
Inspiration
Our inspiration sparked from a conversation with Nicholas Gentry, the head of recycling at UVA, who highlighted the significant challenges faced by recycling workers due to frequent contamination and improper waste disposal. He shared that sorting recyclables is a tedious and labor-intensive process, often requiring at minimum nearly a full day to complete. Furthermore, Mr. Gentry noted the concerning trend of an increasing percentage of contaminated or unclean recycling bags compared to clean ones. This problem is exacerbated by many individuals, particularly college students, who show minimal concern or understanding about proper recycling practices. This widespread lack of awareness leads to increased workloads, reduced recycling efficiency, and frustration among workers, motivating us to explore solutions that encourage better waste management behaviors.
What it does
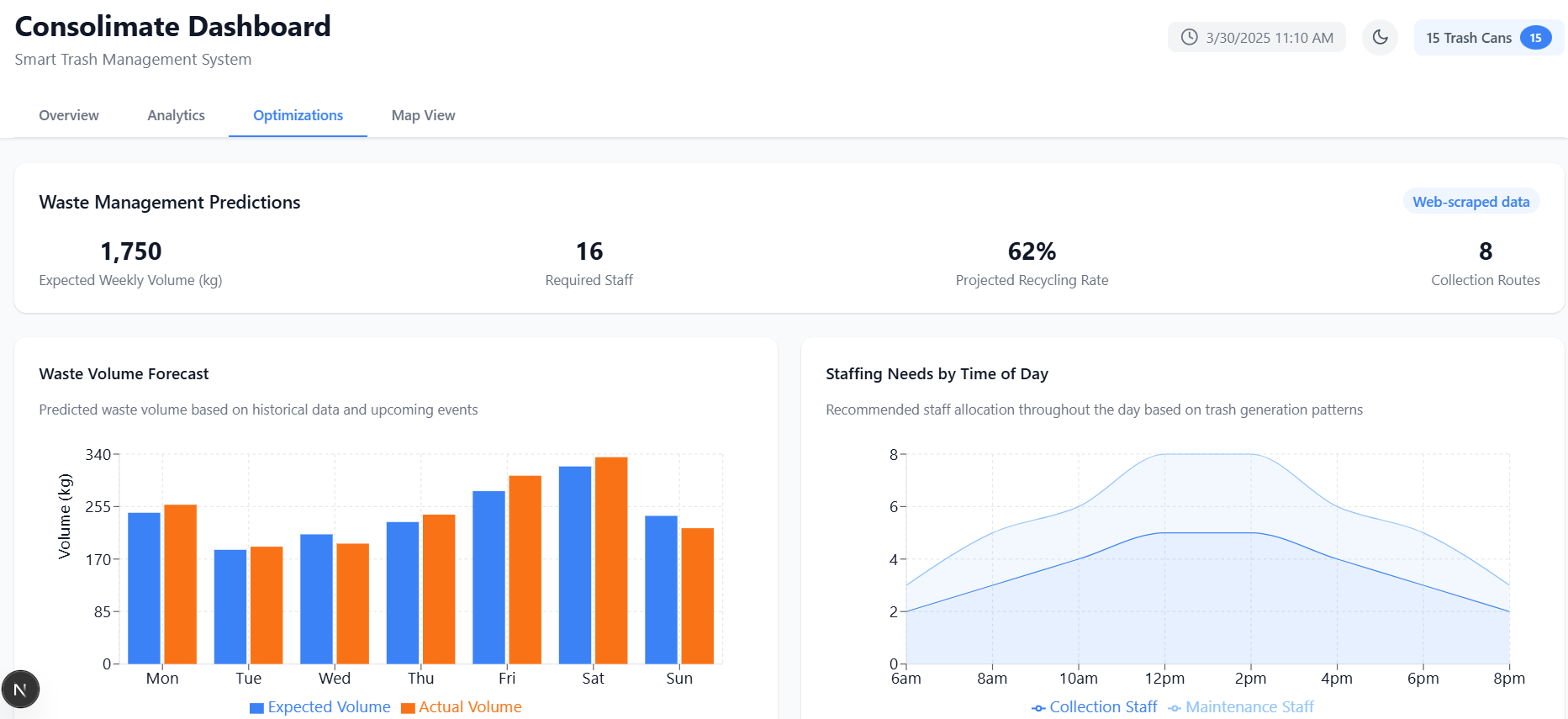
