-
-
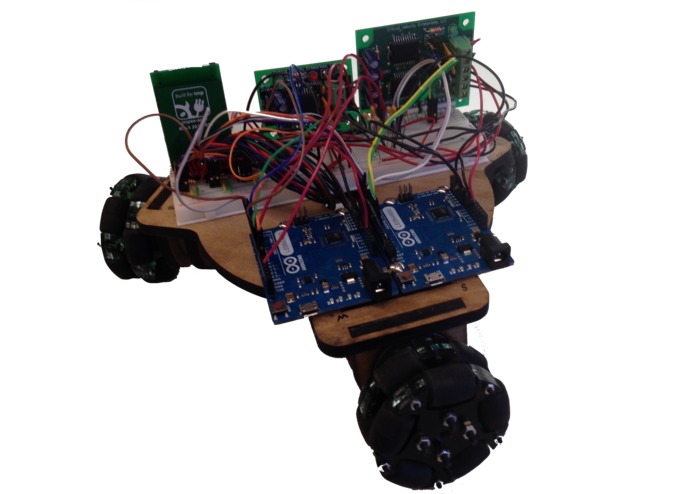
Full image of the robot
Our robot will be controllable wirelessly and will be able to drive in all degrees of freedom in the 2D plane. It will be controlled via WiFi using the Electric Imp chip.
A small, friendly robot that can be controlled or can move around autonomously.
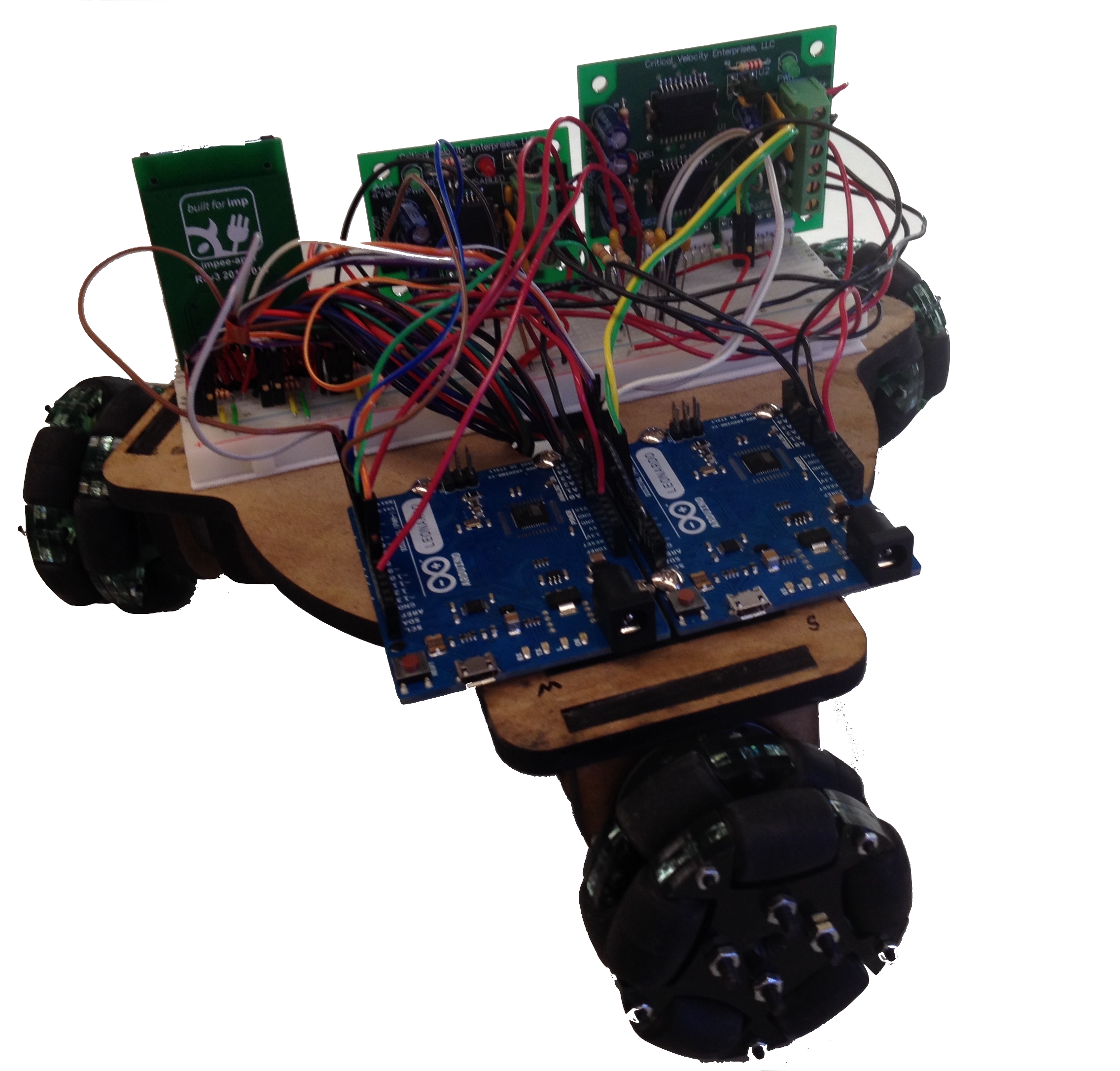
Full image of the robot
Our robot will be controllable wirelessly and will be able to drive in all degrees of freedom in the 2D plane. It will be controlled via WiFi using the Electric Imp chip.

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.