-
-
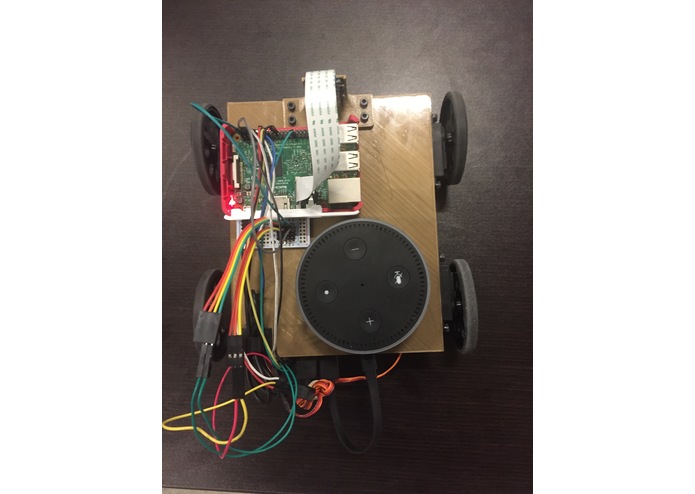
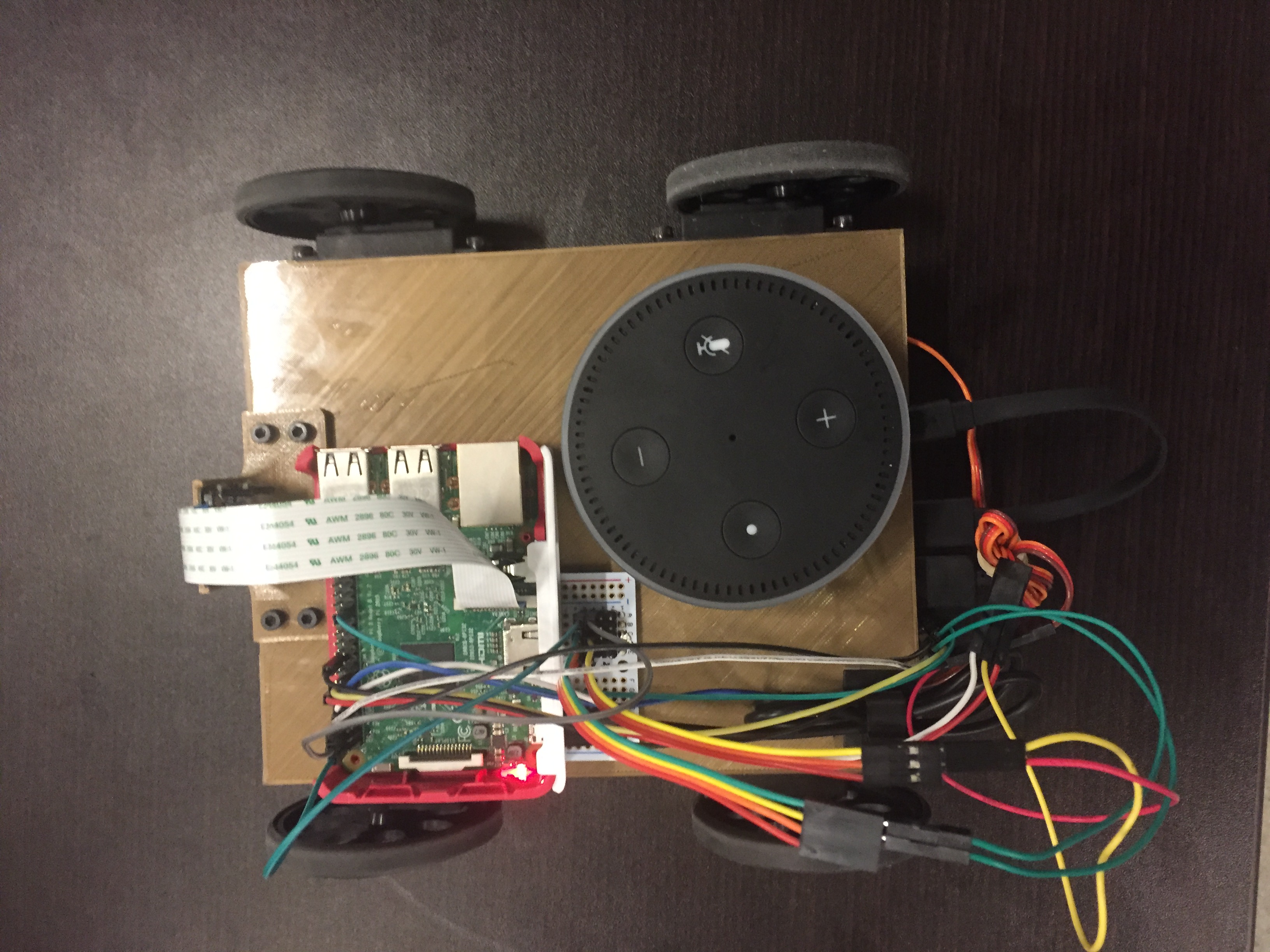
A bird's eye view
-
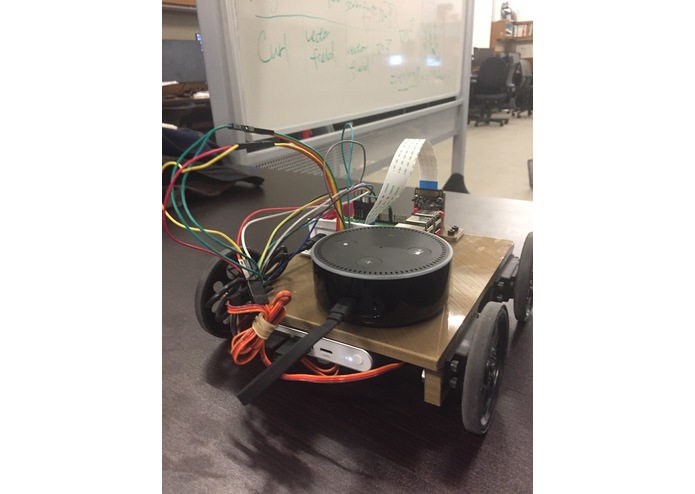