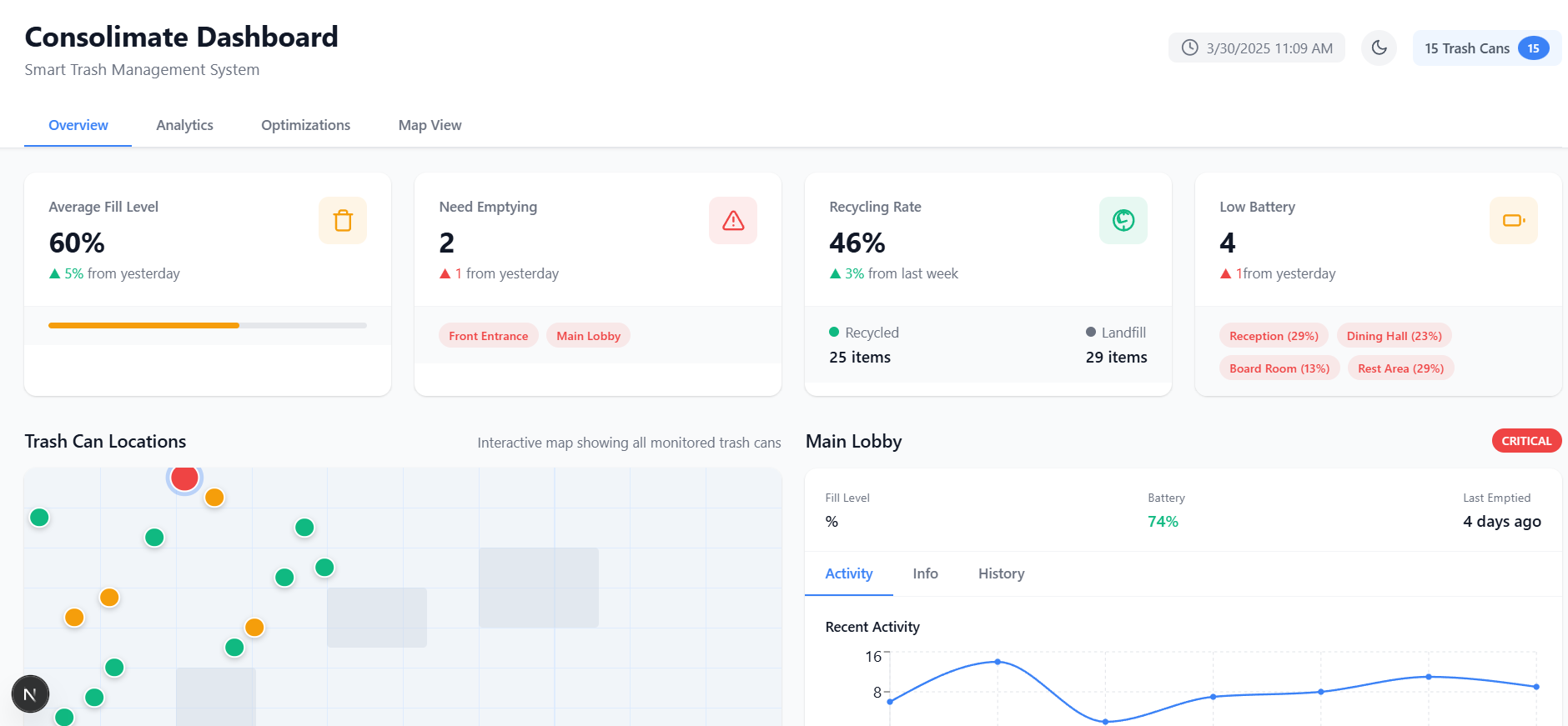
Our solution is an automated trashcan system that intelligently sorts waste into recyclable and non-recyclable materials. The trashcan features an interactive front interface that clearly displays how full it is, helping users and maintenance staff easily monitor its status. Additionally, we developed a companion website where multiple trashcans can be tracked in real-time. This platform provides valuable insights such as the urgency of emptying bins based on their current volume and odor levels, their precise locations, and an event tracker to predict increased waste generation during events like football games and concerts, which typically result in higher volumes of misplaced or improperly managed trash
How we built it
We built Consolimate through a combination of hardware and software both intertwined and working seemlessly together to create a unique and creative approach to solve recycling processes.
