-
-
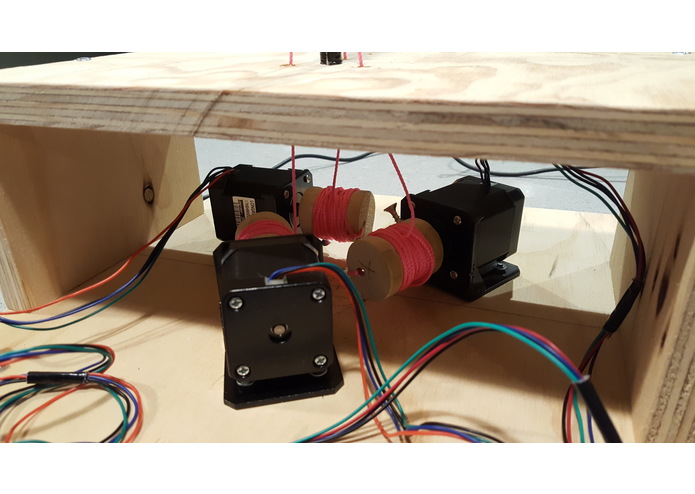
Servos
-

Full hardware system, rear view
-
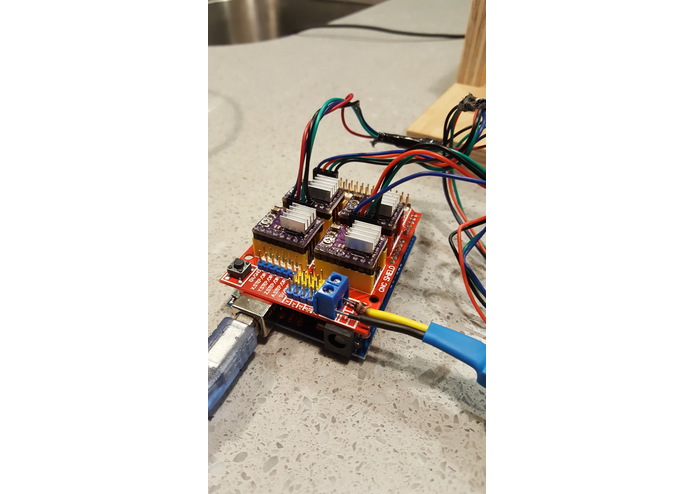
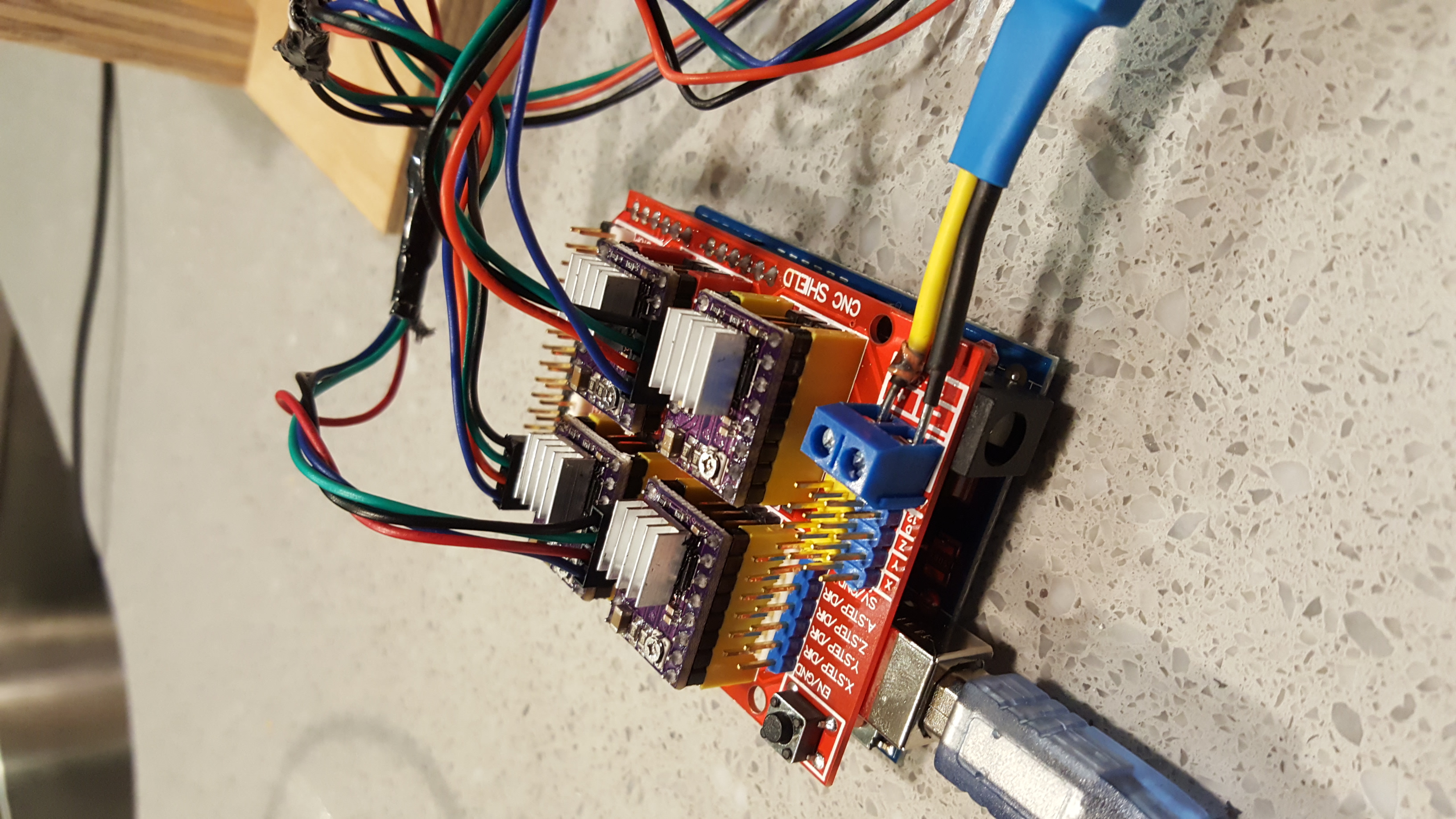
Arduino with attached CNC shield and servo drivers
-

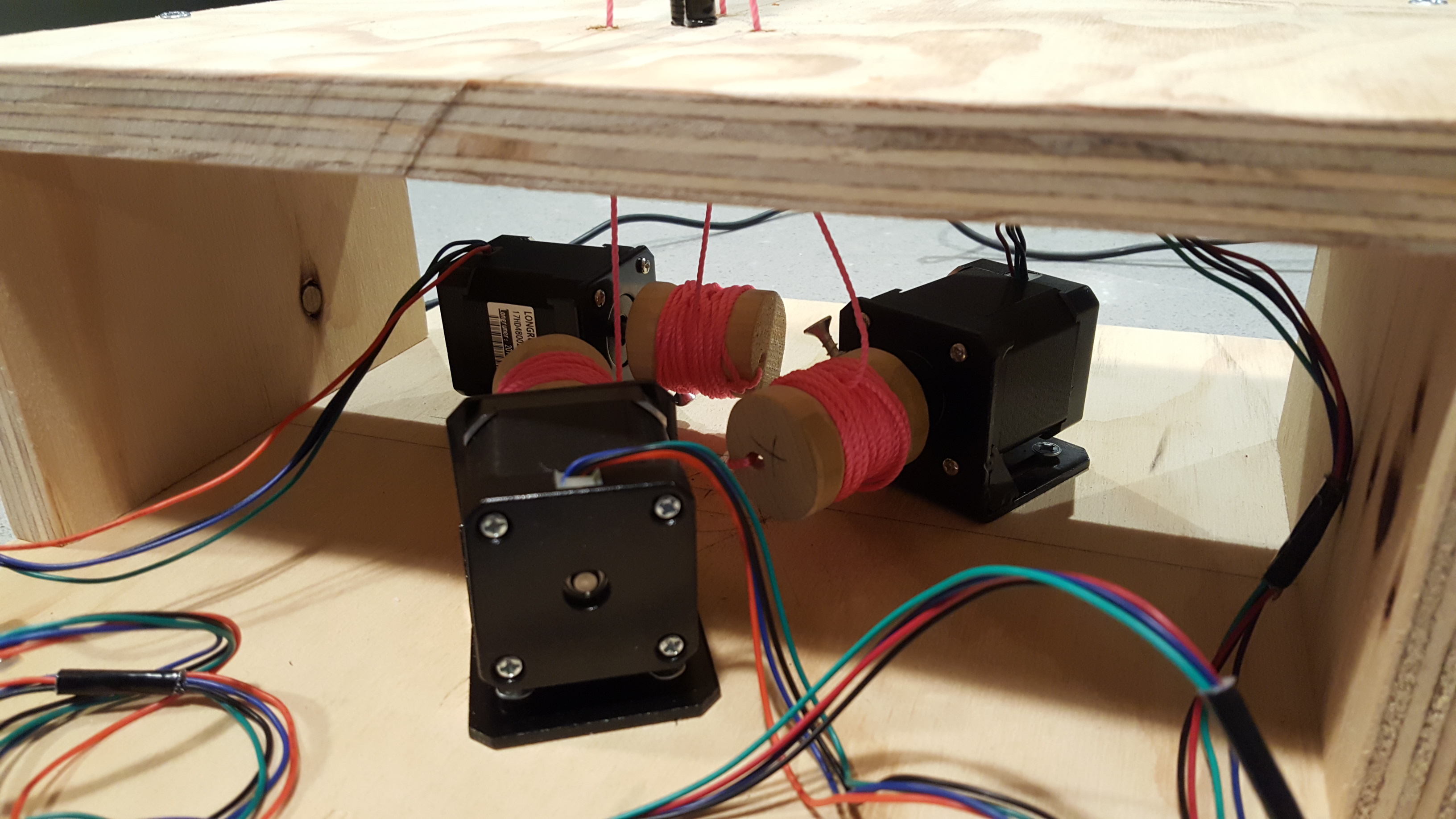
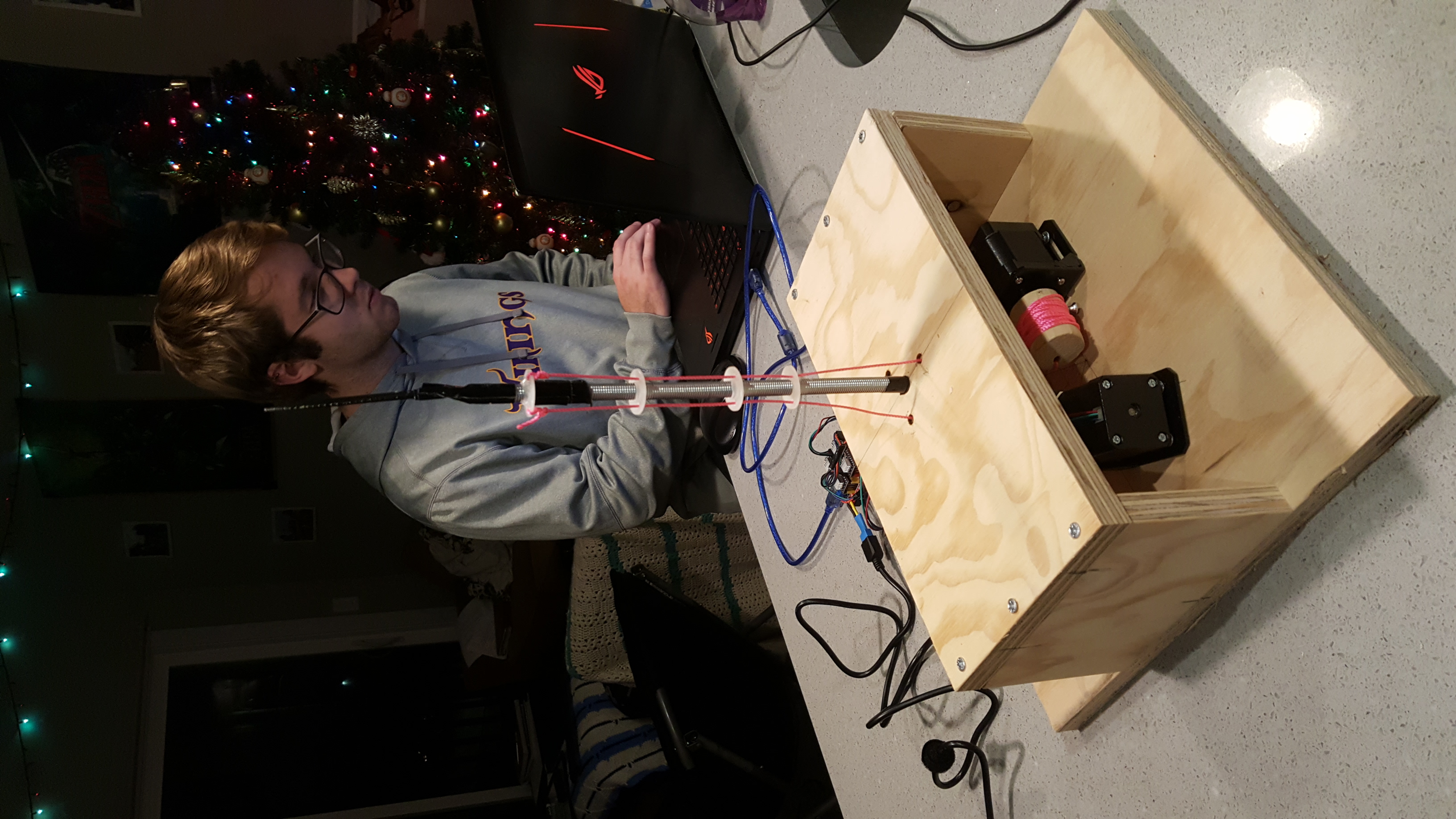
Full hardware system, front view
-
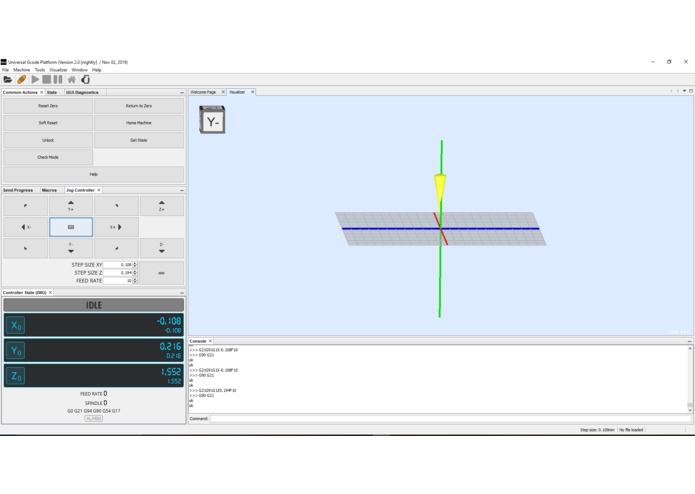
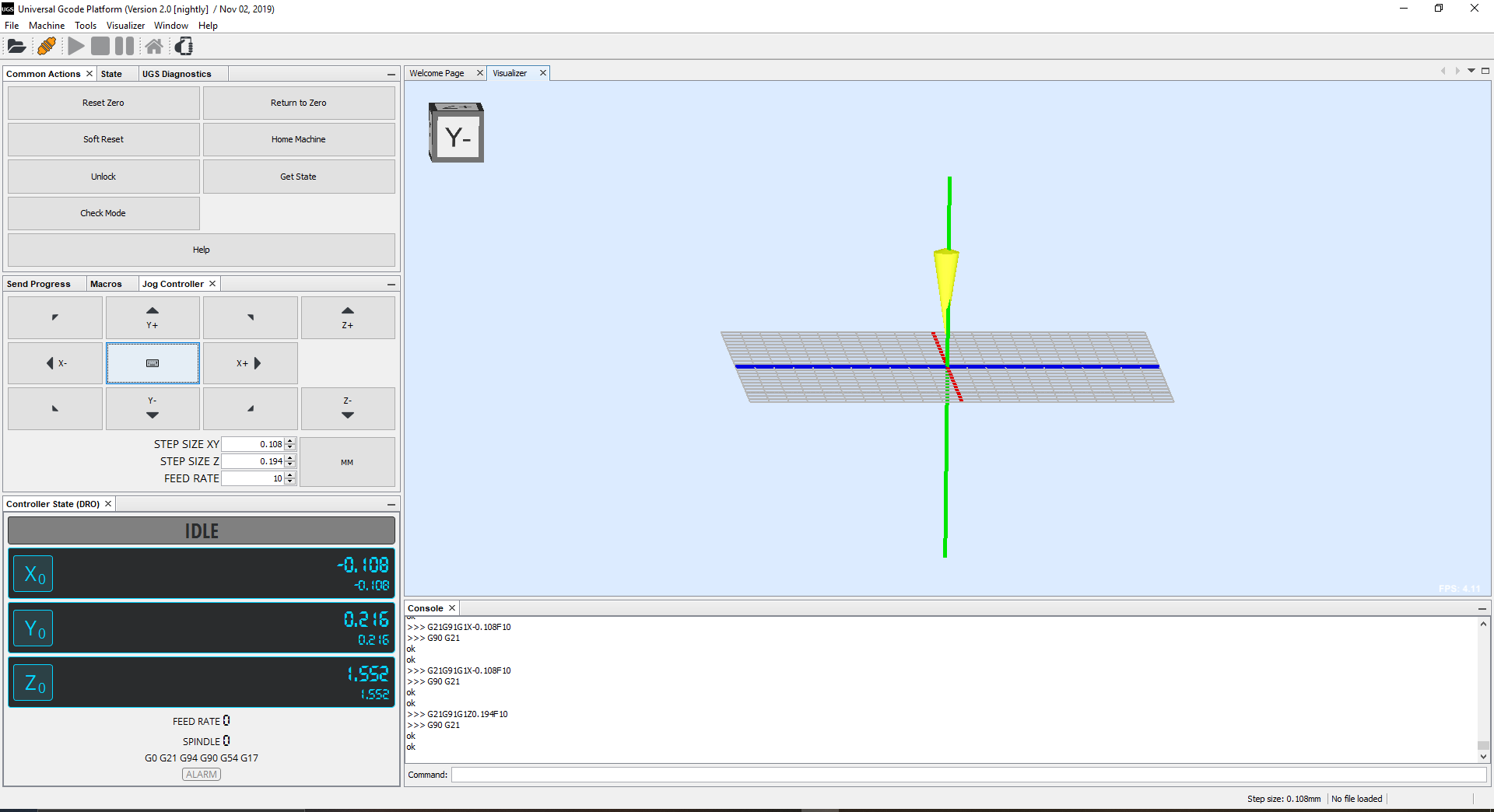
Computer interface

Inspiration
Today, most robot arms operate with several rigid linkages and servos moving them. What if they were not limited by these inflexible linkages and could move more similarly to a tentacle? They could be used for a number of novel applications, from fishing clogs out of drains to saving lives by assisting surgeons in minimally invasive surgery. The idea behind the D.O.O.M.B.A. is to develop an extremely flexible open source robot arm that can eventually become applicable in these situations.
What it does