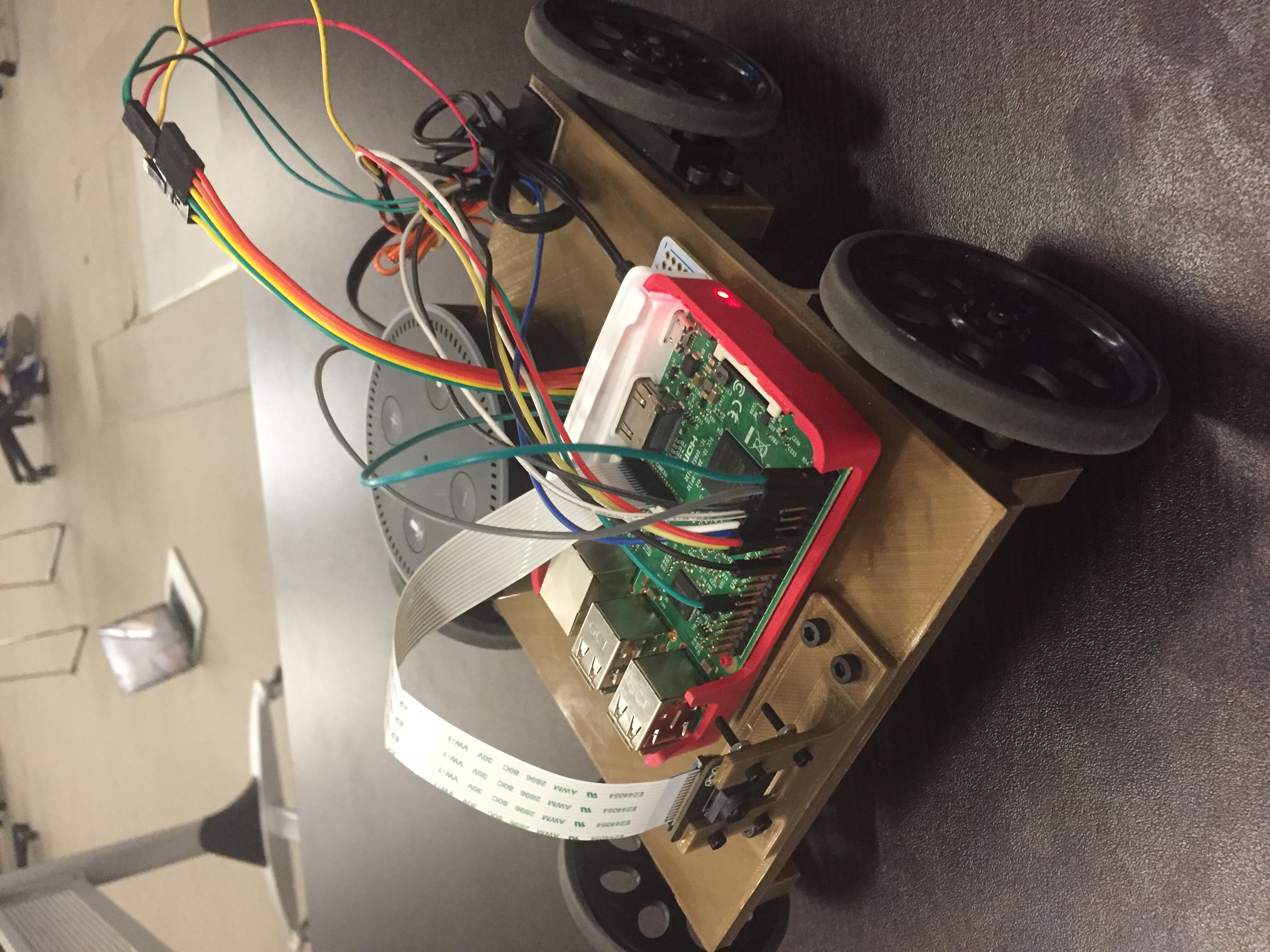
The front facing camera
-
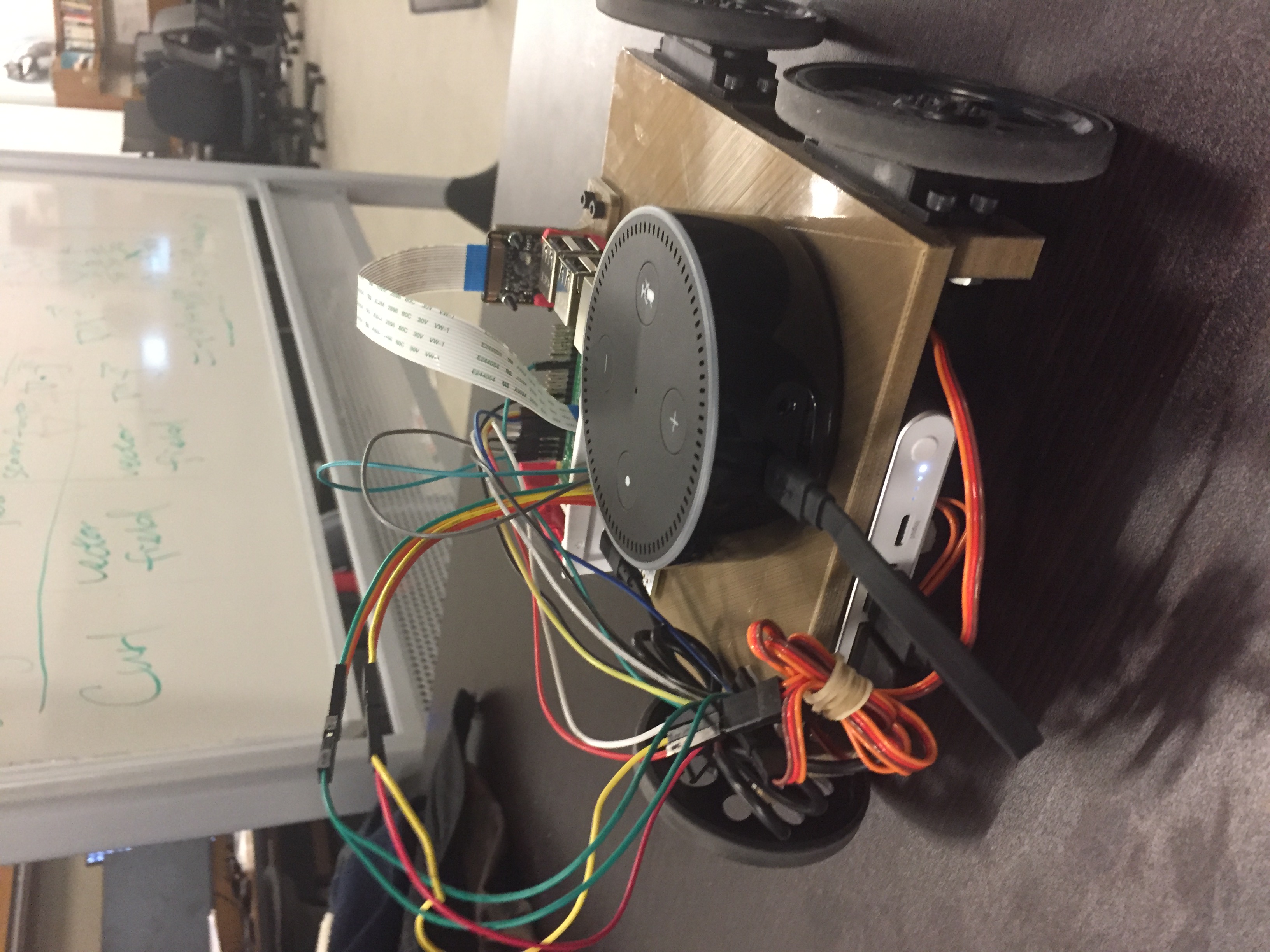
We attached the battery to the underside to conserve room on top
