-
-
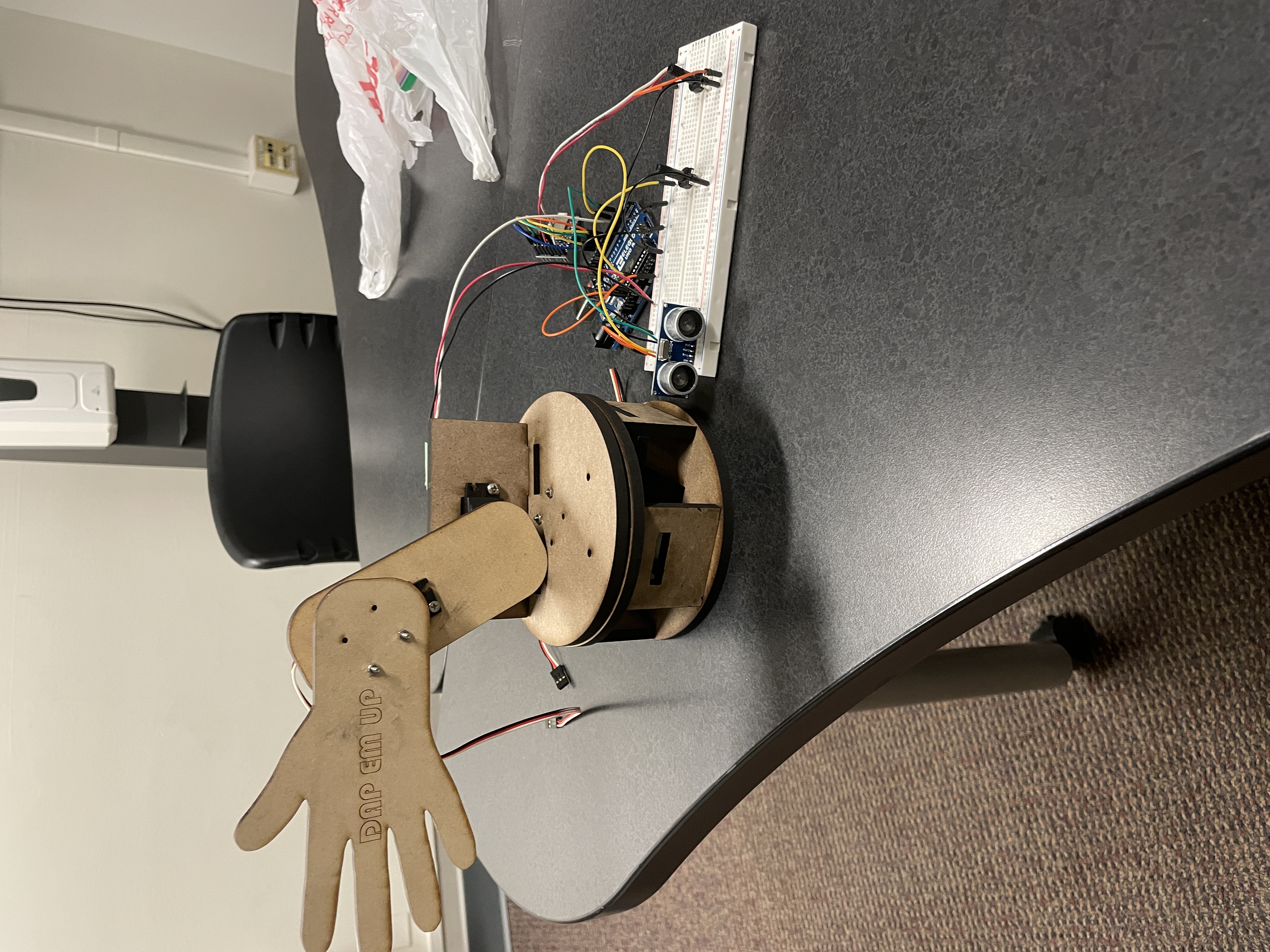
DAP EM UP is a robot arm with 3 degrees of freedom giving the user that much needed high five. Bluetooth and ping sensor activated.