D.O.O.M.B.A. uses three servo motors with strings attached to pull a central spring to the desired position. Commands are sent from a computer to the system to control the speed and position of the arm.
How we built it
To start, the electrical system was assembled and the motors were tested. A laptop power supply was purchased to provide power to the motors and modified such that it could connect to the Arduino CNC shield. Wood for the frame was marked, cut, drilled and assembled. Next, the electronics were attached to the frame, spools were cut from a dowel rod, and affixed them to the servos. Nylon washers were drilled such that the string would pass through them and that they would fit tightly on the spring. Finally these washers were put onto the spring, string was run through them, and the spring was set in place.
Challenges we ran into
We ran into many challenges making this robot arm, but the main ones involved some interesting design limitations and hardware problems. The first of which was the need for a spool for the string, which was something we overlooked. We fixed this by building spools from scratch using a wooden dowel. Furthermore, we ran into some programming errors which were especially hard to debug because the software had almost no error information other than an error existed. To solve this, we went through the start up operation and checked the settings, making sure each bit was the value we needed and did some internet digging to make sure we had the right values to achieve our goal. Another problem was that we had no power supply that would fit our CNC shield. We solved this issue by buying a computer power supply and using a paperclip as the new prongs to connect the supply to the shield. We added heat shrink to give some insulation and keep the paperclip from touching itself, which when tested worked perfectly. The last big problem we had was not being able to