-
-

Billy's most attractive angle
-

Billy's backside
-

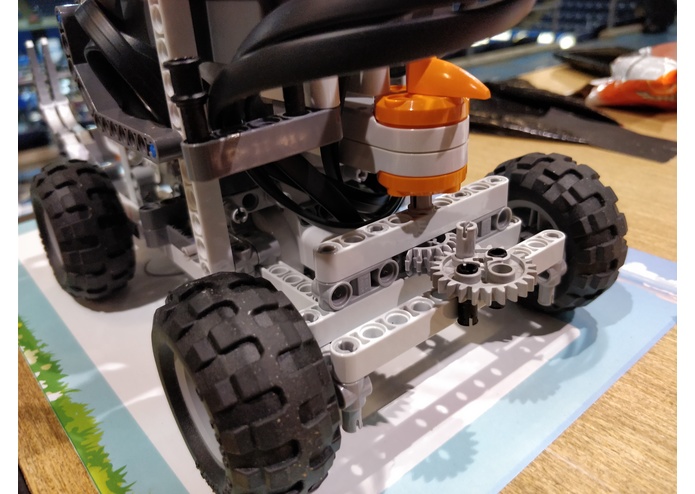
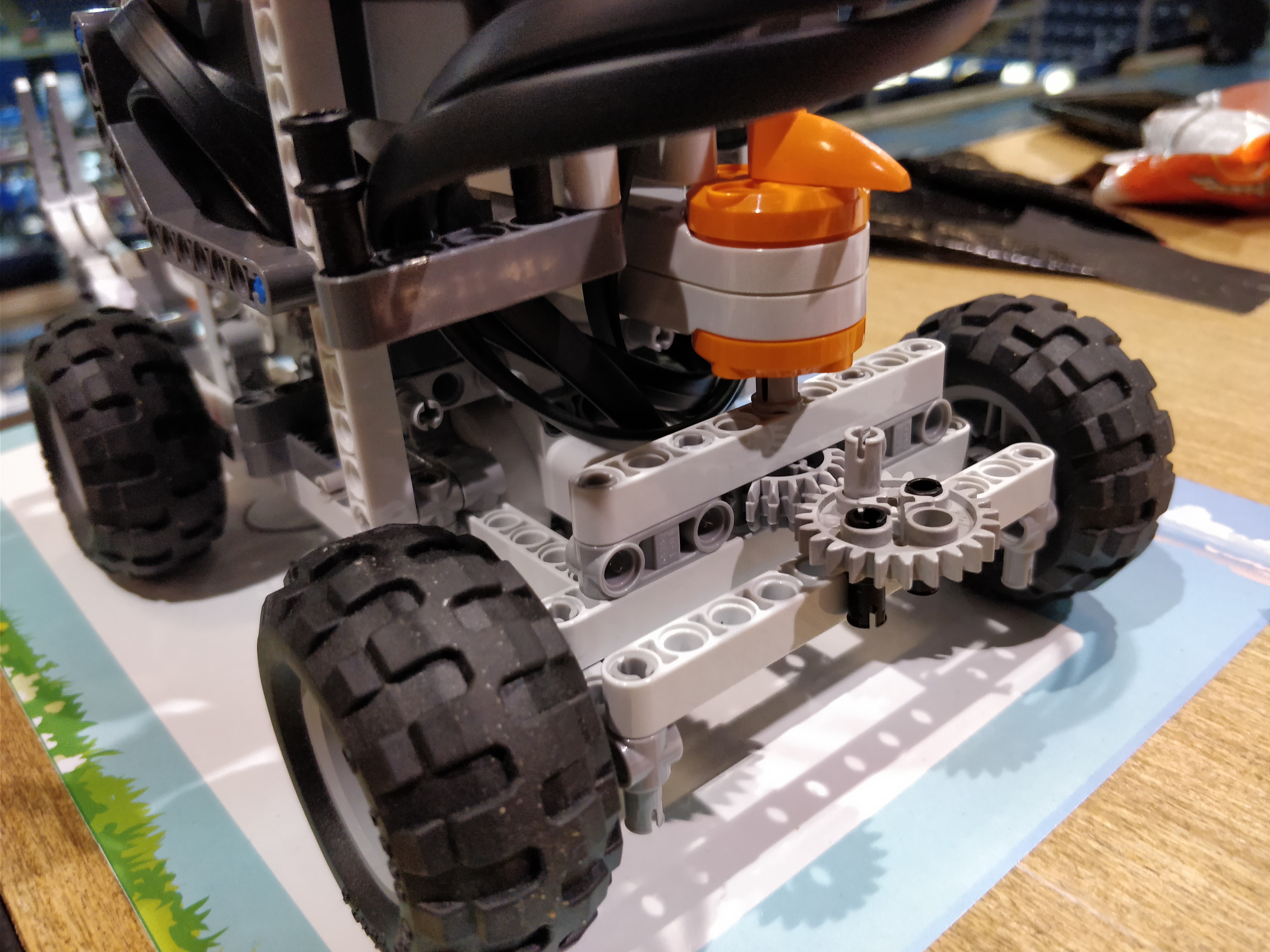
Billy's drivetrain
-
Billy's steering system
-