-
-
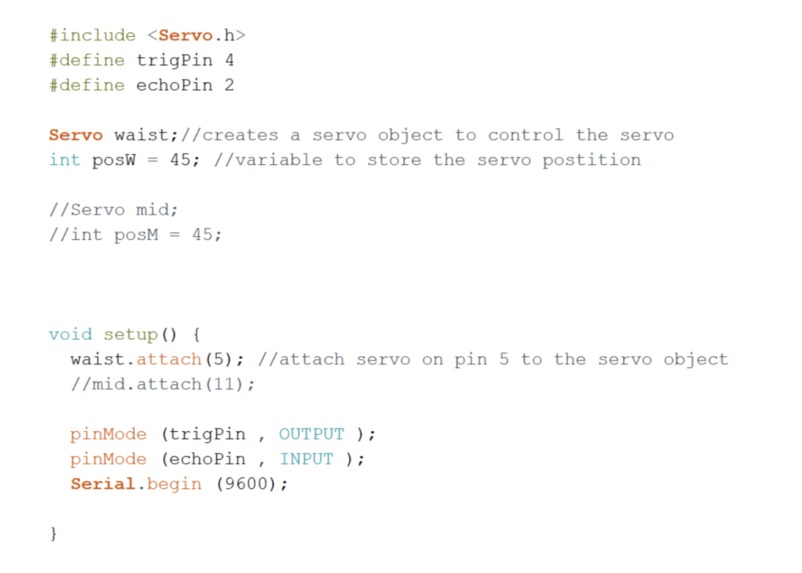
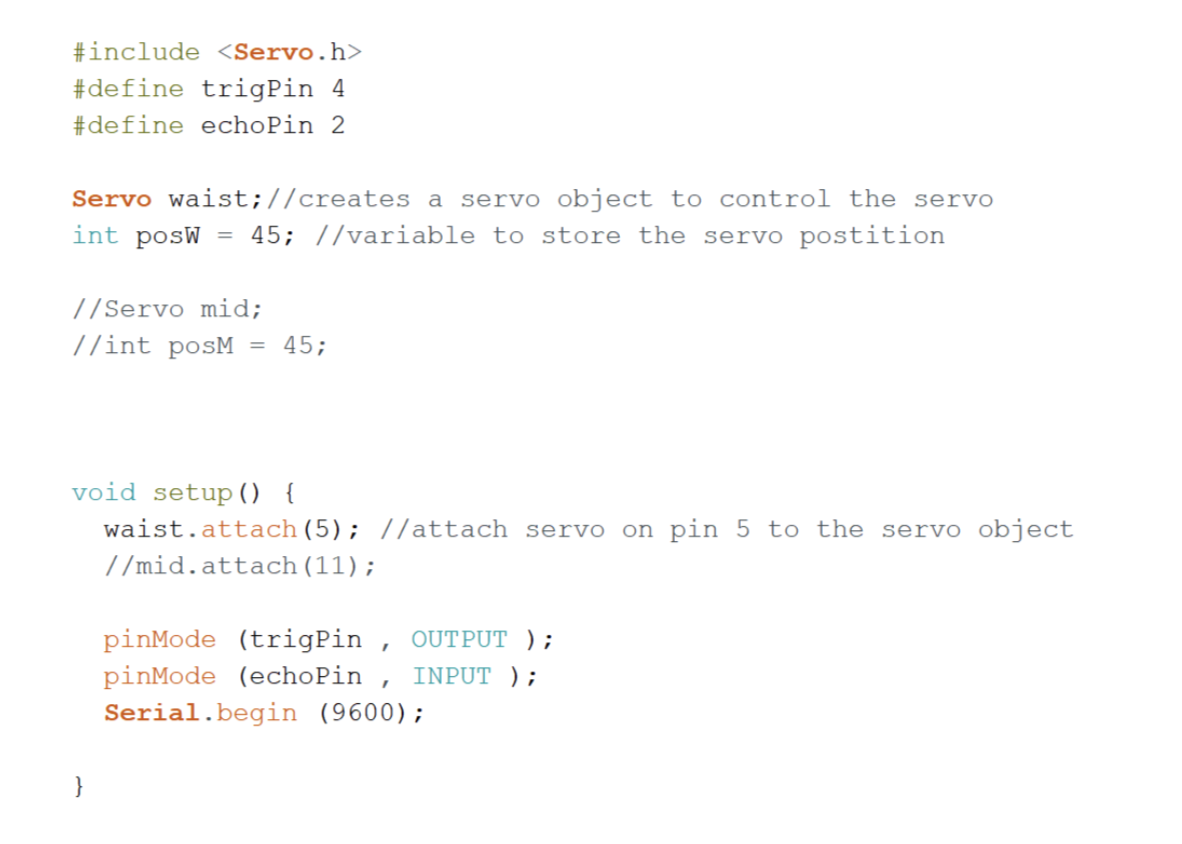
Sensor Code
-
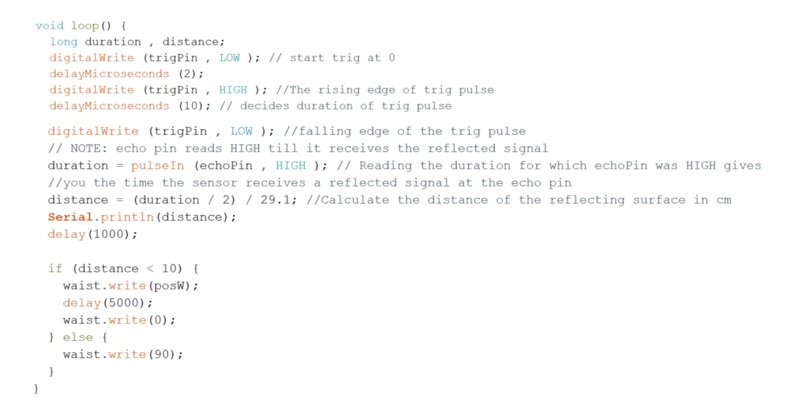
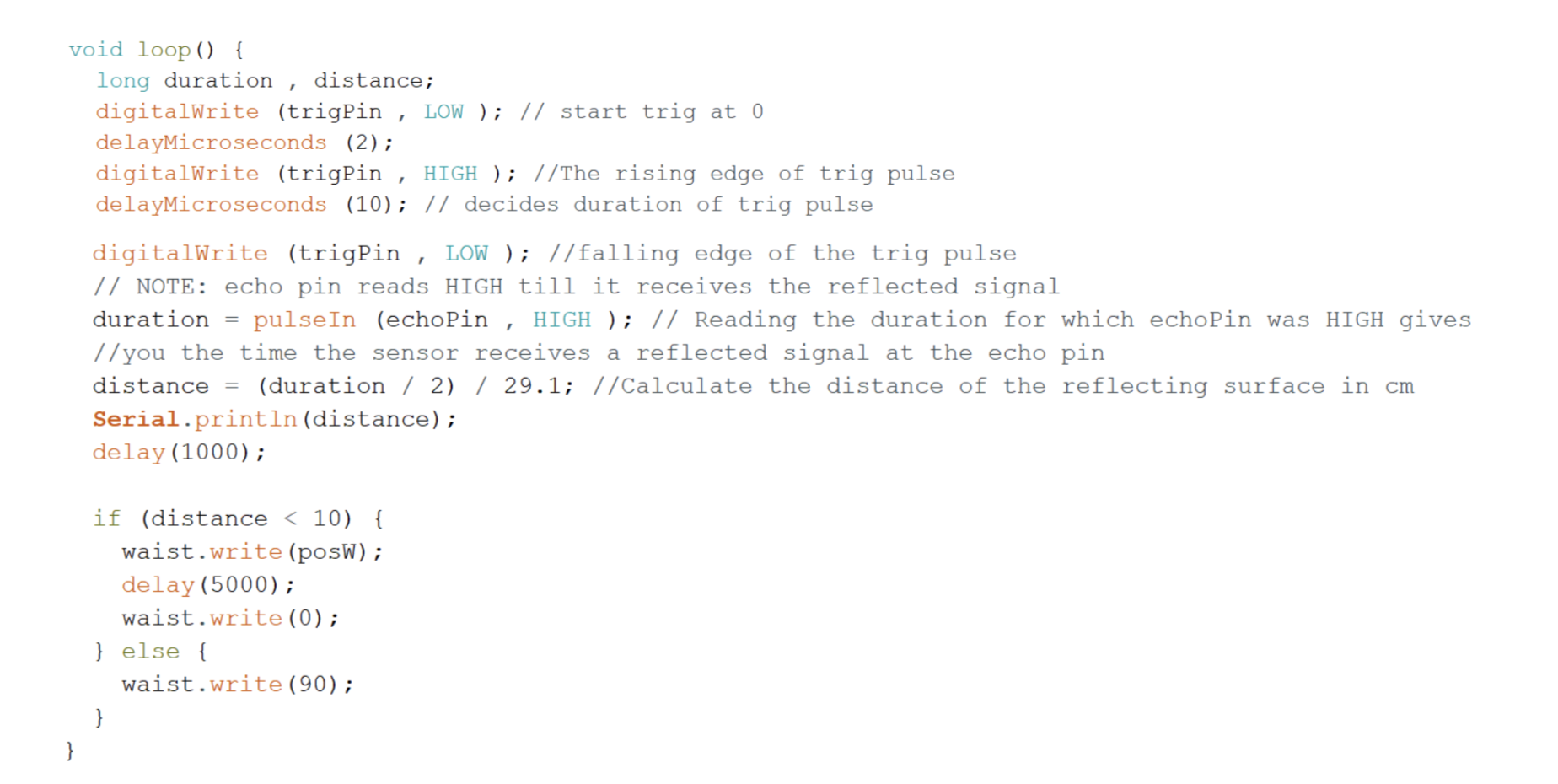
Sensor Code Pt 2

Inspiration
We were feeling bad until our friend gave us a dap. We realized that this dap-given feeling was universal, and decided that it needed to be mechanized and automated.
