-
-
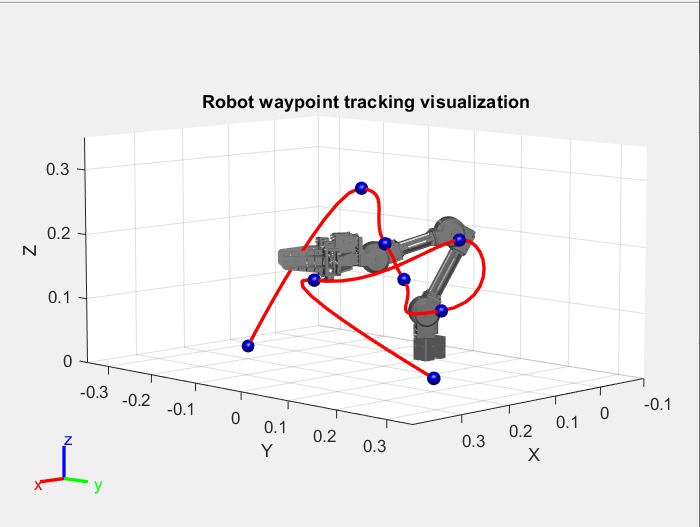
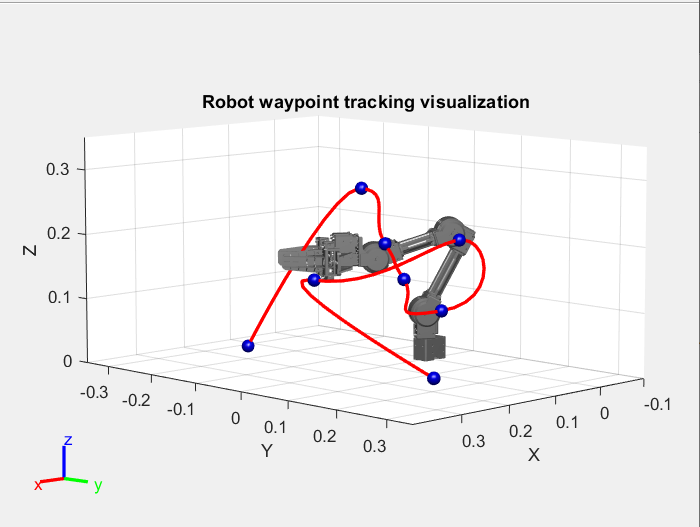
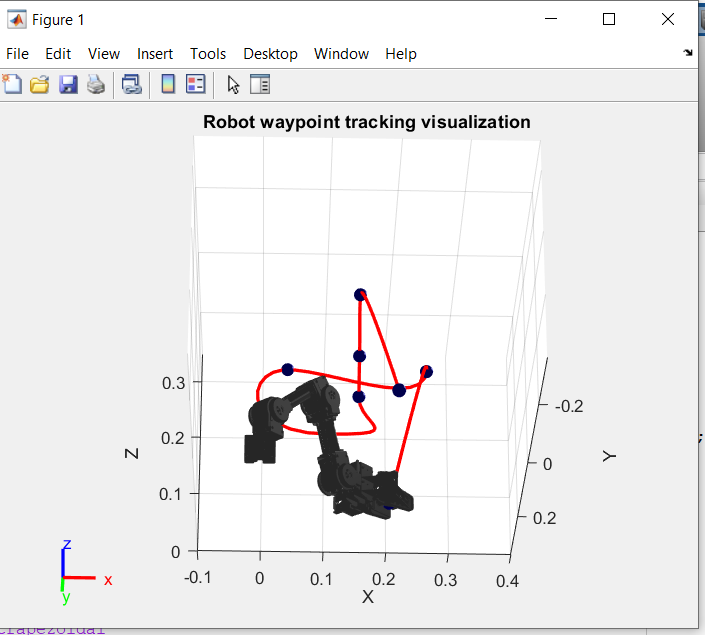
Tracking waypoints
-
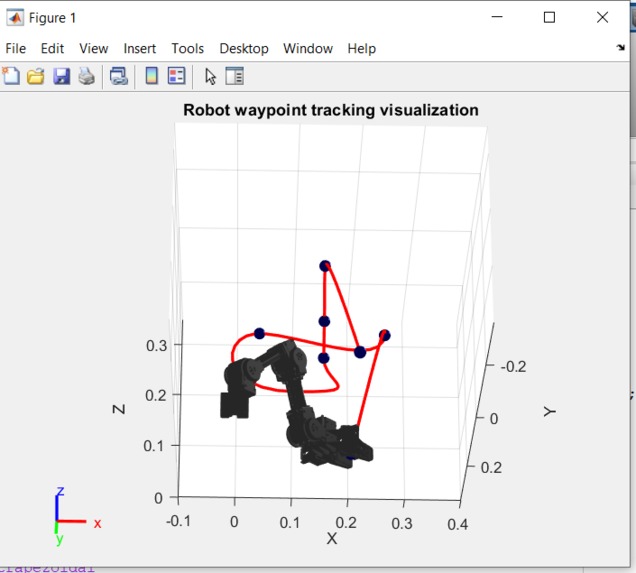
Testing the trajectory
-
Obtaining DH parameters
Inspiration
The covid times has left patients in need of assistance to do daily tasks but that poses a health risk to the ones assisting them. The henchman is a robotic arm that can be used to assist covid patients thereby reducing the risk of exposure. The arm can also be used in contaminated environments and help in minimizing casualities.
What it does
