-
-
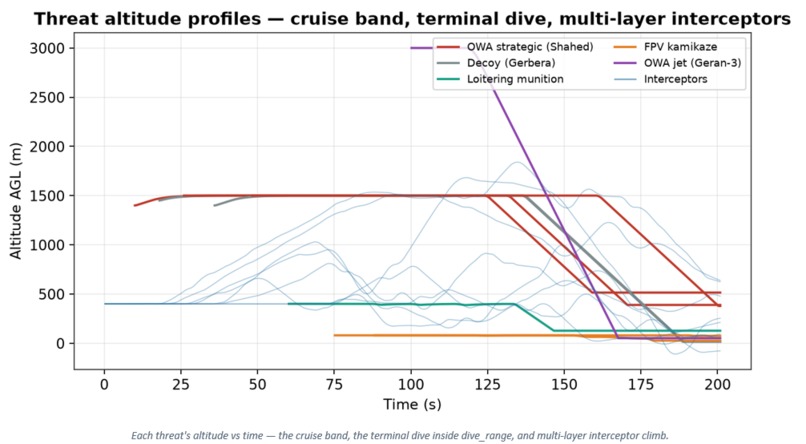
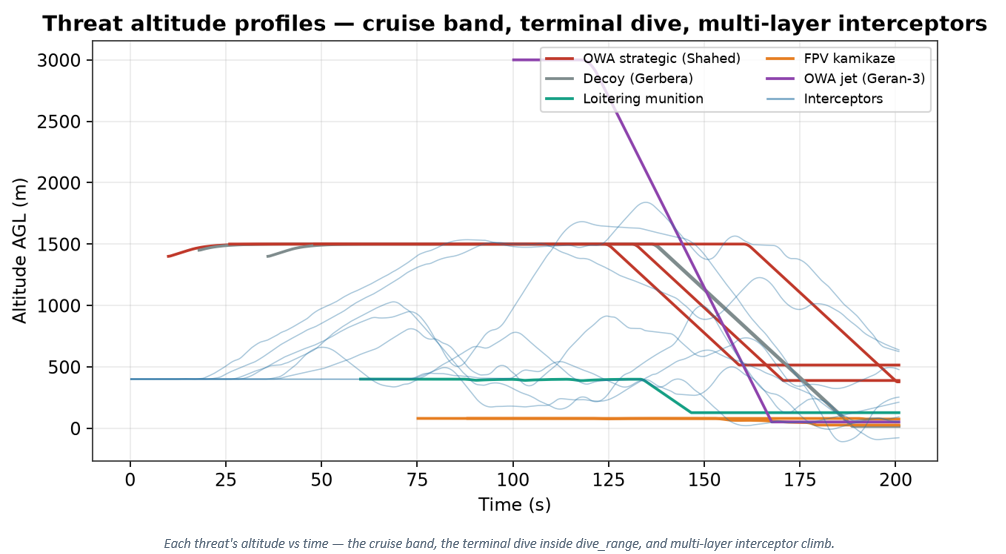
Height
-
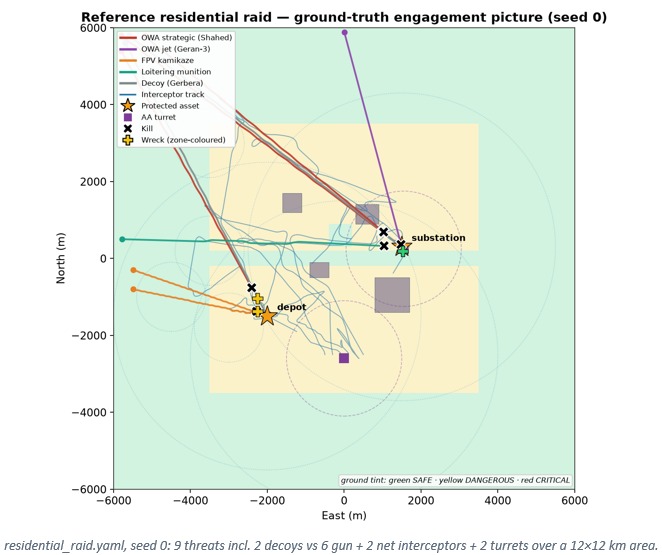
Results
-
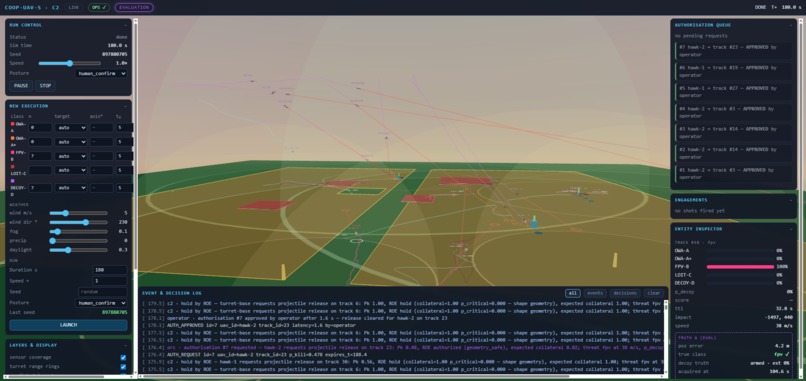
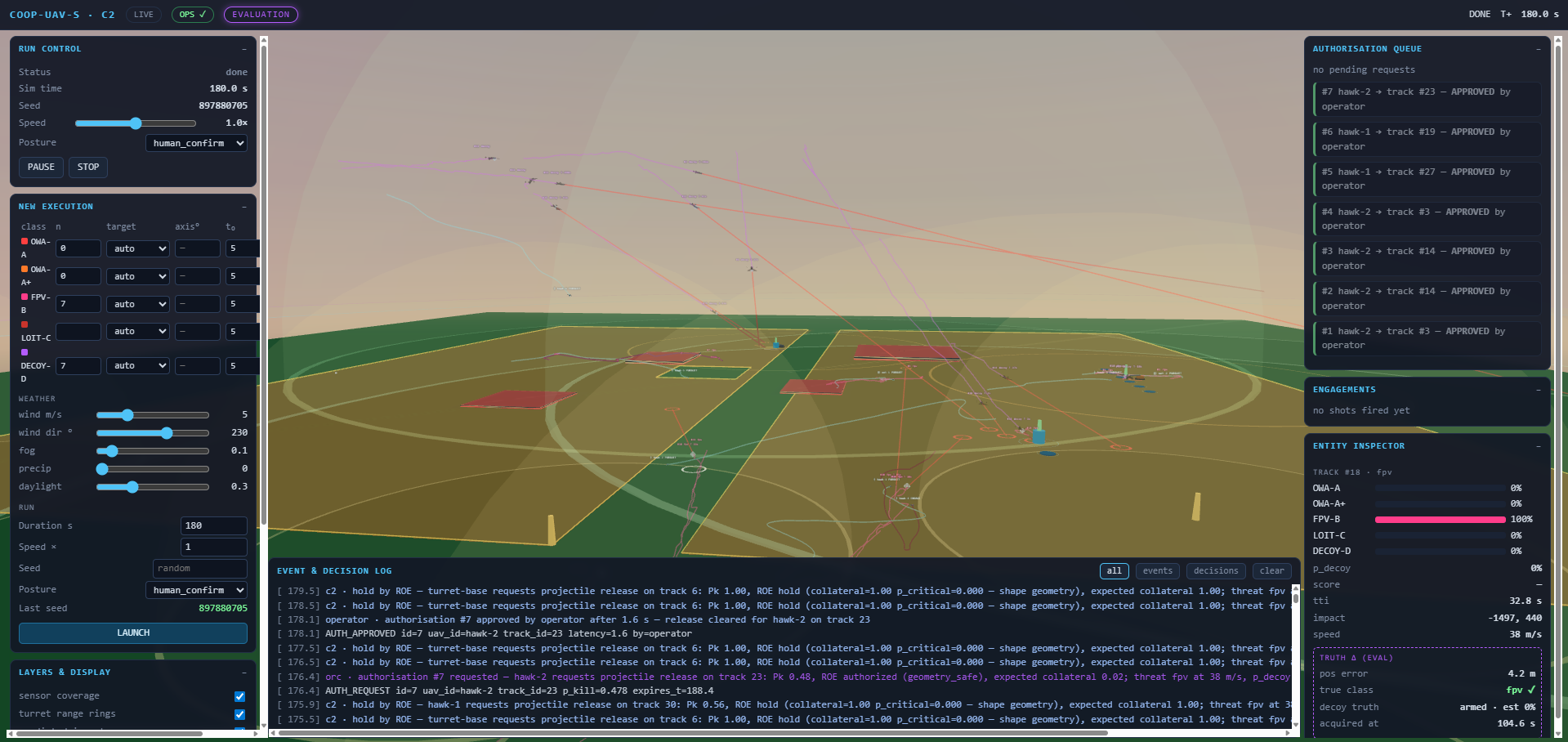
Interface
Inspiration
Based on my work experience and previous university projects I understood there was a lack in current counter-uavs defence system and it's not only technological but methodology plays a huge role.
