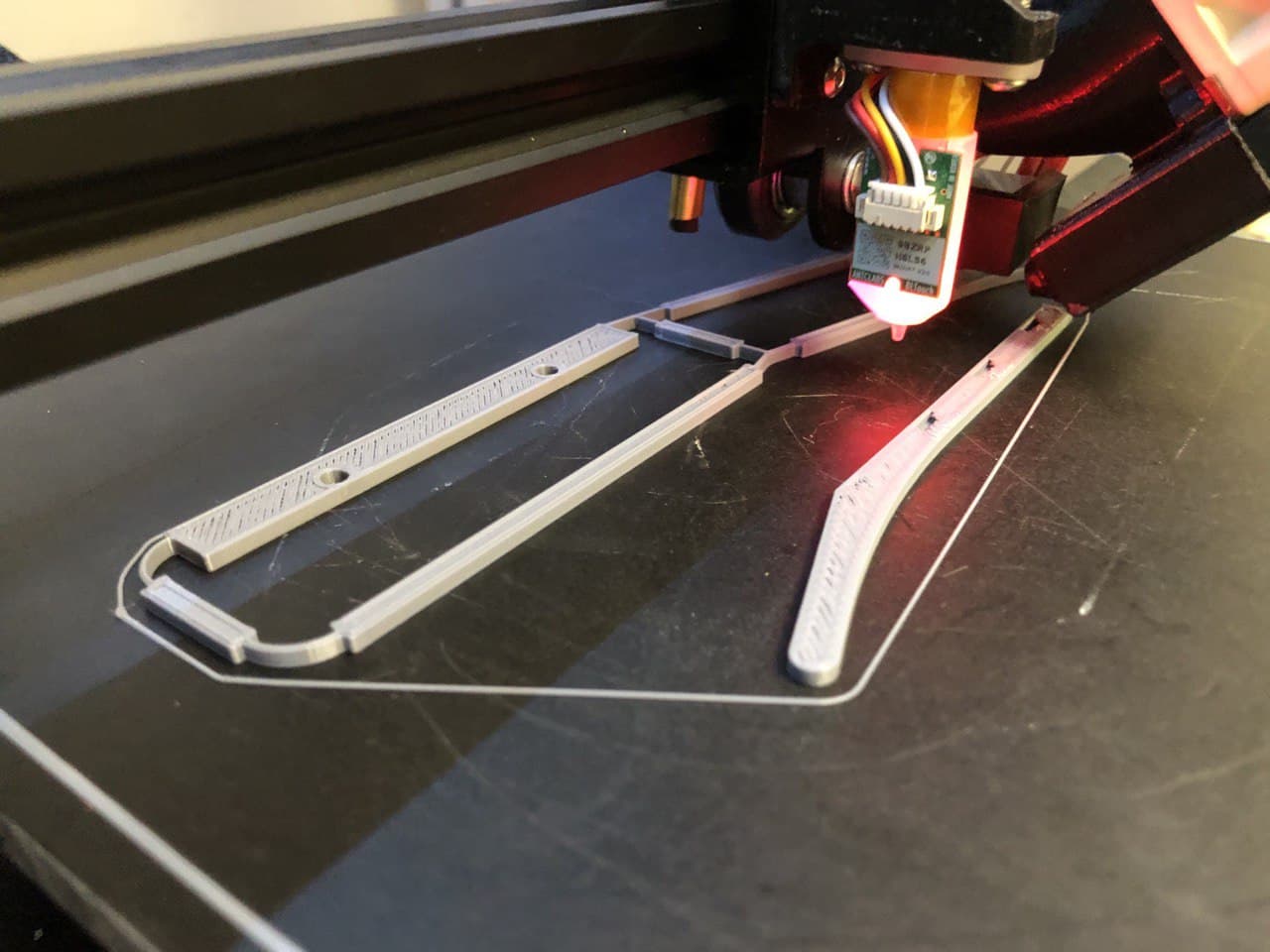
How We Built It
All design and simulation were done with Solidworks. Parts were fabricated on x2 Ender 3 3d printers with PLA and the Prusa Slicer in order to optimize print times. Our workflow was very collaborative even though we were 500+ miles away; we were able to go through several iterations together.
Challenges
We were not previously well-versed in compliant mechanisms other than watching a cool Veritasium video link. After reading several research papers, we came up with a basic framework and began designing our own flextures. Utilizing traditional parametric based CAD for design of compliant mechanisms was difficult, as was learning how to properly evaluate our joints in FEA simulations.
Accomplishments
We are proud of the fact that we have multiple iterative designs of a compliant mechanism for a prosthetic finger. We believe we have made promising strides toward our ultimate goal of developing a simple prosthetic design that can be widely accessible to individuals in low-income situations.
What We Learned
Brian worked on generating 3d printable designs within Solidworks while Michael utilized his 3d printer skills in order to create rapid prototypes. Scott learned the basics of FEA (Finite Element Analysis) in order to determine where our printable designs could use reinforcement in order to stand up to forces within the real world, and how we might optimize the design moving forward.
What's next for Design of a Compliant Mechanism for Prosthetics
We plan on further exploring the usage of these compliant mechanisms and refining the design. This concept can also possibly be integrated with Scott’s current myoelectric prosthetic hand.
Built With
- 3dprinting
- solidworks

Log in or sign up for Devpost to join the conversation.