
Inspiration
We were inspired by delivery bots that deliver goods like ordered food, groceries, and other items. We thought a great addition to the house was a robot that was able to bring you things you needed, and forgot where they were placed.
What it does
The DeliverMe-Bot makes use of cameras placed in rooms around the owner's house. Using the object detection of the cameras, a catalogue of household items is able to be selected from. After the user inputs an item that is seen on the cameras that they desire to be brought to them, the DeliverMe-Bot sticks to a path straight to the item, then grabs it with its claw. Finally, the DeliverMe-Bot drops the item in its body and moves to the user.
How we built it
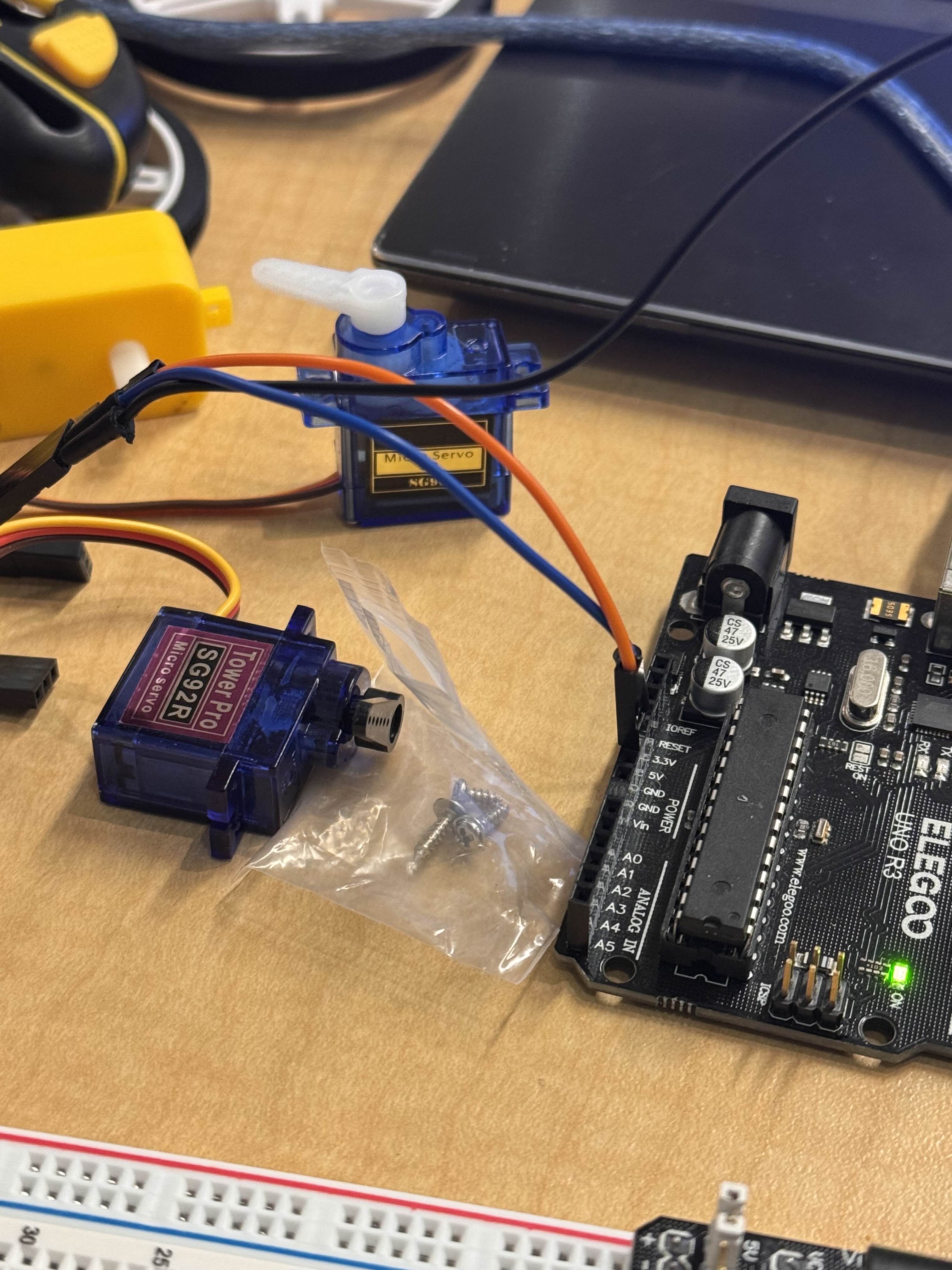
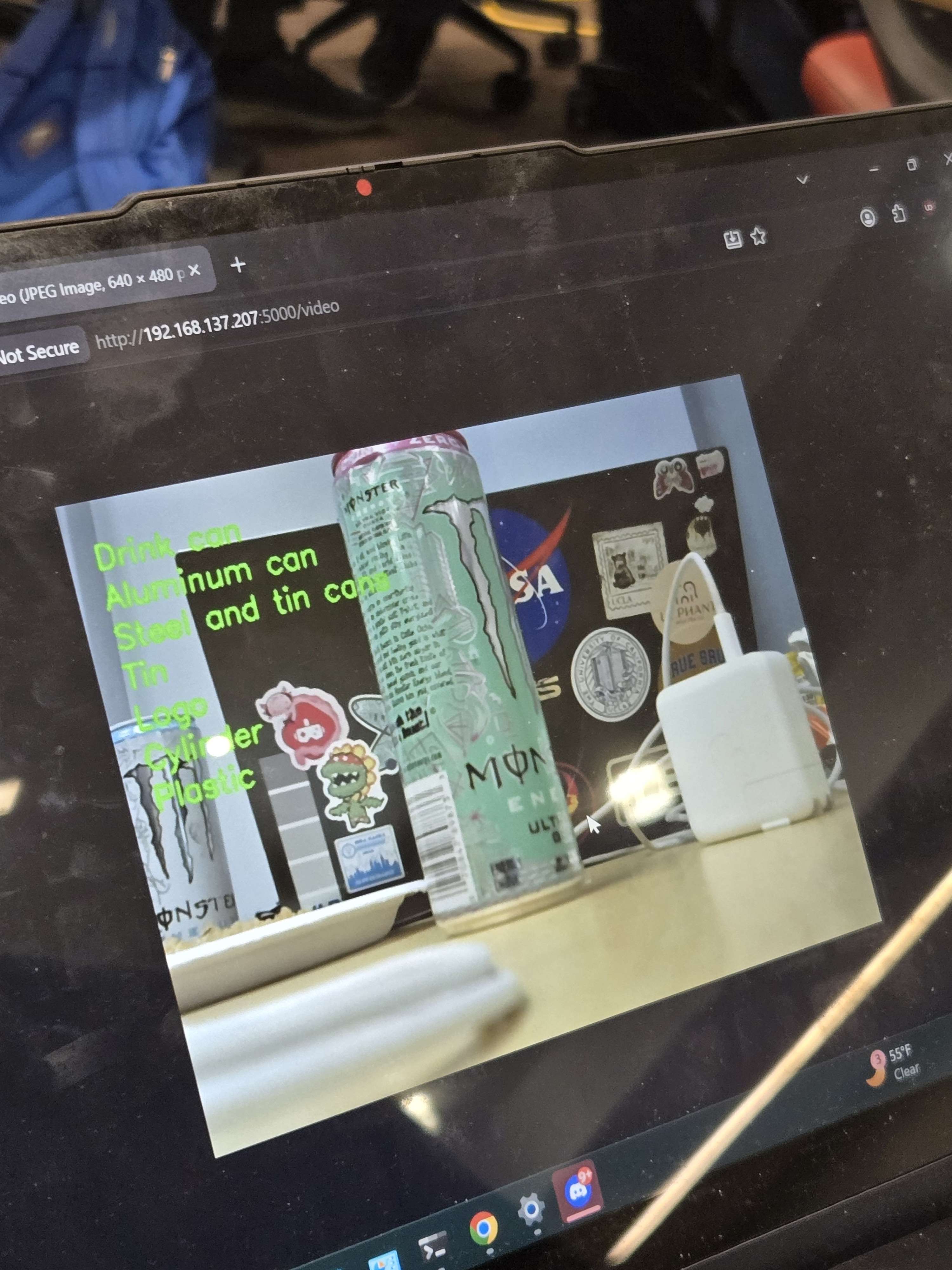
The USB camera was accessed using an Arduino Uno q, using the Linux capabilities. Additionally, using Google's Cloud Vision API and label detection, the objects detected on screen cover a wide range of household appliances and brands. The user interface was created with the ESP32, which hosts a website that provides the user with options of items to retrieve. Once the user confirms the item they want, the ESP32 sends a signal to an Arduino Uno q on the DeliverMe-Bot. This Arduino Uno q uses an Arduino Uno R3 to control motors on the wheels of the D.M.B., and the servos on the claw.
Challenges we ran into
We struggled initially to get the Arduino Uno q to work, using Arduino App Lab. We eventually ended up using a different method by ssh into the IP address. Also we had some issues with configuring our motors all together in a way that was able to run smoothly. Finally we spent a lot of time setting up the ESP32 hosted website.
Accomplishments that we're proud of
We are proud of figuring out the Arduino Uno q functionality and being able to use Google's Cloud Vision API, since it was satisfying to see it work and detect brands and items compared to a lower accuracy model. We are also proud of creating a network of microcontrollers to connect with each other and communicate.
What we learned
We grew a lot in both hardware and software aspects. We learned a lot about using Google API, and how to wirelessly send information and signals. We also were able to use I2C with our Arduino to control our motors and servos.
What's next for DeliverMe-Bot
DeliverMe-Bot still has much to improve, especially in terms of bot accuracy and securing the item so that it isn't damaged. If commercialized, DeliverMe-Bot could have an app developed.

Log in or sign up for Devpost to join the conversation.