The arduino board analyses waypoints in the real-world environment and enters it into the system where simulink is used to simulate real world forces. With these in mind, Matlab is used to manipulate the DH parameters of the robotic arm which is then simulated onto the model created using autodesk.
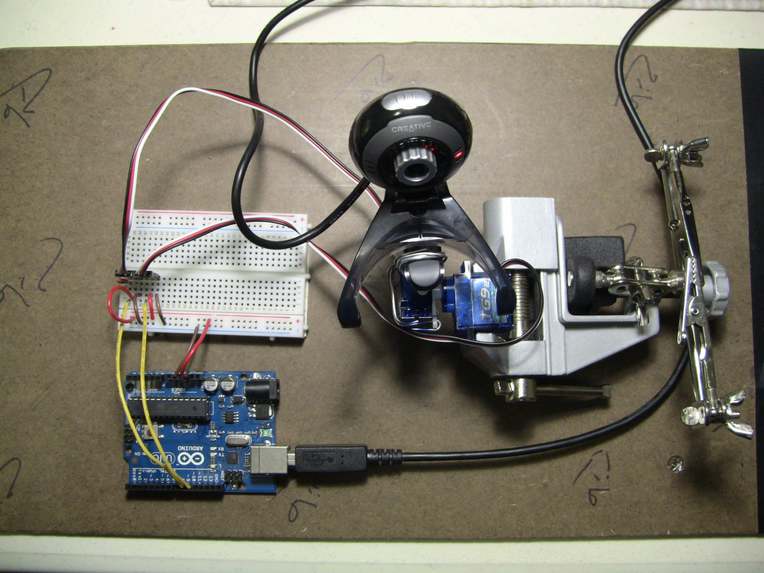
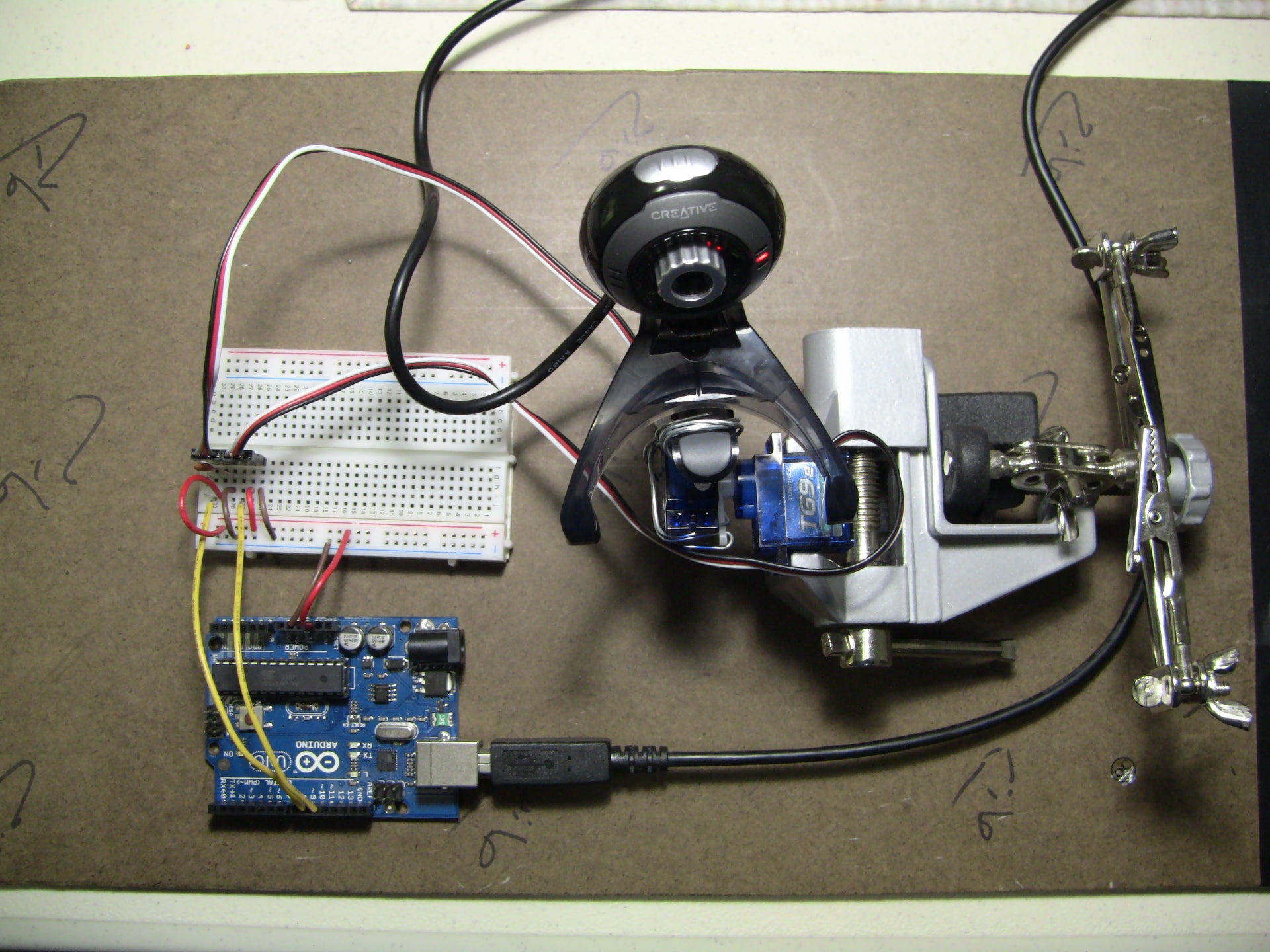
How I built it
- I used Arduino to track the waypoints by linkin it with the webcam
- The co-ordinates of the waypoints are fed into simulink which is used to model them
- Matlab is used to perform the computations necessary to obtain the arm's DH parameters. ## Challenges I ran into
- The Covid crisis has made it difficult for me to obtain all the parts that I needed for this project.
- Although I could do the Arduino part, I wanted to use Raspberry Pi to for quick interfacing but that wasn't possible. ## Accomplishments that I'm proud of I learned inverse kinematics for this project and could figure out the recursive algorithm needed to obtain the arm's DH parameters. I also did a lot of 3D modelling to get the arm just right. ## What's next for Covid Henchman Right now the hechman is just a robotic arm with 4 degrees of freedom. I plan to increase the degrees of freedom and also to model a fully functioning humanoid bot.

Log in or sign up for Devpost to join the conversation.