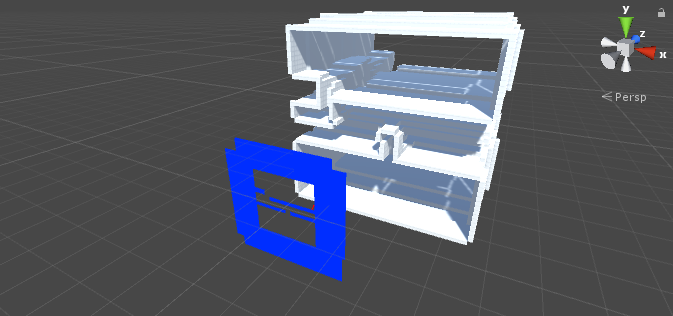
-
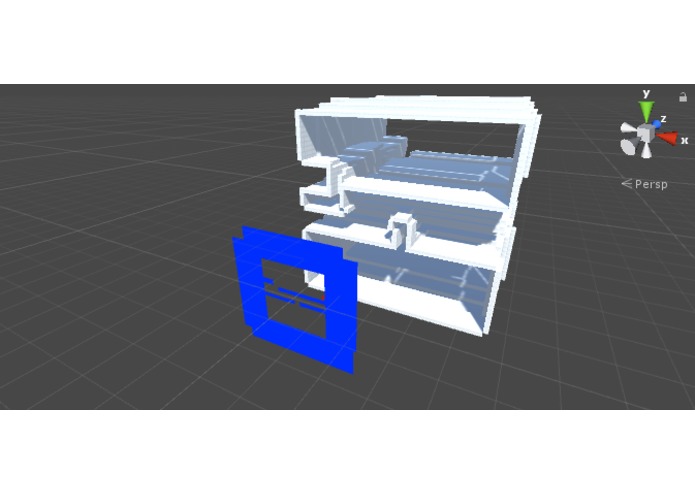
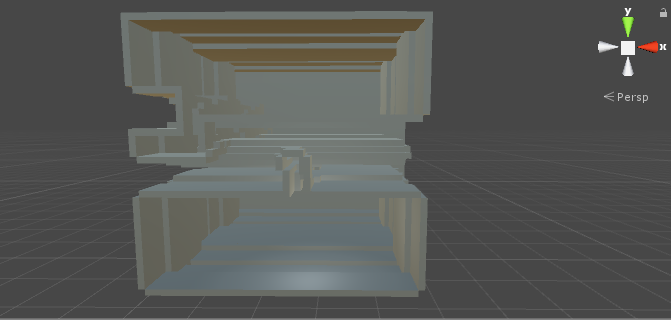
The generated 3D maze from the demo motion problem
-
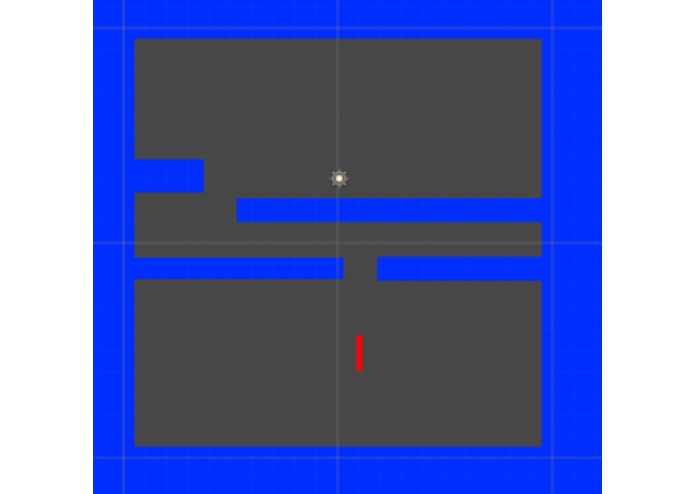
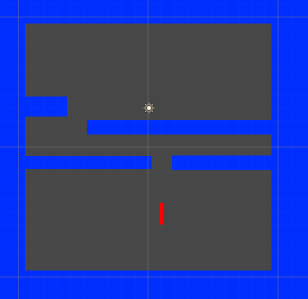
The simple robotic motion problem that is used as a demo
-
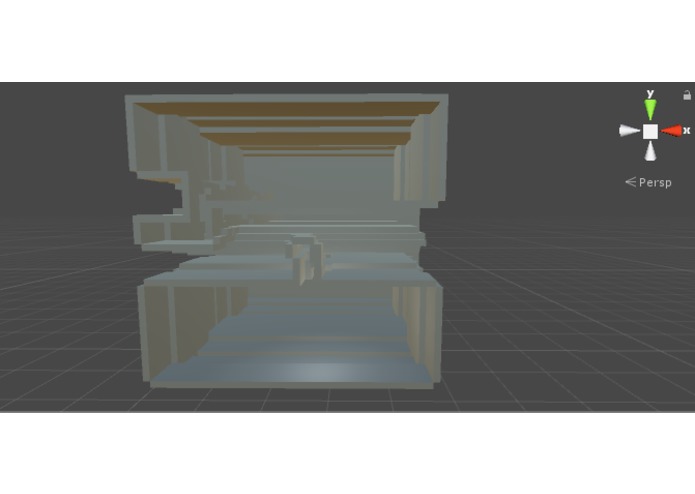
Starting to play around with lighting and game functionality
ConfigSpacesUnity
Generating 3D configuration spaces from 2D robotic motion problems using Unity
What?
This is a Unity project that generates a 3D configuration space in normalized coordinates from the (x,y,\theta) coordinates of a 2D robotic motion problem. Everything is very much brute force, with very little optimization.
How?
Simply open the repo in Unity and you'll see the demo I've set up. You should be able to generate a configuration space by playing the demo.
To create your own configuration space based on a new problem, simply attach the
Generate script to your 2D robot, configure the public variables and make sure
all your 2D obstacles are tagged as Obstacles. You should see the space be
generated rapidly (the FixedUpdate timestep is set very low).
When?
This was made during local hack day, after I'd gotten everyone setup with wifi. I am still very much a Unity beginner, so take this with a truck of salt.


Log in or sign up for Devpost to join the conversation.