Inspiration
To create an autonomous robot to help carry items.
What it does
Tracks a wearable beacon on a person and follows it.
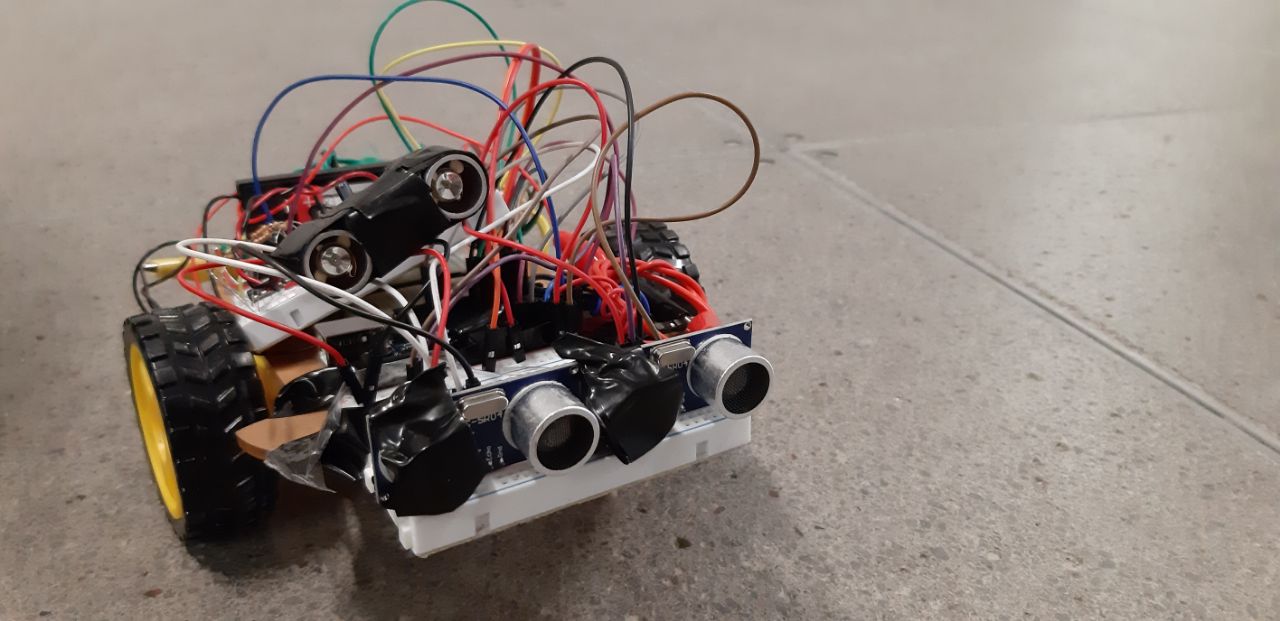
How we built it
Build an ultrasound transmitting beacon with a tranducer and arduino nano. Use 2 ultrasound range sensors to detect differential range from beacon to know direction. Manuever robot accordingly to track beacon.
Challenges we ran into
Limited range of operation due to High Dynamic Range of ultrasonic sonar. Precise clock synchronization between transmitter and receiver. DC Motor was provided without a motor controller (improvised H-bridge contoller not really effective).
Accomplishments that we're proud of
Our hard work and determination to yield working prototype
What we learned
Cost effective indoor tracking is a challenging task.
What's next for CompanionBot
Improve the motor to bear greater load
Built With
- arduino
- tranducers
- ultrasound-range-sensor

Log in or sign up for Devpost to join the conversation.