Inspiration
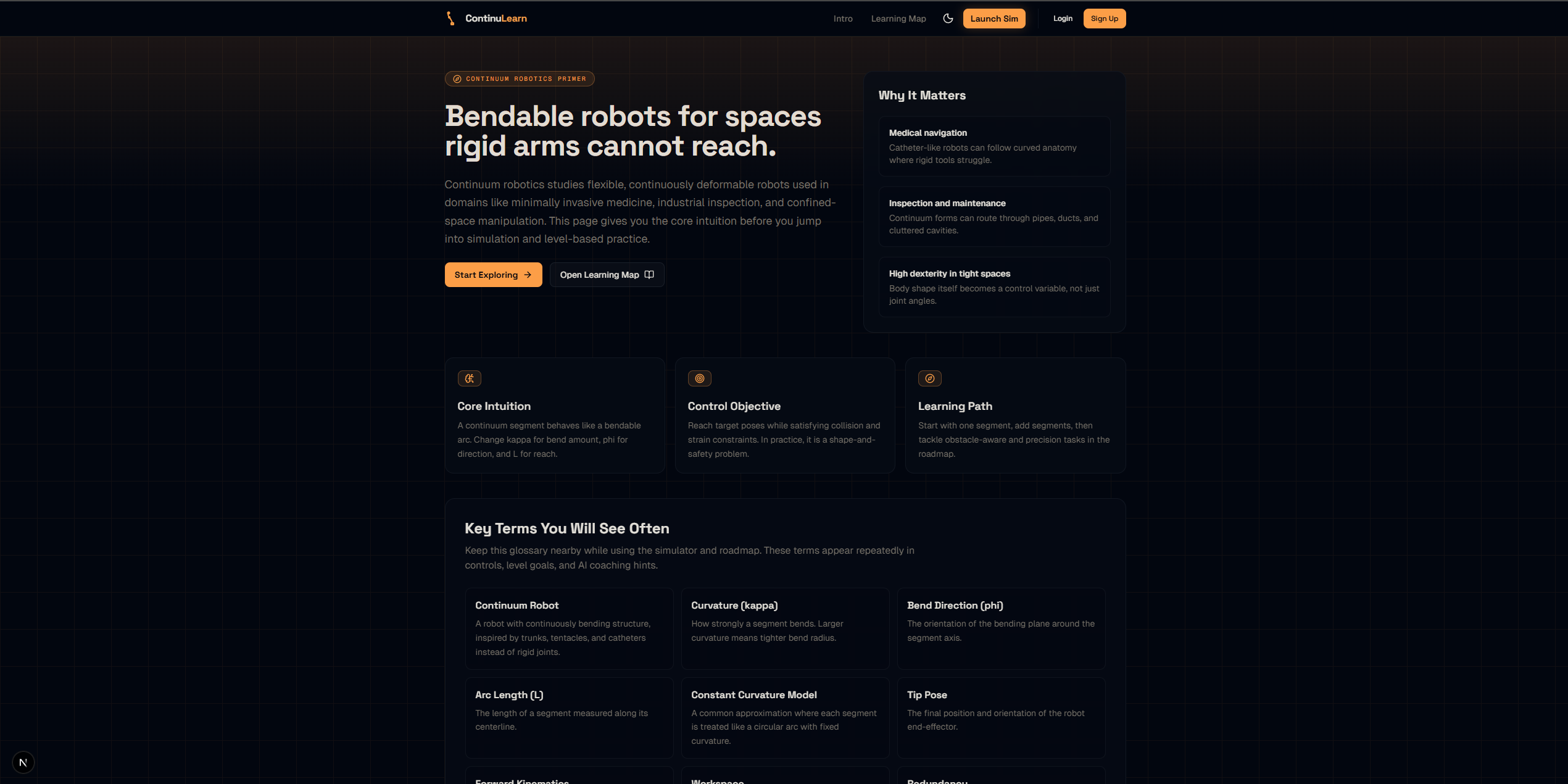
We built ContinuLearn because we love robotics and wanted to make continuum robotics accessible beyond a small niche. Most people learn rigid-link robots first, while continuum systems (catheter-like, trunk-like robots) stay hard to access. We wanted to turn that gap into an interactive learning experience.
