-

Top view of arm
-

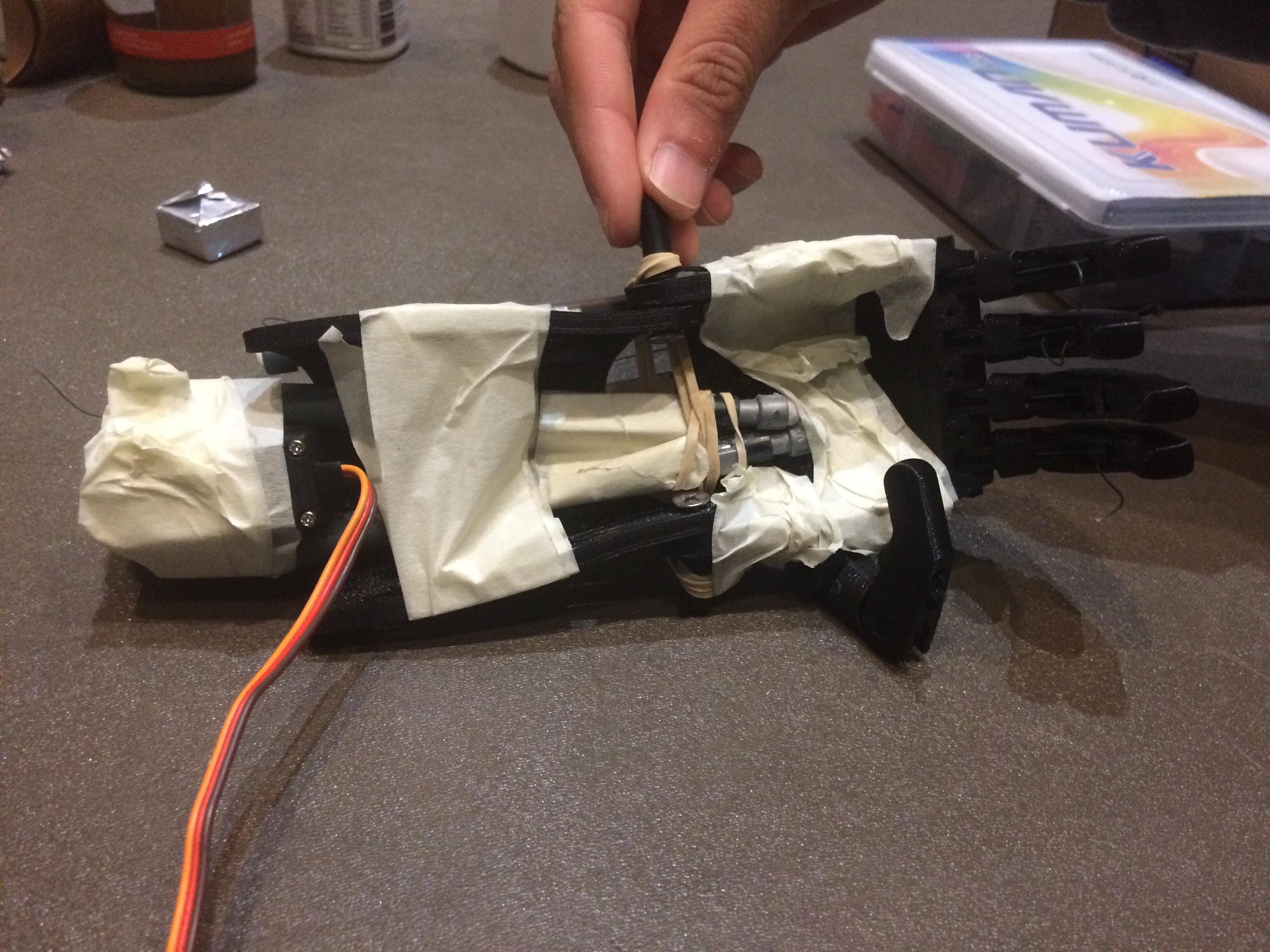
Underside view of arm

Inspiration
As electrical and biomedical engineers we wanted to create something that represents our interests in medicine and software. We hope to help people in the future and we feel that a prosthetic arm connected to a Servo best represents what our goals are for the future. It is also our first time ever creating hardware, so we wanted to challenge our knowledge and collaborate on this project.
What it does
The fingers grip and release through commands from serial monitor from Arduino.
How I built it
The base arm was 3D printed. Nylon rope was used to tension the finger joints. Fishing wire was run through the fingers and connected to a servo mounted in the back.
Challenges I ran into
Mounting the servo was a difficult problem since we lacked the tools for it. We also wanted to connect an individual servo to each finger and control them individually but again we ran into problems mounting all the servos. Furthermore we were planning on using flex resistors to attach to our hands and have the robotic hand mirror our hand, but we again lacked the necessary tools.
Accomplishments that I'm proud of
This was both of ours first hardware hackathon and one of ours first hackathon in general so we were very proud in being able to complete something.
What I learned
We learned more about Arduino and using servos with Arduino. Furthermore we learned about Aduino's read speed and pin checking. On top of that we learned the wiring and breading boarding for our project.
What's next for Cyberdyne Systems Project X
In the future we plan on revamping our aesthetics of the arm. Furthermore connecting flex resistors and mirroring our hand with the robotic arm. We also want to connect each individual finger with a servo and control them independently.
Built With
- 3d-printed
- arduino



Log in or sign up for Devpost to join the conversation.