Inspiration
Crater identification is an important task of environment perception. Beneficial for path planning and safe campaign of Lunar rovers. There exists blind zones on terrain that require rovers to make spontaneous decision
What it does
With preexistent images, classifying craters and their location allows scientists to prep ideal routes for rovers and make maps Prepare rovers for encountering unfamiliar terrain
How we built it
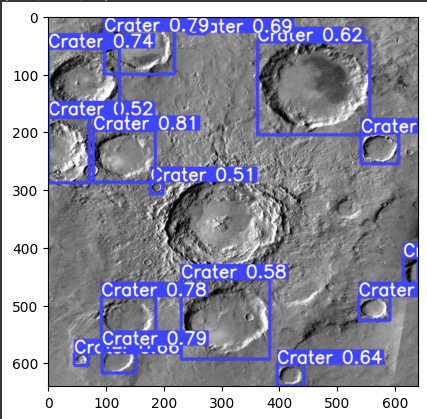
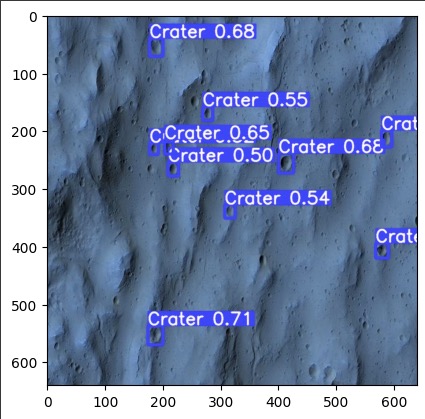
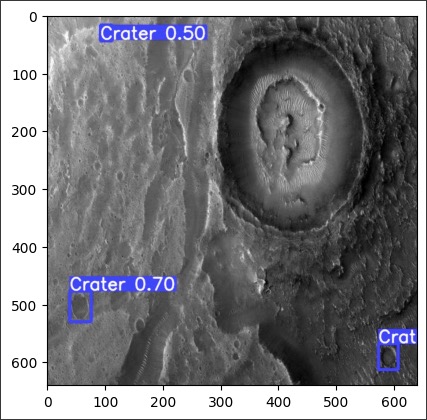
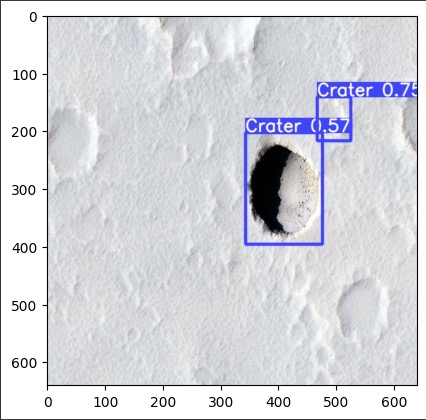
Found a dataset on Kaggle that matches our inspiration. Used RCNN models Yolov5 and Resnet50 on this dataset.
Challenges we ran into
Picking the correct epoch to run our model on.
Accomplishments that we're proud of
Optimising hyper parameters number of folds (k) and learning rate (alpha).

Log in or sign up for Devpost to join the conversation.