What it does
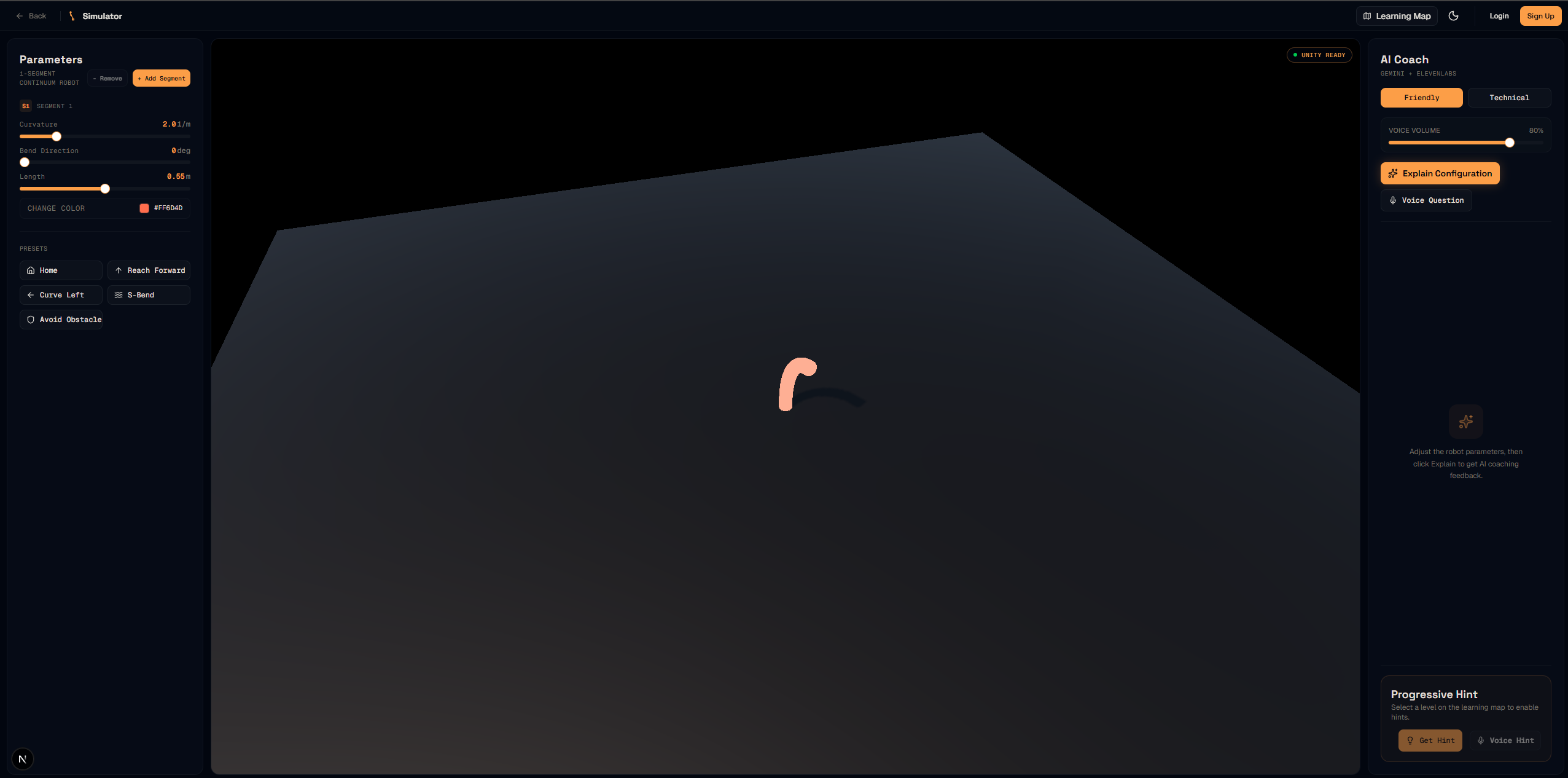
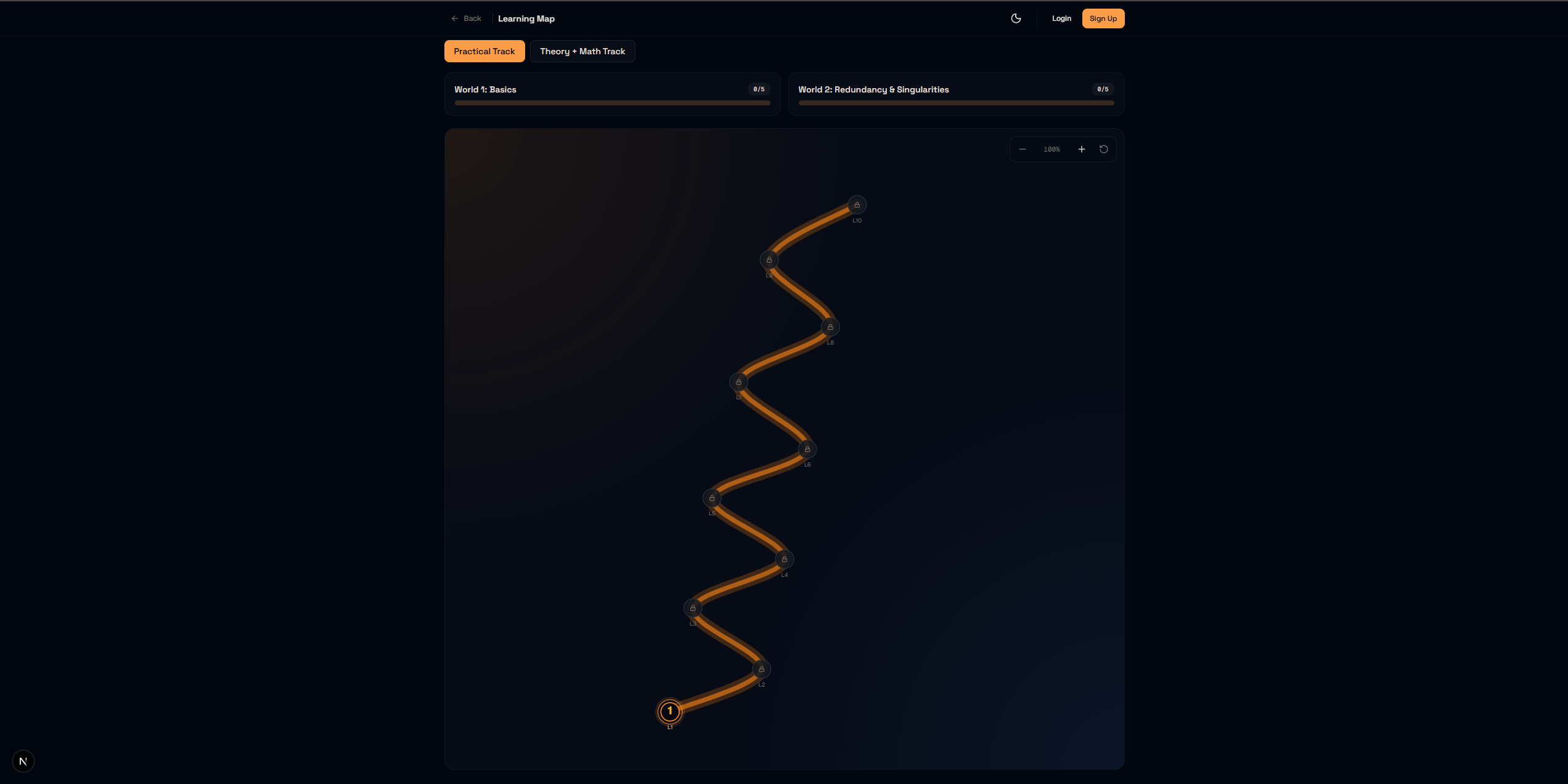
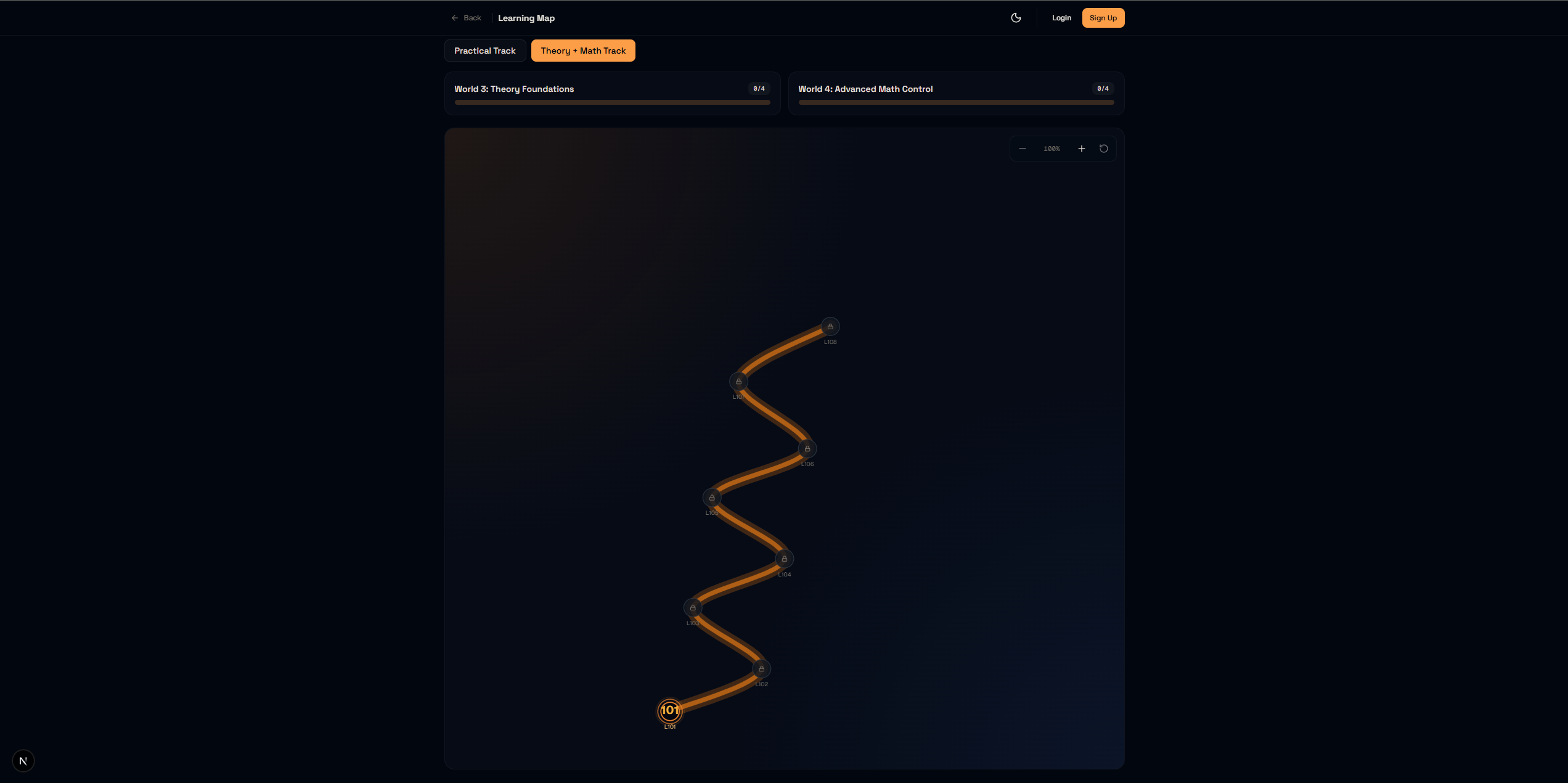
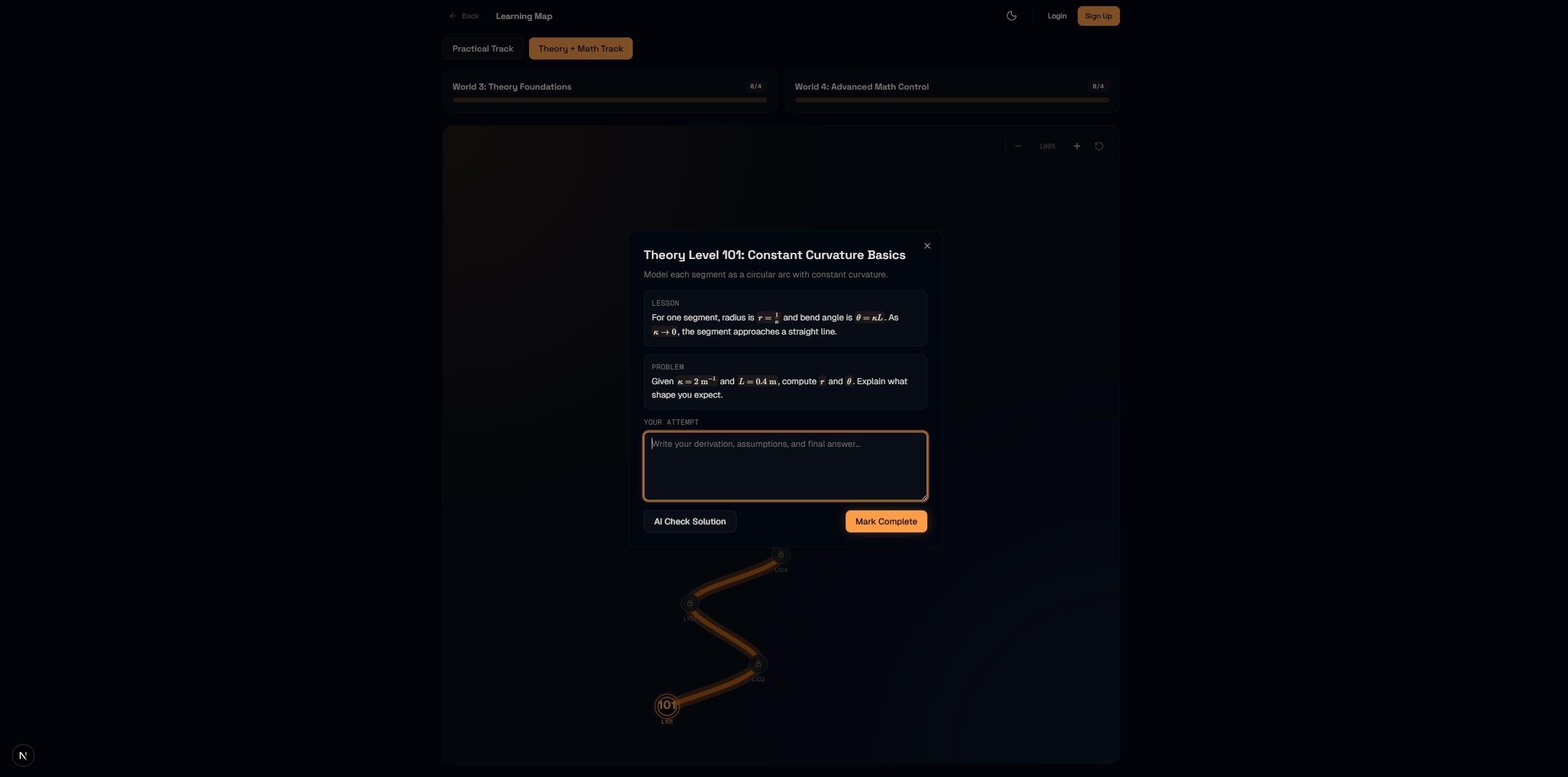
ContinuLearn helps users explore continuum robotics through a gamified roadmap and live simulator.
Users learn by adjusting key parameters like curvature, bend direction, and segment length, then validating their understanding through challenge checks.
For example, a segment is modeled with constant curvature ideas such as:
- Bend angle: $$\theta = \kappa L$$
- Radius: $$r = \frac{1}{\kappa}, \kappa \neq 0$$
So users can connect intuition with math and behavior in real time.