What it does
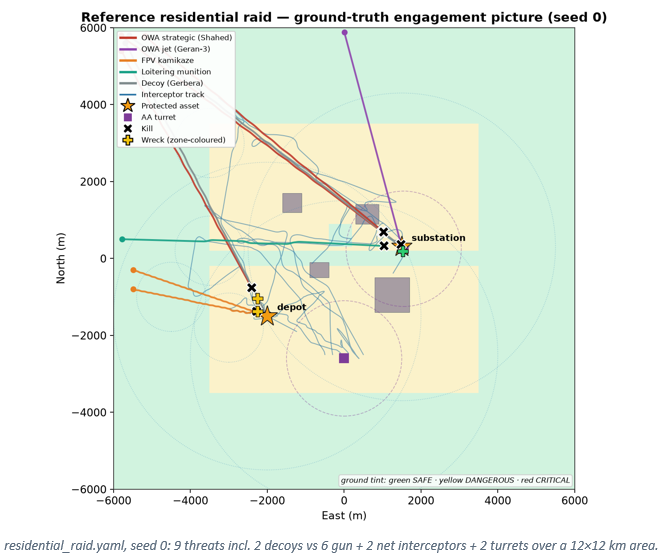
COOPerative Uav System is a layered defence for cities under constant drone attacks. The threat set is modelled on public Ukraine-conflict data - Sahaed/Geran one-way-attack (OWA) drones, Jet OWA, FPVs, loitering munitions and Gerbera decoys that deliberately share the same signature as the real thing. The system has three parts: Sentinel Drones, a sensor fused base station that detects, tracks and classifies, a fleet of low cost interceptor drones armed with EW and projectiles, all driven by an AI command-and-control layer that does threat evaluation, weapon target assignment and rules of engagement.
The core idea is that cooperation can beat speed: the C2 station posts a team of blockers on the target's flight corridor and forces it into dodging the interceptor and fall into Anti-Air turrets or other defending UAVs.
Key Capabilities:
- Debris-aware engagement: a Monte-Carlo wreckage footprint is checked against a SAFE/DANGEROUS/CRITICAL ground map before every shot; the shot is cleared, held or denied so debris never falls on an hospital.
- Detection beyond radar range: acoustic pickets + look-down sentinel radar fill the low-altitude blind zone under the radar horizon.
- Multi-sensor fusion: radar, RF, EO/IR, acoustic, and onboard seekers merged into one track picture (kalman + NN assoc).
- Decoy identification: Bayesian fusion produces a per-track decoy probability so we don't waste ammo.
- Battery management & cycle: state-of-charge tracking, low-battery return to base, recharge, rearm and rejoin.
How we built it
Because the system is not fielded, validation is mathematical (exhausting the threshold crossings in configuration space), statistical (Monte-Carlo stability across seeds), and oracle-based (cross-checking flight dynamics against established references). It rests on a deterministic, seeded simulator: all randomness flows through a single RNG registry with named per-component streams consumed in a frozen tick order, so a given seed reproduces a run exactly — run_once() == run_once() is asserted even on the complex urban scenario with occlusion, sentinels and debris.
The whole simulator is pure Python, message-driven pub/sub system shaped exactly like ros2 topics. Every component: each sensor, the fusion node, the C2, the UAVs, ecc is simulated independently and passing messages on a bus (Software in the loop) and tests are build to prove compliance with DO-178C Level B HAL.
The simulator include physics: each interceptor has its own flight controller/EKF, at high rate over a rigid-body, motor, battery models, real sensors physics simulation and fidelty is checked by cross-validating the flight dynamics against external oracles (RotorPy and ArduPilot SITL) and gated by pytest suite plus seefed monte-carlo runs.
Challenges we ran into
Decoys are invisible to RF by design, we had to put discrimination onto EO/IR + kinematics. Jet OWA is 2 times faster than our UAVs and enters radar range very late, that pushed the defence capabilities.
Accomplishments that we're proud of
Complete SIL simulations, not a game, a DO-178C compliant system that is ready to be tested on a real hardware system.
What we learned
That cooperations can beat speed and autonomous perception + sensor fusion increases defence capabilities by a lot.
What's next for COOPUS
Real world testing on physical UAVs, porting on ROS2/PX4 (ready by design). C2 AI model continuous improvement by training on better hardware.
Built With
- claude
- python
- scaleway
- windows-10

Log in or sign up for Devpost to join the conversation.