-
-
Title Slide
-
Ideation
-
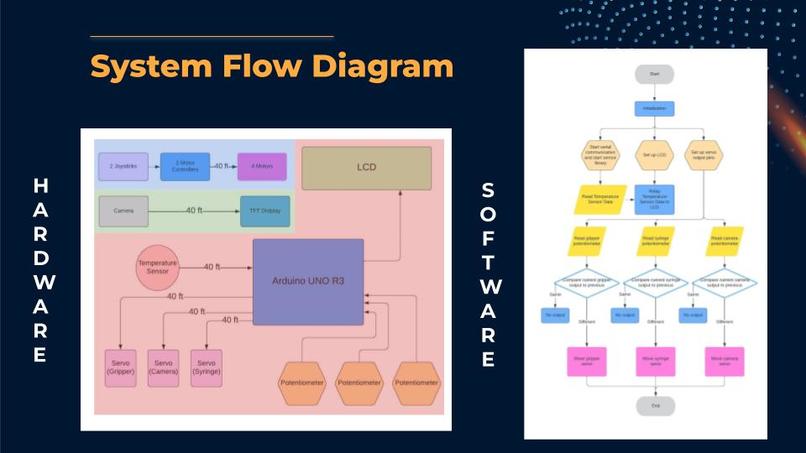
System Flow Diagrams
-
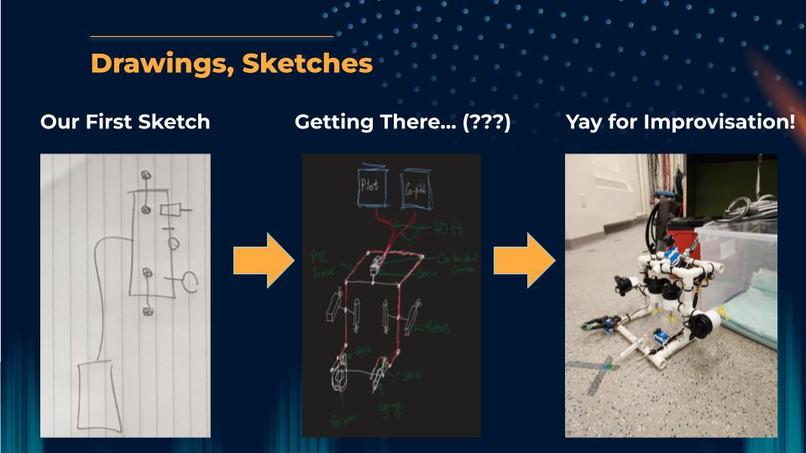
Designs
-
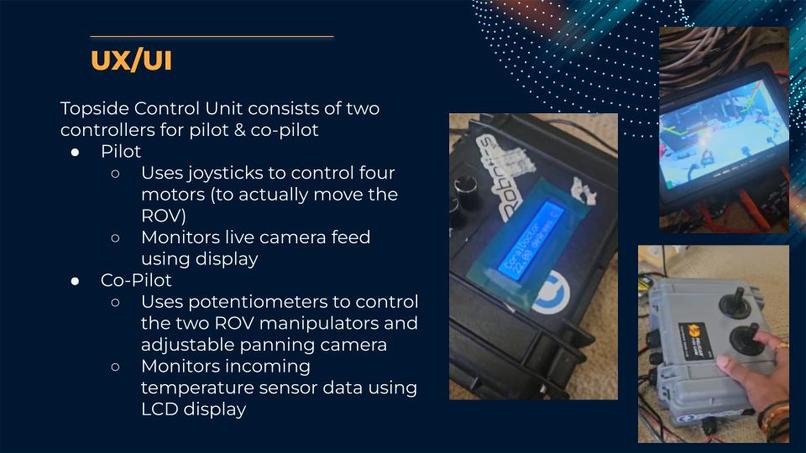
UX/UI
-