How we built it
We built a web app with:
- Next.js + React for the frontend experience and roadmap flow
- Unity + Blender for the 3D continuum simulation and custom robot assets
- Unity WebGL to embed the simulator directly in the site
- AI coaching APIs for level hints, explanations, and voice-assisted support
- SQLite + auth scaffolding for persistence and user progress
We designed a level system where users unlock progress by actually solving simulator tasks, not just reading content.
Challenges we ran into
One of the hardest parts was designing custom continuum robot parts and making them work together correctly in simulation.
We also faced challenges with:
- Unity rendering/setup issues (URP and WebGL pipeline details)
- Getting WebGL build integration, paths, and headers correct in the web app
- Bridging frontend controls to Unity runtime behavior reliably
- Keeping roadmap UI/UX smooth and modular as features expanded
Accomplishments that we're proud of
- Building a working pick-and-place robot demonstration
- Shipping a full web product around a niche robotics domain
- Creating an accessible learning experience that combines simulation, roadmap progression, and AI coaching
- Getting math/voice-aware feedback integrated into the learning flow
What we learned
We learned a lot about end-to-end robotics product development:
- Unity + Blender workflows for custom simulation assets
- Deploying Unity projects to the web via WebGL
- Integrating real-time simulation with a modern web stack
- Designing learning systems where validation is interactive and measurable
What's next for ContinuLearn
- Procedurally generated levels with obstacle-rich environments to highlight continuum robot advantages
- Dual-robot roadmap scenarios focused on coordinating two continuum robots
- More advanced singularity/redundancy lessons with adaptive coaching
- Deeper personalization based on user progress and error patterns

Log in or sign up for Devpost to join the conversation.