
Inspiration
I was walking down the streets of Toronto and noticed how there always seemed to be cigarette butts outside of any building. It felt disgusting for me, especially since they polluted the city so much. After reading a few papers on studies revolving around cigarette butt litter, I noticed that cigarette litter is actually the #1 most littered object in the world and is toxic waste. Here are some quick facts
- About 4.5 trillion cigarette butts are littered on the ground each year
- 850,500 tons of cigarette butt litter is produced each year. This is about 6 and a half CN towers worth of litter which is huge! (based on weight)
- In the city of Hamilton, cigarette butt litter can make up to 50% of all the litter in some years.
- The city of San Fransico spends up to $6 million per year on cleaning up the cigarette butt litter
Thus our team decided that we should develop a cost-effective robot to rid the streets of cigarette butt litter
What it does
Our robot is a modern-day Wall-E. The main objectives of the robot are to:
- Safely drive around the sidewalks in the city
- Detect and locate cigarette butts on the ground
- Collect and dispose of the cigarette butts
How we built it
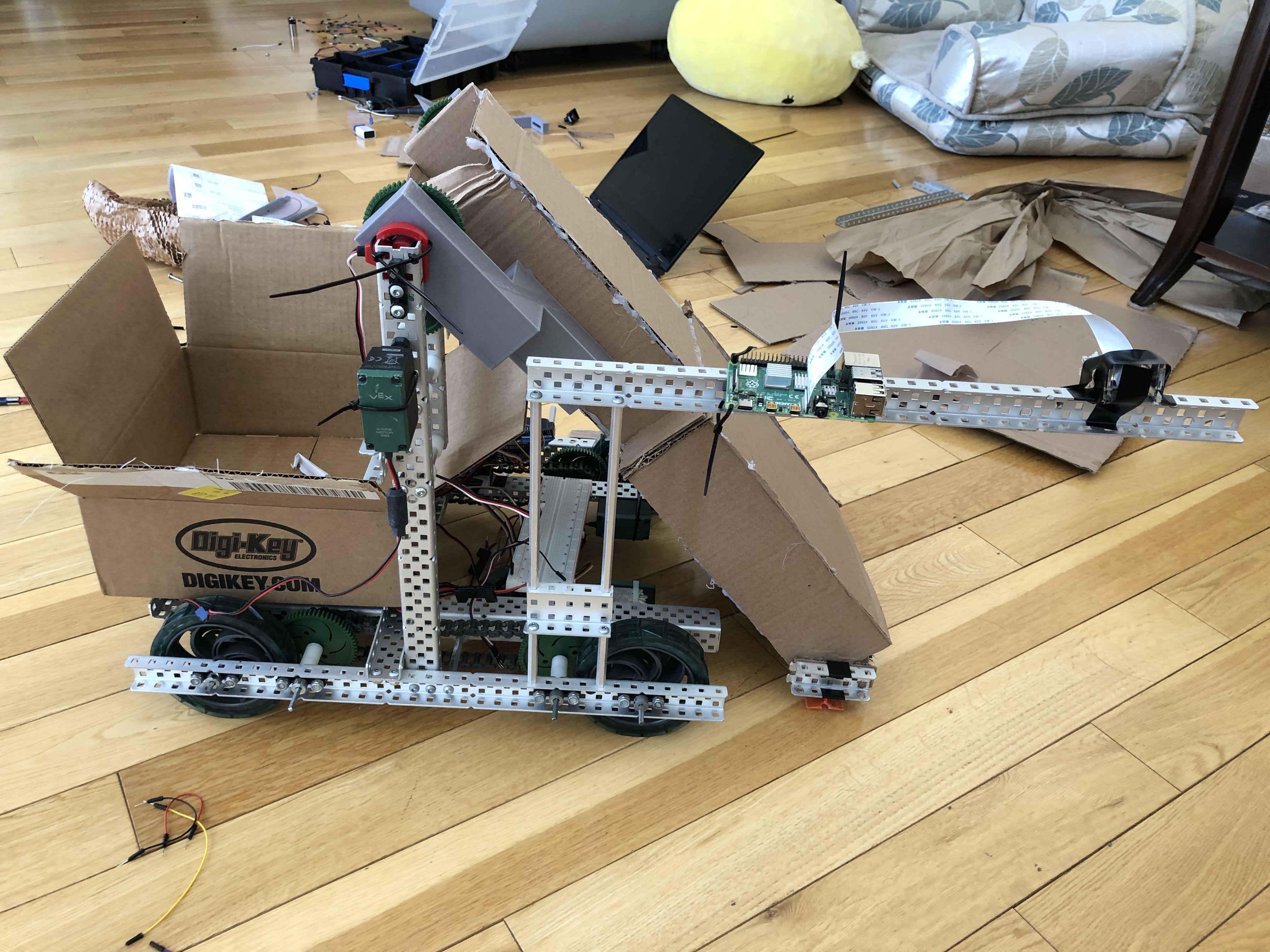
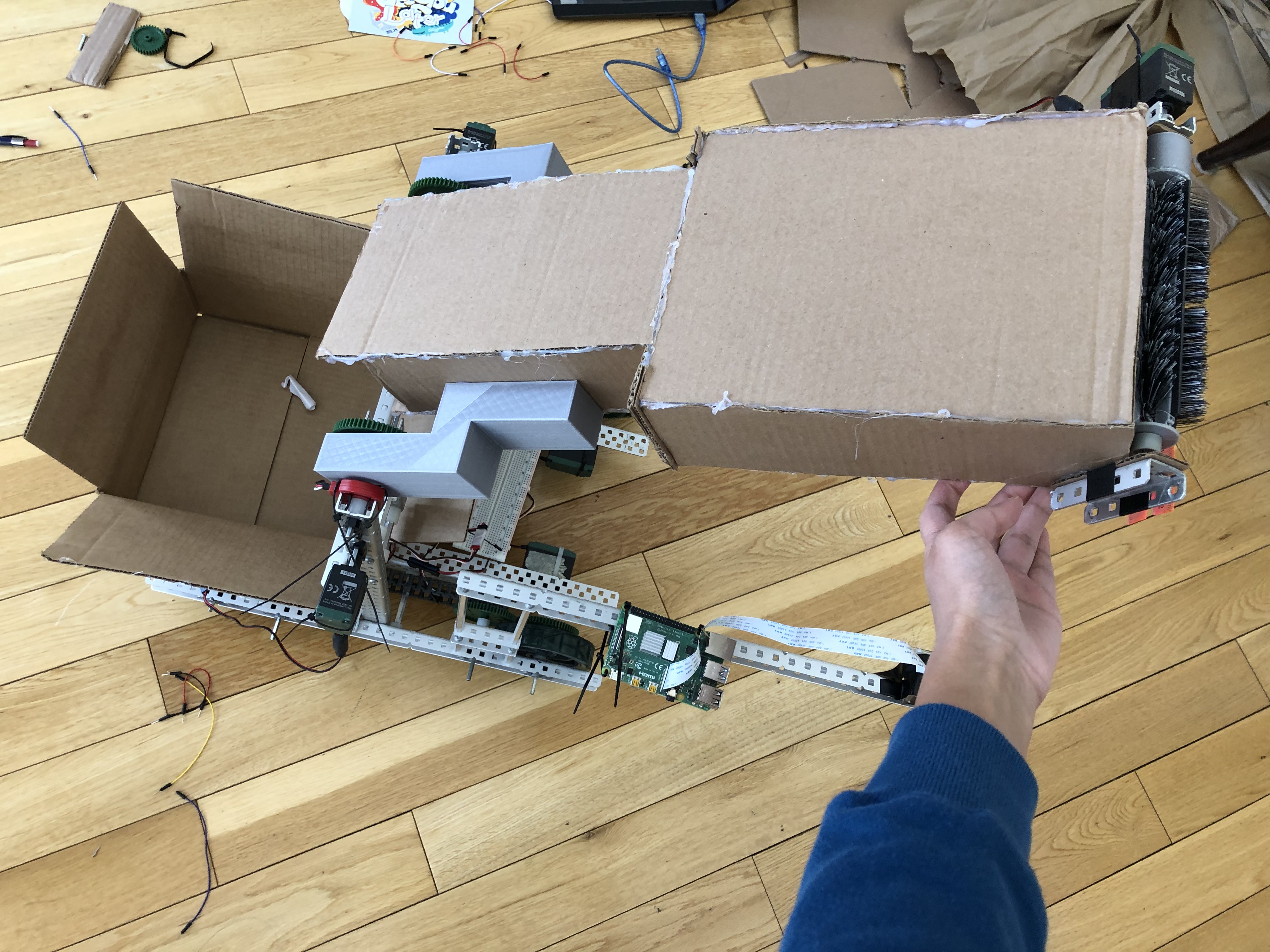
Our basic idea was to build a robot with a camera that could find cigarette butts on the ground and collect those cigarette butts with a roller-mechanism. Below are more in-depth explanations of each part of our robot.
