-
-
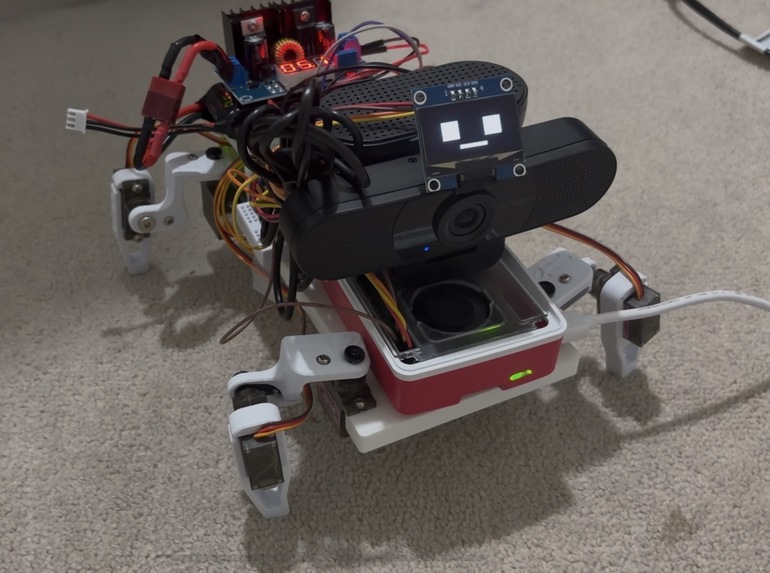
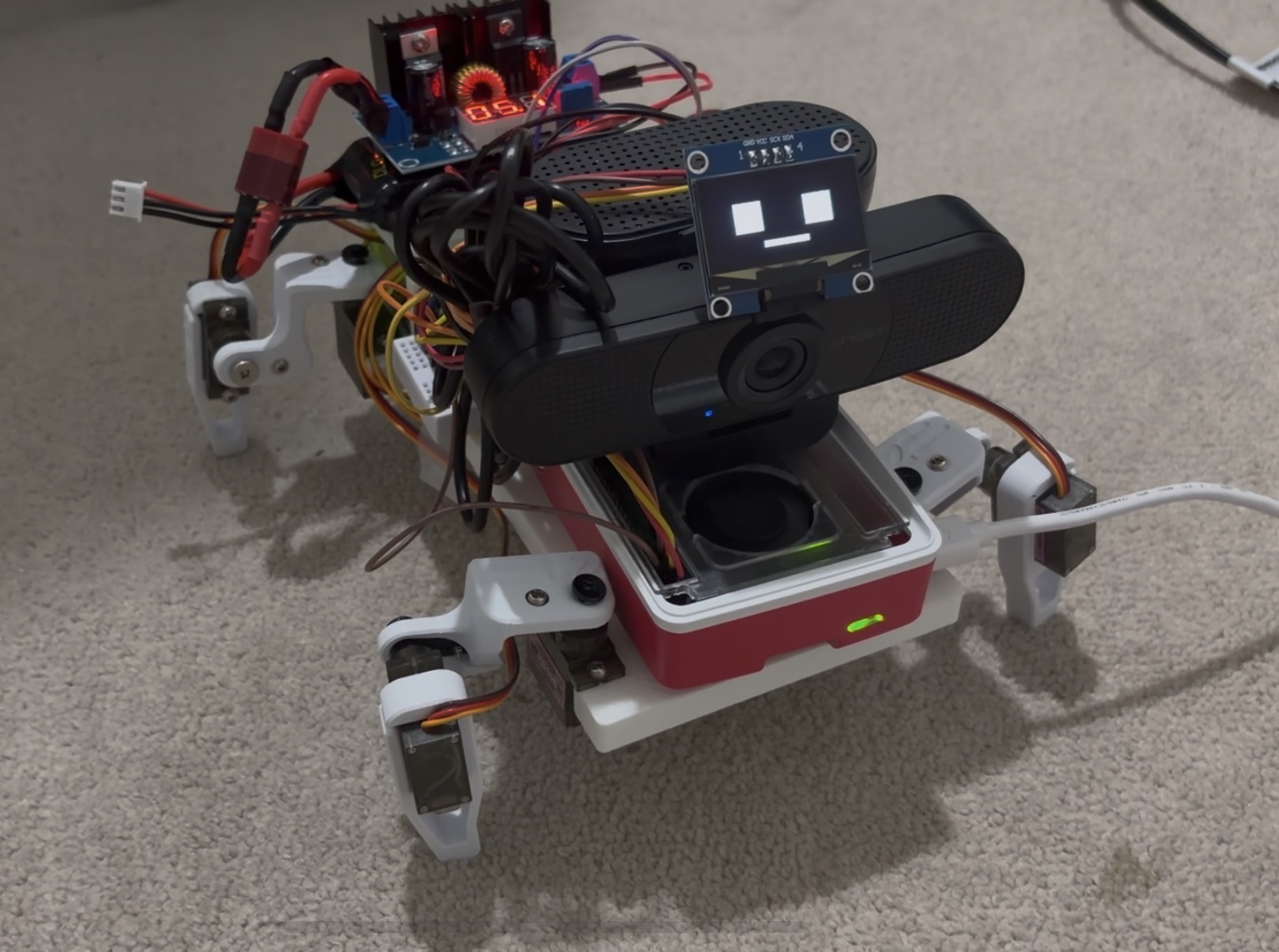
Cleo
-

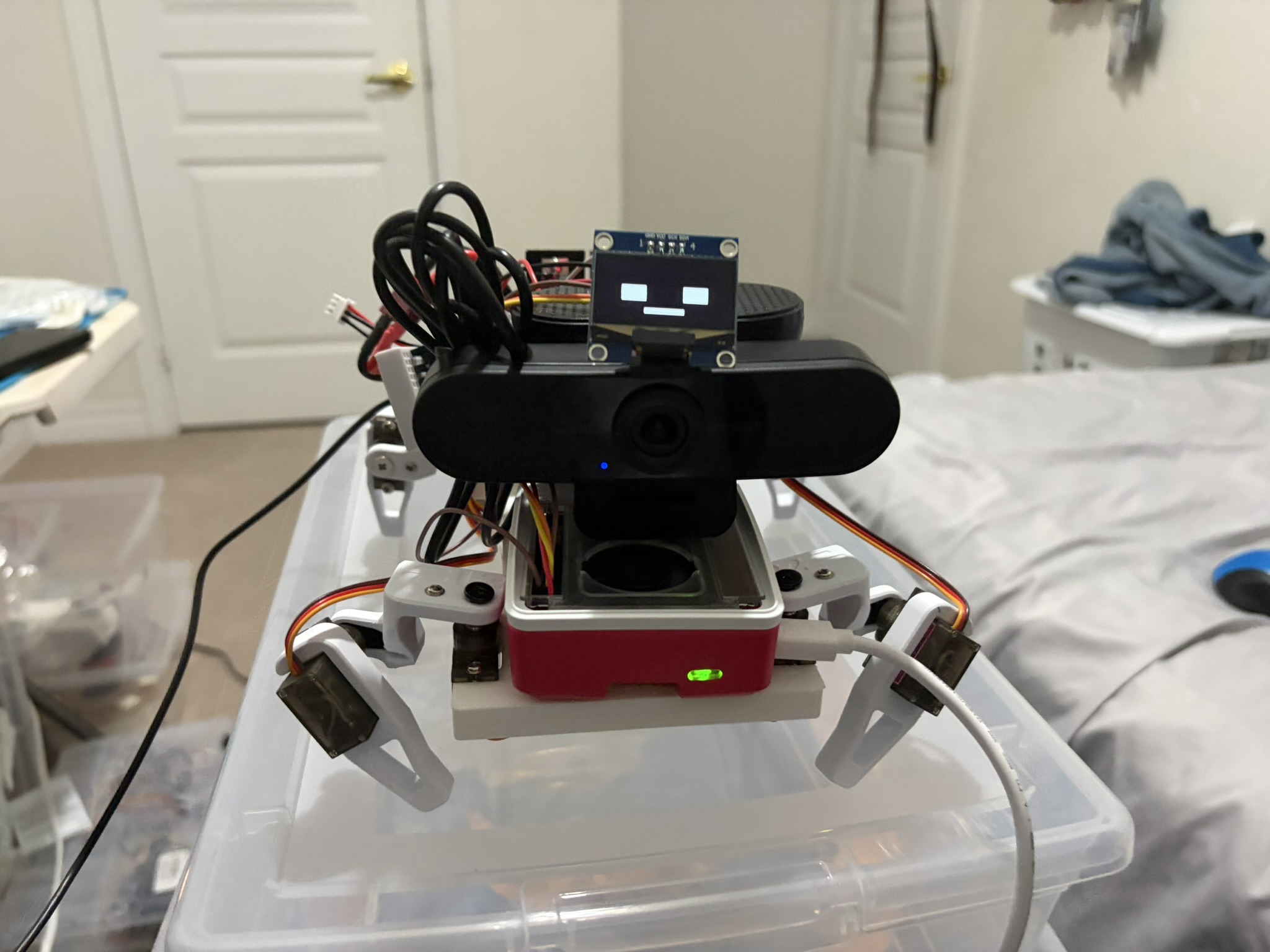
Cleo from the front
-
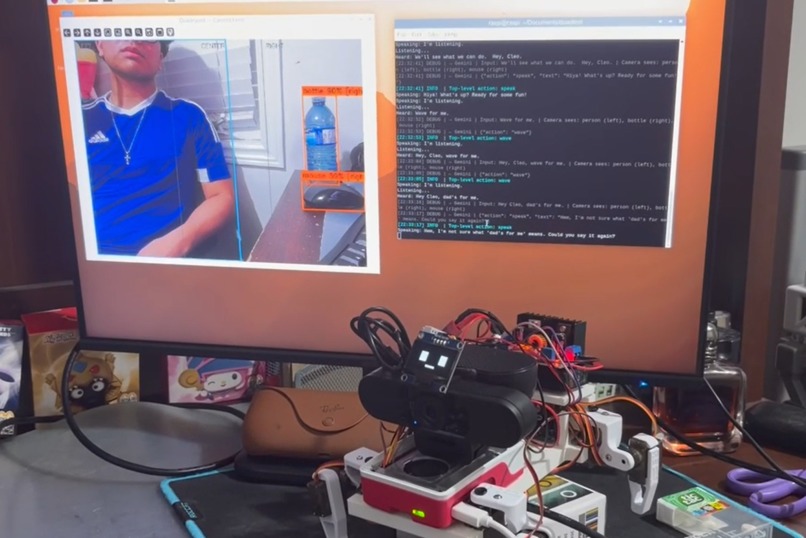
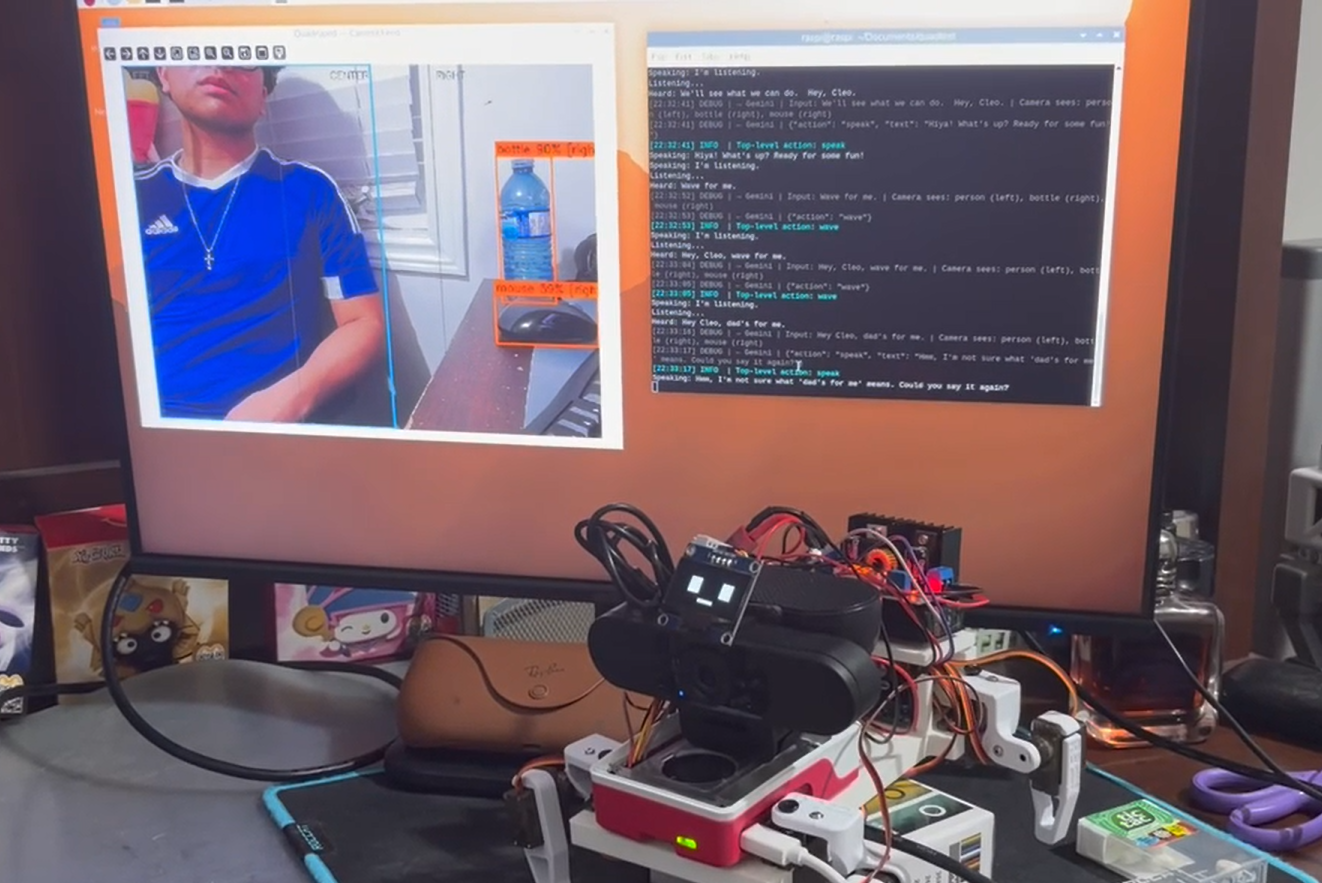
Cleo Object Detection
-
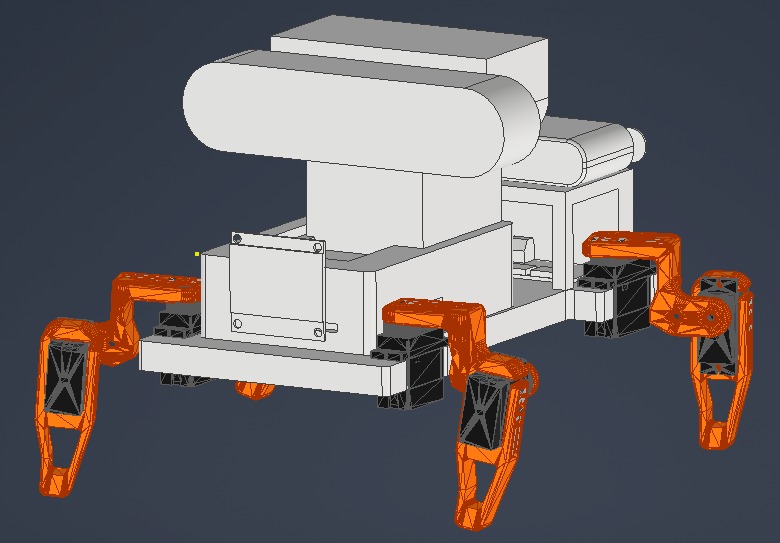
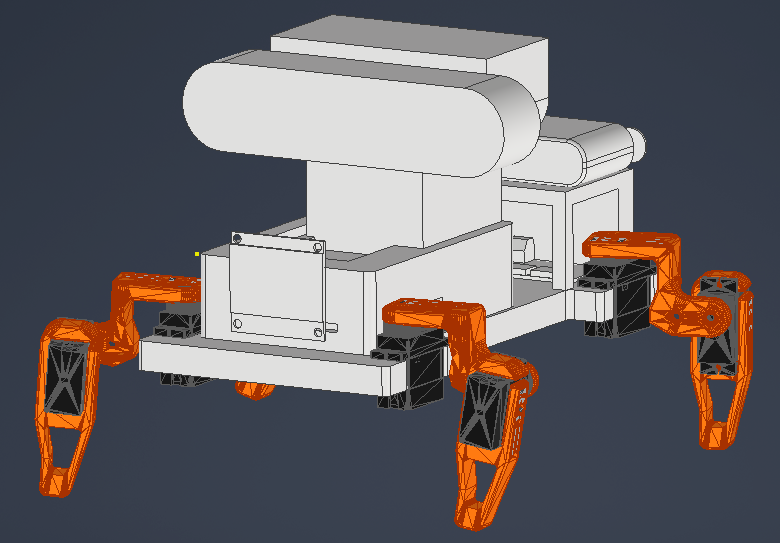
Cleo CAD
-
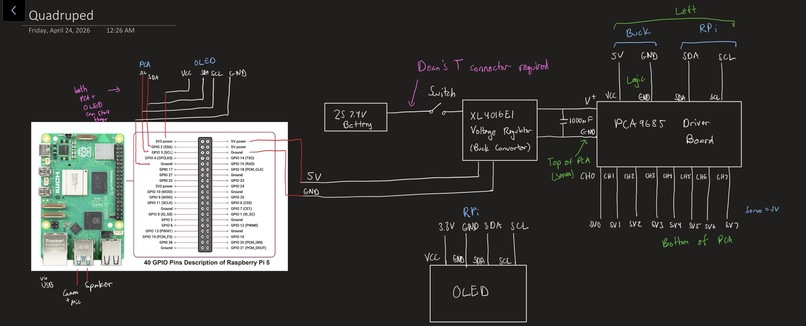
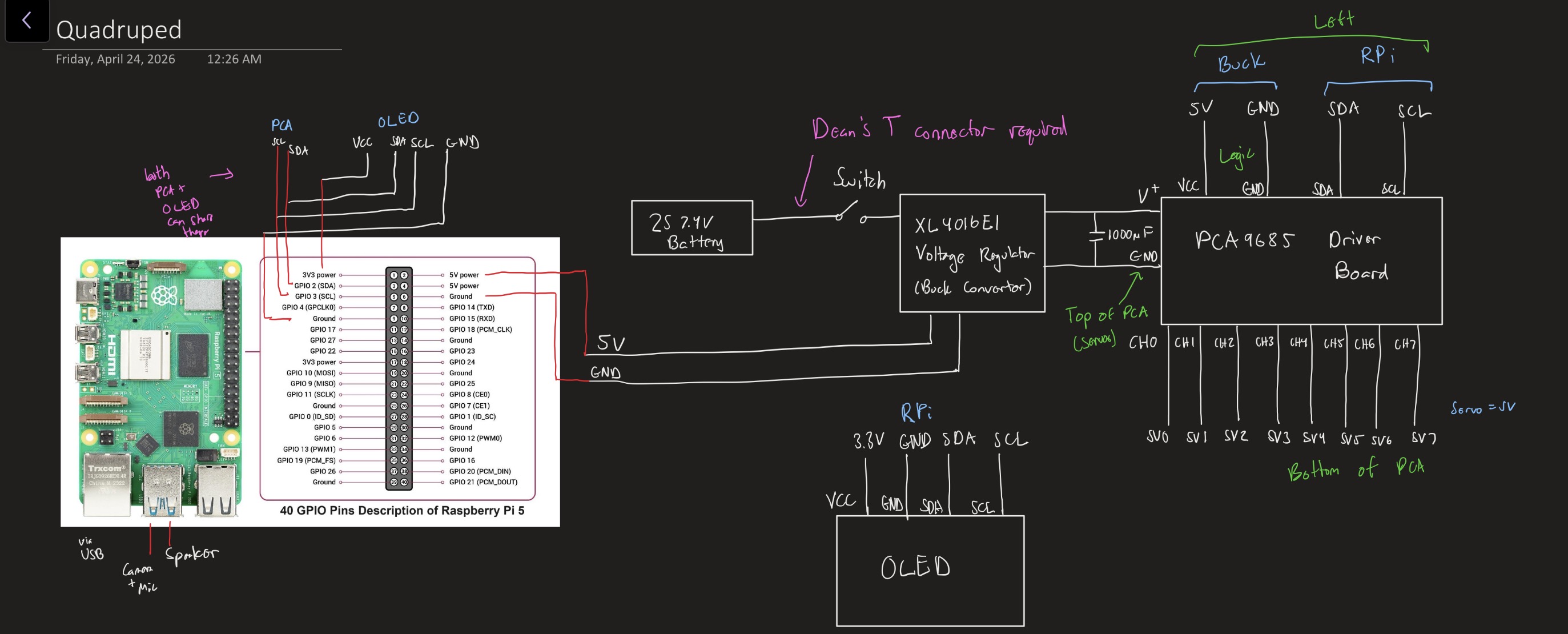
Cleo Wiring
Cleo — AI has a mind. We gave it a body.
Inspiration