-
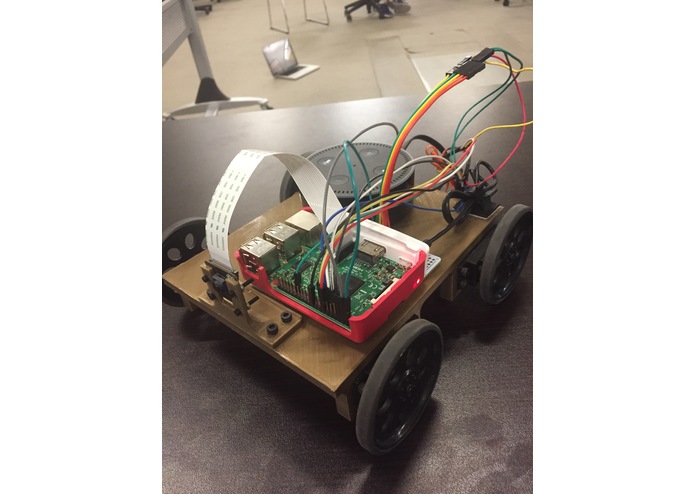
"Chase" in all of his glory
-
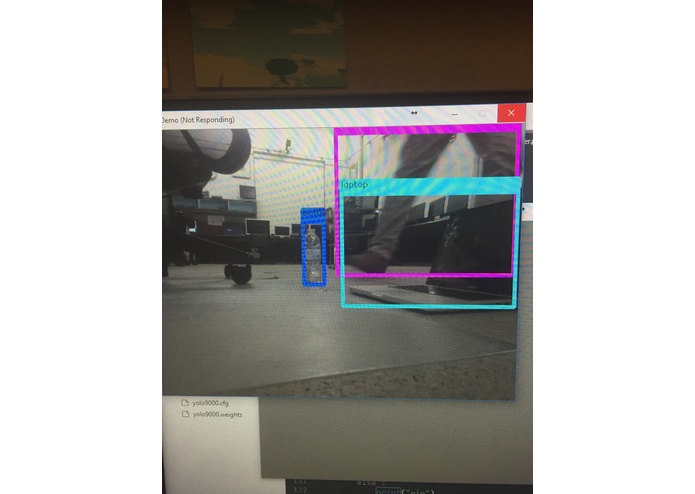