Billy's front wiring
-

Billy's back wiring





Inspiration
Our group came to the hackathon without clue what was going to come out of our teamwork. But we wanted to make something out of what we had at home that can create benefits for the health aspect. One member, being a Lego enthusiast, had the NXT microcontroller. With the kit, we decided among various projects and different implementations. However, the "robotic pet" stood out to us as the most fun and doable project idea that can benefit for mental health.
What it does
Billy, the smart and dumb robotic pet, can walk around your home autonomously without colliding with objects in front of him. He can also respond to sounds, touch, and even light! Billy has various expressions/gestures and still learning. Billy has three motors that can also read input, a light sensor for sensing dark and light environments, a infrared sensor for finding distance, and a sound sensor for listening.
How we built it
Our team members all had different skill sets, but the one thing we all had in common, was the will to built and put something together. Nishant, a computer engineer, animated the face and sounds of Billy as well as made the website. Elton, also a computer engineer, designed, prototyped, and built Billy from scratch. Henry, a biomedical engineer, pioneered the idea for supporting mental health and helped with checking and debugging. Finally Sidney, a computer engineer, lead the coding of the microcontroller and tested the components. Together, we assembled and programmed BIlly as far as the 24 hours let us. With all our abilities, we learned how to mount and use the sensors on Billy, and make him come to life! Learn more in: damnitbillywhycantyoulearnhowtouseafishing.net
Challenges we ran into
Billy is smart, but sometimes he's dumb. The sensors we used in our design are not perfect which will sometimes yield incorrect outputs and actions (such as the sound sensor). One mechanical design problem was due to the lack of a differential for Billy's drivetrain. This was due our limited amount of Lego parts available. Without a differential, Billy struggles when he does extreme turns.
Accomplishments that we're proud of
In the 24 hours we were given to create a hack, we came up with a fully working prototype of our idea. Our group worked as a team and we felt extremely accomplished to know that we leave this hackathon having built something that did what we brainstormed it to do.
What we learned
In this hack, we learned how to program a NXT microcontroller and have it control motors all in sync. We were also able to mechanically design out robot and learn about the physics of gearing, drivetrains, and sensors. We also learned a bit of animation when making Billy's cute expressions!
What's next for Damn it Billy! (NXT pet robot)
Billy still has a lot to learn, from more implementations of it's sensors to more complex routines. In the 24 hours we were limited from time. But in the foreseen future, the Billy can be able to connect to the internet to take data for new skills and become more interactive through developments in machine learning and cloud computing. Billy can become more expressive, have more functionality/sensors and gestures, and be the companion you need, all for the support of mental health!
Built With
- flash-cs6
- lego
- nxt
Log in or sign up for Devpost to join the conversation.