The spark came from the Sesame Robot — an open-source quadruped that proved a walking robot could be built cheaply and accessibly. We wanted to take that foundation further.
Look at what's happening globally. China is betting big on AI hardware, humanoid robots, autonomous drones, robotic manufacturing, while North America continues to double down on software. The AI marathon isn't just being run in data centres anymore. It's being run on legs.
We believe the last frontier of AI isn't in the cloud. It's physical. It's embodied. And it starts with giving AI a body it can act through.
So we asked ourselves: what if anyone could build that?
Cleo is our answer. A low-cost, open-source, AI-powered quadruped robot built in 3 days for under $100. Designed from the ground up to be replicated, remixed, and improved by anyone with a 3D printer and a Raspberry Pi. A boilerplate for the next generation of autonomous machines, built in Canada, to keep Canada in the race.
What It Does
Meet Cleo 🐾
Cleo is a fully autonomous four-legged robot that sees, thinks, speaks, and moves. Not because she's remote controlled, not because she's pre-programmed, but because you give her a mission and she figures out the rest.
- 🗣️ Talk to her — speak a mission in plain English and she listens
- 👁️ She sees you — a front-mounted camera identifies objects and people in real time
- 🧠 She thinks — an onboard Gemma 4 model running locally on the Pi decides her next physical action based on what she sees — no cloud, no internet required
- 🚶 She moves — eight servo motors drive four legs in a coordinated gait toward her goal
- 😊 She feels — an OLED face displays her internal state: searching, thinking, found, complete
- 💃 She performs — wave, dance, celebrate when the mission is done
But what makes Cleo truly different is her modular sensor bay, a swappable hardware slot on her chassis that turns her into a specialist. Snap in a module and her entire behaviour profile changes:
| Module | Mode | What she becomes |
|---|---|---|
| PIR motion sensor | Security | Patrols and alerts on intruders |
| SPO2 + vitals sensors | Medical | Emergency responder assistant |
| Temperature + humidity | Environmental | Hazard monitoring robot |
| Camera + depth sensor | Search & Rescue | Victim identification in tight spaces |
Our demo scenario is search and rescue. Cleo navigates confined spaces too small or dangerous for humans, identifies victims using computer vision, and alerts first responders with location data. One robot. Swappable purpose. Infinite applications.