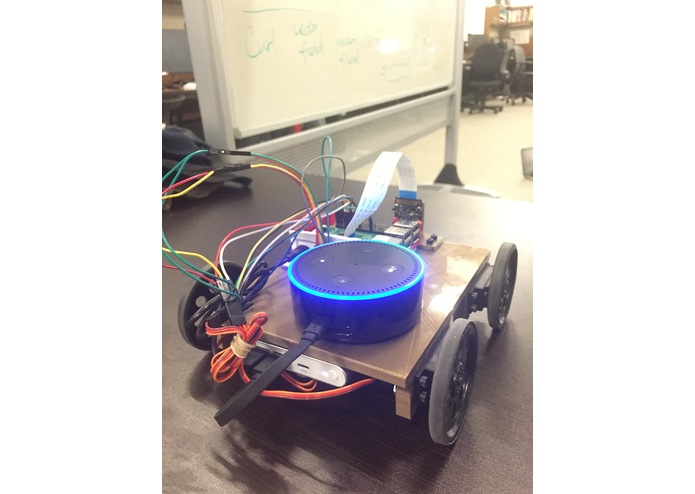
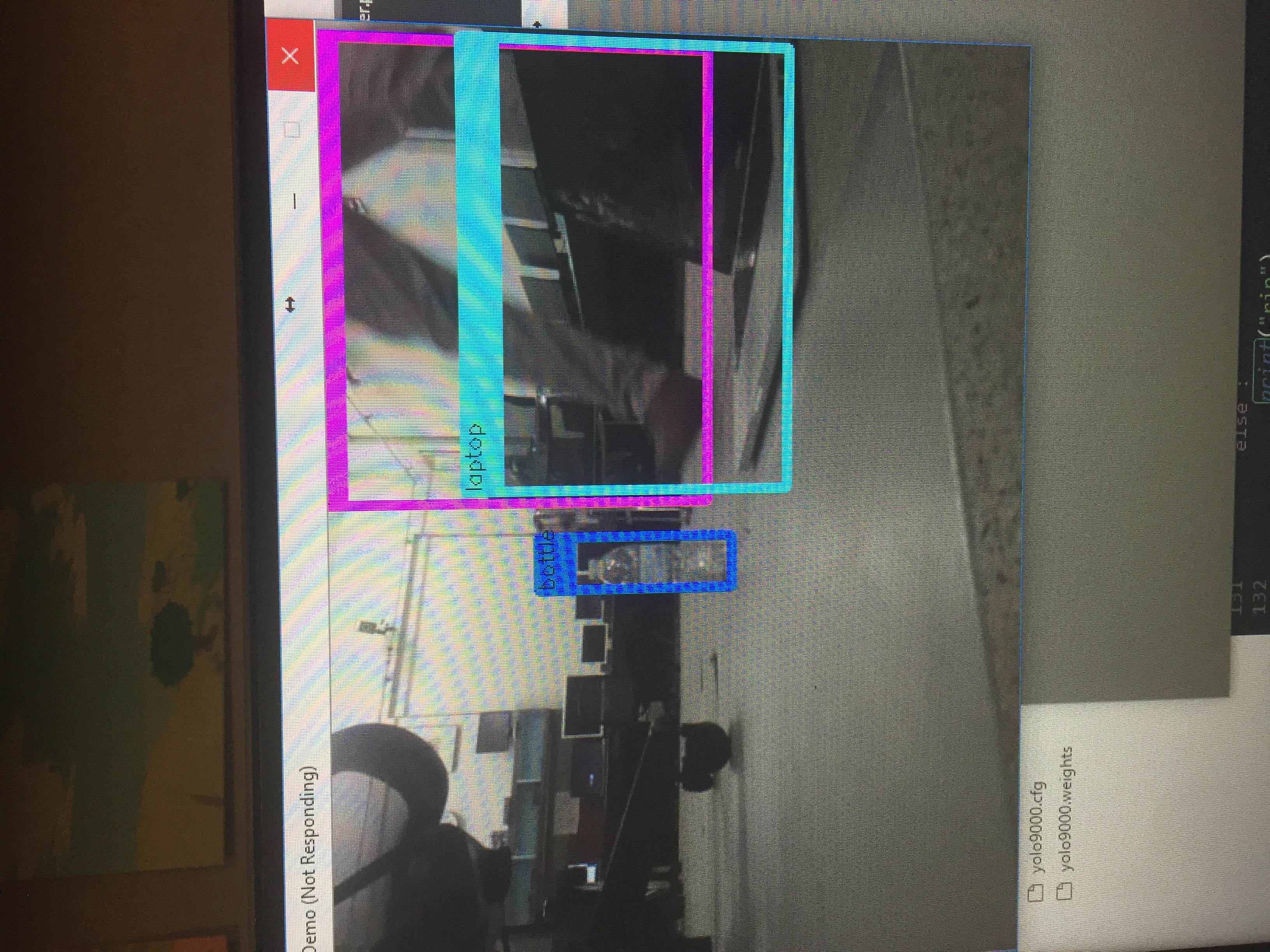
CloudChaser recognizing images

Inspiration
We wanted to pioneer the use of computationally intensive image processing and machine learning algorithms for use in low resource robotic or embedded devices by leveraging cloud computing.