hold the servos in a single position so that we could get the arm to hold its position. To solve this we had to set a specific field to all 1’s, which allowed the servos to be constantly fed power so that they could hold their position.
Accomplishments that we're proud of
At the end of this, we are happy to say we have achieved our goal of creating a truly flexible robot arm from open-source parts. It may not be quite ready for surgery, but it is a significant step in the right direction! The interface is intuitive, all parts are easily replaceable, and the arm works as intended which is wonderful.
What we learned
Over the weekend we learned about and improved our skills in a variety of areas including arduino, circuits, gcode, and the physical side of building the frame, arm, and joints. The kit we used was an arduino cnc kit, which used gcode an all new language that allows the programmer to give instructions to the three servos to go in three directions, X, Y, and Z. In order to work with the hardware we needed to learn more and brush up on our embedded systems skills when we had to deal with setting flags for certain pieces of functionality we wanted. Some group members also got some new experience working with hardware and circuits for the first time by helping wire everything up.
What's next for D.O.O.M.B.A.
The next steps for D.O.O.M.B.A. would be adding in a more natural way of controlling it our initial ideas were with potentiometers or a joystick. We would also need a better cooling system so we can go for longer periods of time before we have to cool off the board, and a more improved hardware control scheme to give more range of motion/precision to the arm. There is also the idea of a portable power supply to allow for the device to travel or not be constrained by a wall outlet.
Built With
- arduino
- grbl
- servos
- ugs





Log in or sign up for Devpost to join the conversation.