Costs


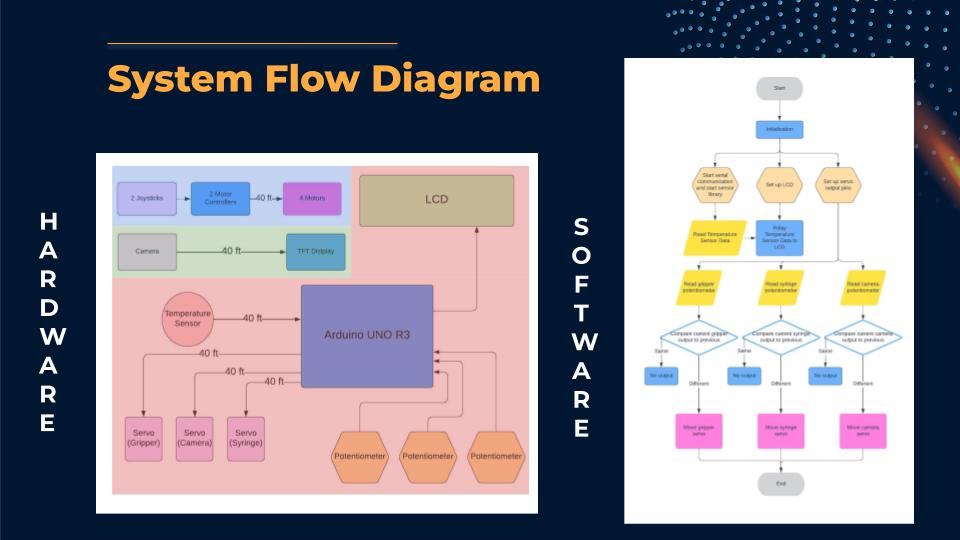
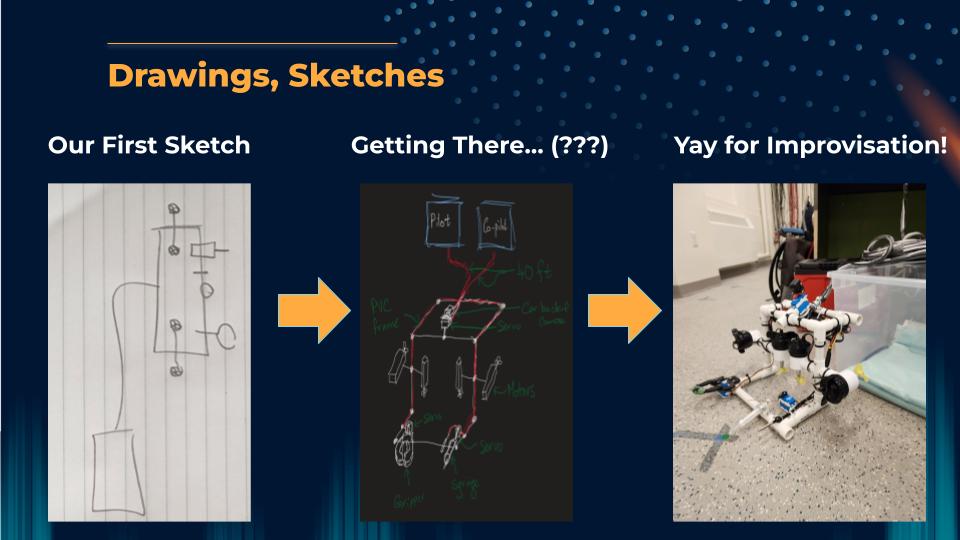
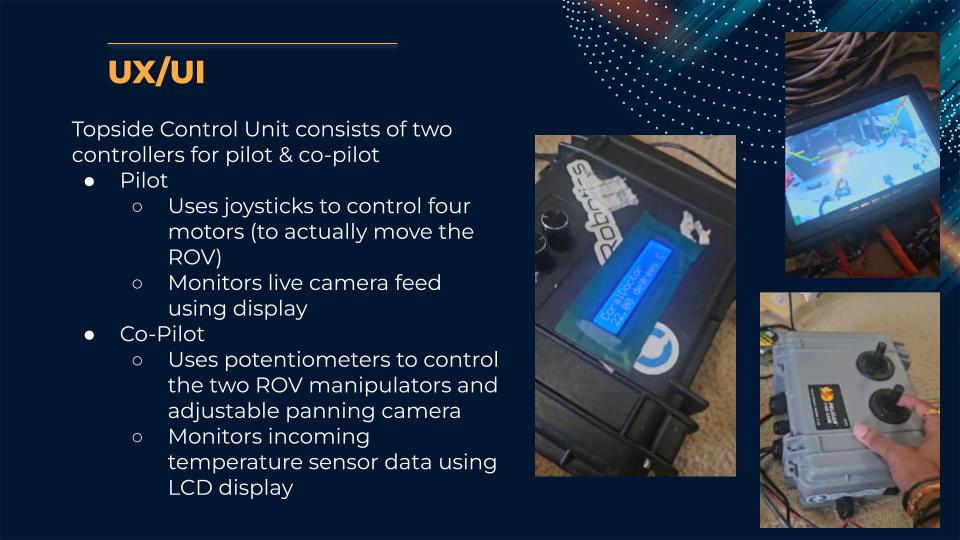

CoralDoctor is an underwater remotely-operated vehicle built for general purpose coral maintenance. The robot features a camera, a servo-powered gripper for debris retrieval, a servo-powered syringe mechanism for liquid injection and/or sample collection, and a temperature sensor. The sensor readings are displayed using an LCD. The camera feed is displayed on a TFT monitor repurposed from a car.

Log in or sign up for Devpost to join the conversation.