-

CompMobilSim Official Logo: Real-time Multi-Agent Simulation Engine
-
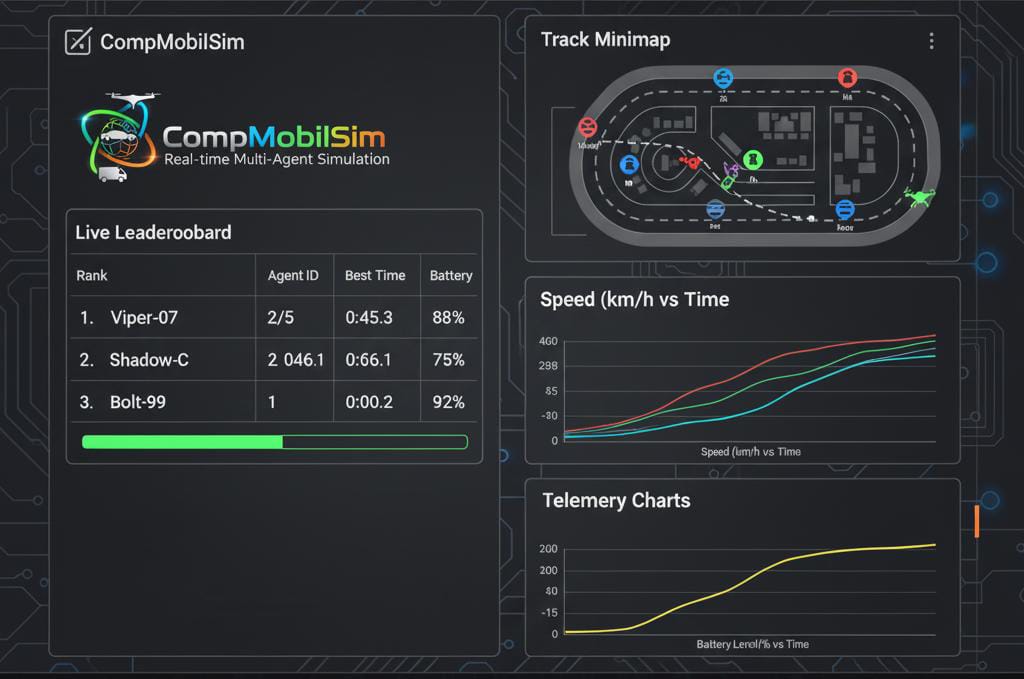
CompMobilSim Live Dashboard: Real-time Leaderboard, Track Minimap, and Telemetry Analytics
-

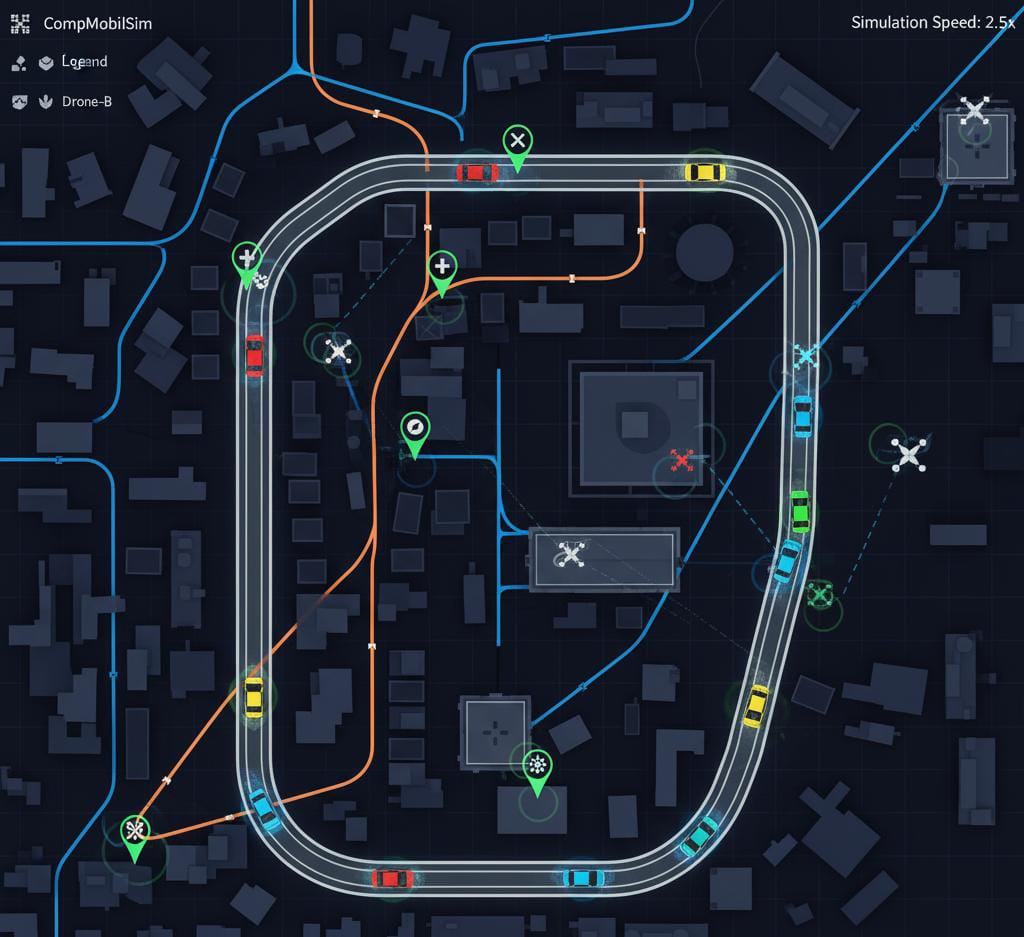
CompMobilSim 2D Track Visualization: Multi-Agent Movement in a Dynamic Urban Environment
-
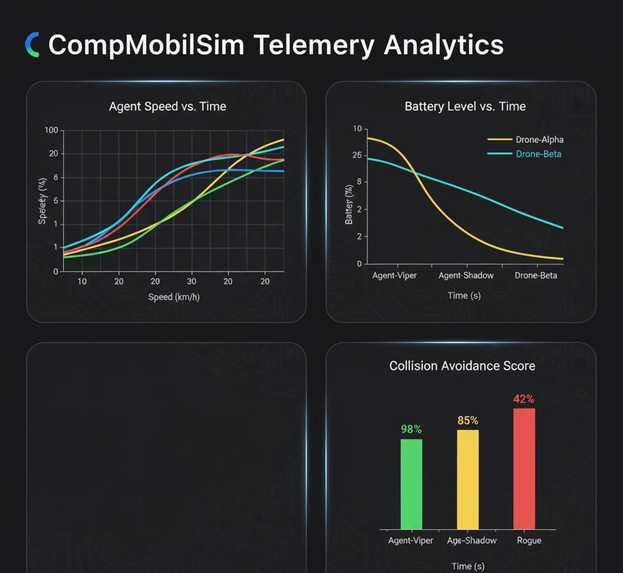
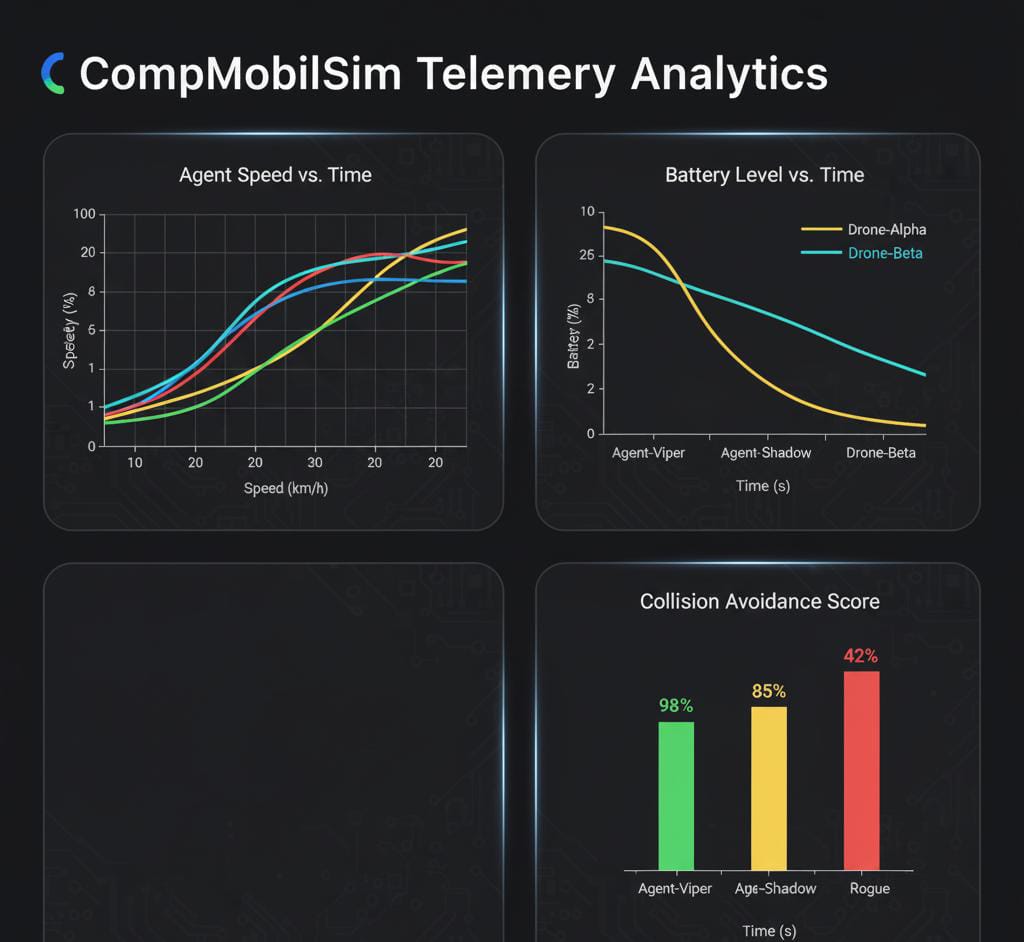
CompMobilSim Telemetry Analytics: Agent Performance, Battery, and Collision Metrics

Inspiration
The rise of electric racing, drone competitions, and autonomous delivery systems inspired us to create CompMobilSim — a lightweight, real-time simulation tool that helps organizers, developers, and researchers analyze mobility events, optimize AI agents, and test strategies before real-world execution.
What it does
CompMobilSim is a modular, multi-agent simulation engine that:
Models cars, bikes, and drones with configurable physics and AI behavior
Simulates laps, checkpoints, pit stops, collisions, and environmental effects
Provides live leaderboards and telemetry analytics (speed, battery, position)