The hardware part involved creating a "smart" trash can that identified and sorted objects into recycle or trash based on the object and there composition. The object was detected using a logitech usb webcam which detected and classified the object. Once the detection and classification was finished, the object was dumped into either the trash or recycle bin using a lever attached to a stepper motor. The stepper motor was controlled via an arduino and A4988 motor controller. The arduino recieved the signal through the main computing unit which was the Raspberry Pi 4. The Raspberry Pi 4 connected the webcam, the LED display to display relevant information about the items in the bin, its volume, etc and a direct usb connection to the arduino to send data to run the motor.
The software part of our system was composed of two parts. The first part controlled all the relevant hardware. We ran a python based opencv segmentation model on the logitech webcam that identified when relevant items were dumped into the trash can. This was then sent into a OpenAI api which determined what the object was and whether it was recycling or trash can. This data was then sent to a custom python GUI displayed on the LED panel at the front of the web page. It was also sent via usb connection to the arduino, The arduino, based in C++, recieved in the input and then translated this into a motor controller, allowing it to control the direction of the motor to determine which way to dump the item. This involved all the code relevant to the hardware. The second part of our system included a web based dashboard. This web based dashboard displayed all things relevant to these "smart" trash cans at scale. Meaning it can display the location of all the trash cans, when they have been emptied/refilled, what they contain, and various other relevant trash and recycle statistics. It can also connect to and view and individual trash cans components. It is built on a Next JS frontend, combined with a FastAPI backend connected to a MongoDB database which contains all information about the various trash/sorting cans we have. The
Challenges we ran into
Throughout the development of this project, we faced several significant challenges, as it was our first experience integrating hardware into a hackathon project. Initially, we struggled to connect the motor to the Raspberry Pi and to establish WiFi connectivity, ultimately cycling through three different Raspberry Pis before finding a reliable one. Additionally, we encountered unexpected difficulties when designing and constructing the trashcan itself, particularly in positioning the motor and attaching a durable spinning platform capable of handling the trash load. On the software side, creating a functional and user-friendly GUI, effectively utilizing a webcam for object detection, and controlling the motor via an Arduino presented further obstacles
Accomplishments that we're proud of
We successfully combined hardware and software components for the first time, creating a functional prototype that addresses a real-world environmental issue. Our ability to collaboratively troubleshoot complex problems, persist through setbacks, and innovate solutions under pressure demonstrates our team's strength, adaptability, and commitment to making a positive impact.
What we learned
Through this project, we learned valuable technical and practical skills, including integrating hardware components with software, troubleshooting hardware-software interactions, and effective teamwork under tight deadlines. Moreover, we gained deeper insights into recycling practices and the importance of user-friendly interfaces to encourage sustainable behavior, significantly enriching our perspective on technology-driven environmental solutions.
What's next for Consolimate
Moving forward, Consolimate aims to focus on scalability, ensuring that our solution can be effectively implemented across various campuses and public spaces. Our next steps involve refining our hardware to enhance reliability and efficiency, expanding software capabilities for better real-time analytics, and improving the user interface for wider user adoption. We plan to establish strategic partnerships and conduct pilot tests to validate our system in real-world environments, ultimately aiming to create a robust, scalable solution that meaningfully contributes to global sustainability efforts.
Built With
- arduino
- cv2
- fastapi
- mongodb
- next.js
- openai
- pygame
- python
- raspberry-pi

Log in or sign up for Devpost to join the conversation.