What it does
CloudChaser (or "Chase" for short) allows the user to input custom objects for chase to track. To do this Chase will first rotate counter-clockwise until the object comes into the field of view of the front-facing camera, then it will continue in the direction of the object, continually updating its orientation.
How we built it
"Chase" was built with four continuous rotation servo motors mounted onto our custom modeled 3D-printed chassis. Chase's front facing camera was built using a raspberry pi 3 camera mounted onto a custom 3D-printed camera mount. The four motors and the camera are controlled by the raspberry pi 3B which streams video to and receives driving instructions from our cloud GPU server through TCP sockets. We interpret this cloud data using YOLO (our object recognition library) which is connected through another TCP socket to our cloud-based parser script, which interprets the data and tells the robot which direction to move.
Challenges we ran into
The first challenge we ran into was designing the layout and model for the robot chassis. Because the print for the chassis was going to take 12 hours, we had to make sure we had the perfect dimensions on the very first try, so we took calipers to the motors, dug through the data sheets, and made test mounts to ensure we nailed the print.
The next challenge was setting up the TCP socket connections and developing our software such that it could accept data from multiple different sources in real time. We ended up solving the connection timing issue by using a service called cam2web to stream the webcam to a URL instead of through TCP, allowing us to not have to queue up the data on our server.
The biggest challenge however by far was dealing with the camera latency. We wanted to camera to be as close to live as possible so we took all possible processing to be on the cloud and none on the pi, but since the rasbian operating system would frequently context switch away from our video stream, we still got frequent lag spikes. We ended up solving this problem by decreasing the priority of our driving script relative to the video stream on the pi.
Accomplishments that we're proud of
We're proud of the fact that we were able to model and design a robot that is relatively sturdy in such a short time. We're also really proud of the fact that we were able to interface the Amazon Alexa skill with the cloud server, as nobody on our team had done an Alexa skill before. However, by far, the accomplishment that we are the most proud of is the fact that our video stream latency from the raspberry pi to the cloud is low enough that we can reliably navigate the robot with that data.
What we learned
Through working on the project, our team learned how to write an skill for Amazon Alexa, how to design and model a robot to fit specific hardware, and how to program and optimize a socket application for multiple incoming connections in real time with minimal latency.
What's next for CloudChaser
In the future we would ideally like for Chase to be able to compress a higher quality video stream and have separate PWM drivers for the servo motors to enable higher precision turning. We also want to try to make Chase aware of his position in a 3D environment and track his distance away from objects, allowing him to "tail" objects instead of just chase them.
CloudChaser in the news!
https://medium.com/penn-engineering/object-seeking-robot-wins-pennapps-xvii-469adb756fad https://penntechreview.com/read/cloudchaser
Built With
- 3dprinting
- amazon-alexa
- open-cv
- raspberry-pi
- robot
- servo
- tcp
- yolo




Log in or sign up for Devpost to join the conversation.