Allows users to define scenarios in JSON/YAML for reproducible simulations
Supports custom AI agent plugins via Python SDK It’s useful for racing strategy, drone competitions, logistics simulations, and urban mobility planning.
How we built it
Core Engine: Python (tick-based simulation, deterministic RNG)
Agent AI API: Python SDK for integrating custom behaviors
Frontend: React + Tailwind CSS for 2D interactive dashboard
Real-time Communication: FastAPI + WebSocket for live leaderboard updates
Storage & Analytics: SQLite and Pandas for telemetry logging
Scenario Composer: JSON/YAML configuration for track, agents, and events
Challenges we ran into
Ensuring deterministic, reproducible simulation runs with the same seed
Handling hundreds of agents in real-time efficiently
Designing a plugin API that is simple but flexible for AI agents
Integrating live leaderboard and telemetry visualization with minimal latency
Balancing simulation accuracy vs performance for scalable runs
Accomplishments that we're proud of
Built a fully modular, real-time multi-agent engine from scratch
Created a Python SDK enabling easy AI agent integration
Developed a live leaderboard and 2D visualization dashboard
Made simulations reproducible and configurable via JSON/YAML scenarios
Demonstrated applicability across racing, drones, and logistics planning
What we learned
Designing a deterministic simulation engine is critical for testing strategies
Modular APIs allow rapid integration of custom AI agents
Real-time visualization and telemetry require careful performance optimization
Multi-agent systems provide insights into strategy, behavior, and decision-making
Importance of balancing accuracy, scalability, and usability
What's next for CompMobilSim:-- (Competitive Mobility Systems Simulator)
Add 3D visualization for immersive analysis
Integrate reinforcement learning AI agents for autonomous racing
Support distributed simulations for large-scale logistics scenarios
Release as an open-source toolkit for researchers and mobility startups
Expand scenario library for different vehicle types, weather, and track conditions



Log in or sign up for Devpost to join the conversation.