What it does
Either by proximiity or remote control, this robot will give you a clean dap
How we built it
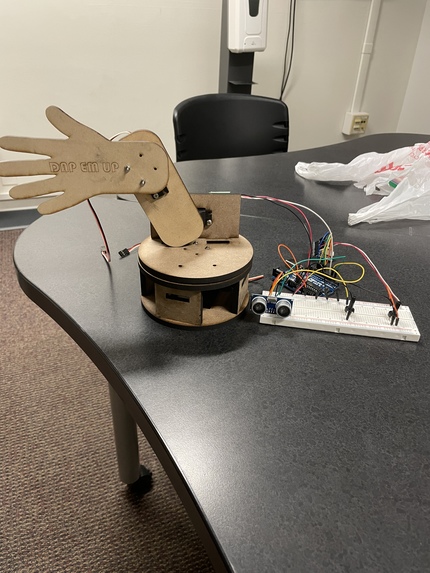
Dap Em Up is a 3 DOF robotic arm with a laser cut hand piece as the end effector. [arm design] The arm is powered by 3 servos. There are 4 main sections of the arm: the waist, the mid joint, the middle section, and the hand. The waist enables rotation about the z axis and consists of two platforms supported by standoffs. Attached to the standoffs within the waist is a bracket that houses the waist servo. The middle section houses the middle section and the motor can press fits into the waist. The middle section has a press fit attachment for the middle servo horn and also houses the servo for the hand. The arm generally gets smaller after each joint in order to keep the torque on the middle servo at a minimum.
Challenges we ran into
The greatest challenge we faced was determining how to code for our automatic, sensor-triggered operation and our bluetooth functionality. We had to augment, adapt, and add to disparate codes from across our course. A difficulting which consistently arose throughout this generative process was troubleshooting wherein the fault in execution lie, namely, whether the issue was digital or mechanical. For example, another major challenge we faced was getting enough power into all of the servos.The arduino was powered through a USB port. Our design, consisting of three servos, approached an obstacle in that the arduino could supply, at maximum, 5 volts of power, which was only enough to effectively power one servo. While our code was perfectly valid, it took us a long time to understand that the reason our servos were not running together was in fact the lack of power. Our realization of this required us to simplify our design to consist of a set position for the arm–alleviating the need for two of our three servos–and to focus on the base servo which provided the rotation around the z-axis. Another issue we came across was in creating an amalgam of our ping-sensor, automatically functioning code and our bluetooth code. We eventually realized that it would be far more
Accomplishments that we're proud of
What we learned
We learned a great amount through this project, especially within the domain of coding. We learned the target keywords germane to our efforts–servo operations, creating loops, reading sensor feedback and and functioning from it, as well as bluetooth–and how to use them. We also learned about the limitations of our hardware, and how to design with those limitations in mind.
What's next for Dap 'Em Up Bot
We would ultimately like to have functionality for all three servos. To do this we will need to have a separate power bank for the servos. It would also be nice to merge the two programs to have them running under one sketch allowing the user to trigger the motion either via bluetooth or with the ping sensor. Mechanically, we will phase out the press fit parts and drill better holes so that the servo horns are more aligned and can more reliably attach to the sections of the robot.
Built With
- arduino
- solidworks

Log in or sign up for Devpost to join the conversation.