She could be your personal assistant, a supply chain operations robot, a security patrol unit, or the first responder that goes in before the humans do.
How We Built It
Hardware
| Component | Purpose |
|---|---|
| Raspberry Pi 5 | Main brain — runs all pipelines |
| 8× MG90S metal gear servos | Locomotion — 2 DOF per leg |
| PCA9685 PWM driver | Servo control over I2C |
| USB webcam with mic | Vision + voice input |
| SSD1306 128×64 OLED | Expressive face display |
| USB speaker | Voice output |
| DLG 1500mAh 2S LiPo | Power source |
| 20A buck converter | Steps 7.4V → 5V rail |
| HC-SR501 PIR sensor | Security module |
| DHT11 sensor | Environmental module |
| Custom 3D printed chassis | PLA+, designed from scratch |
Software
| Technology | Role |
|---|---|
| Python 3 | Full software stack |
| OpenCV + MobileNet SSD | Real-time object detection |
| Gemma 4 (local) | Onboard LLM mission decision engine |
faster-whisper |
Local speech-to-text |
| gTTS / ElevenLabs | Text-to-speech |
adafruit-pca9685 |
Servo I2C control |
luma.oled + Pillow |
OLED face rendering |
How It All Flows
You speak a mission
→ faster-whisper transcribes locally on Pi
→ vision pipeline captures frame + detects objects
→ Gemma 4 receives mission + detections (fully local, no cloud)
→ returns single action: walk_forward / turn_left / complete
→ PCA9685 drives servos
→ OLED face updates
→ loop repeats until mission complete
No cloud robotics middleware. No ROS. No co-processor. Just a Raspberry Pi, Python, and a lot of wire.
Challenges We Ran Into
Powering the Raspberry Pi from battery The Pi 5 normally draws up to 3A over USB-C with built-in protection circuitry. Powering it directly from a LiPo through a buck converter requires careful voltage regulation and protection circuits we couldn't add cleanly within the build window. Getting this right without frying a $100 computer under time pressure was one of our biggest hardware challenges.
Space allocation inside the chassis Fitting a Raspberry Pi 5, PCA9685, buck converter, LiPo, OLED, camera, speaker, and sensor bay into a chassis small enough to be a quadruped, while leaving room for eight servo cables, required multiple CAD iterations and creative stacking. Every millimetre counted.
Wire management without a PCB A custom PCB would have made this clean. Instead we sourced individual components from a local electronics shop and hand-wired everything ourselves.
Accomplishments We're Proud Of
- Built a fully walking quadruped from scratch in under a week
- End-to-end autonomous mission loop: voice in, physical action out, no human in the loop
- Modular sensor bay that changes the robot's entire purpose with a hardware swap
- Expressive OLED face that makes the robot's internal state legible to anyone watching
- Entire stack on a single Raspberry Pi 5: no cloud compute, no co-processor
- Under $100: easily replicable by any student or maker
What's Next for Cleo
- Make her compact: redesign the chassis to be significantly smaller, closer to the Sesame Robot's footprint
- Replace bulky USB peripherals: swap USB speaker, mic, and webcam for smaller embedded components (I2S microphone, CSI camera, Class D amp)
- Custom PCB: replace the hand-wired harness with a proper PCB that integrates PCA9685, power regulation, and sensor headers cleanly
- Proper battery protection circuit: add dedicated power management for safe direct battery powering of the Pi 5
- Full open-source release: detailed build instructions, CAD files, and code so anyone anywhere can build their own Cleo in a weekend
Because the fastest way to keep Canada in the AI hardware race is to make the starting line accessible to everyone.





Log in or sign up for Devpost to join the conversation.