Software
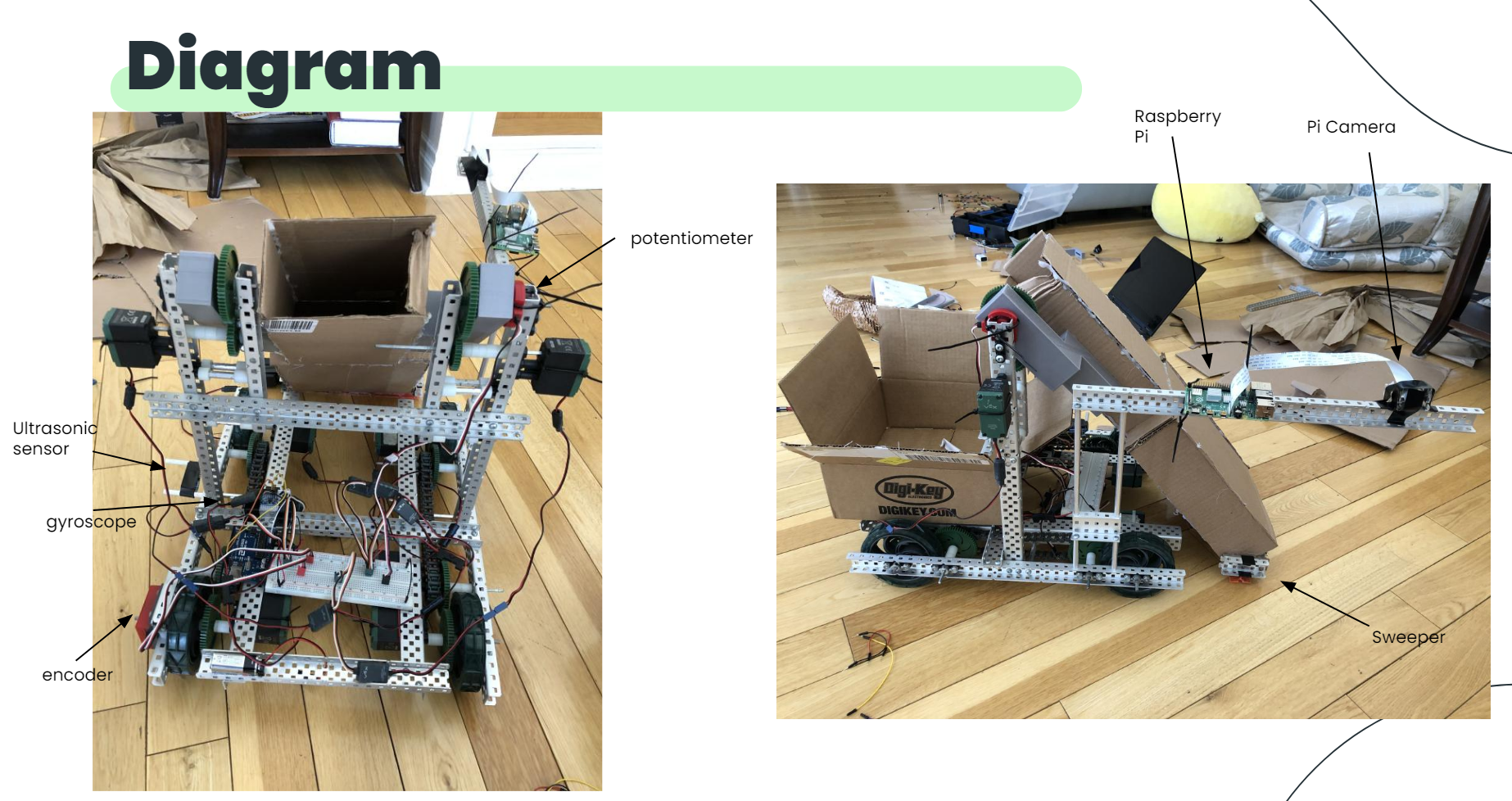
We needed a method to be able to easily detect cigarette butts on the ground, thus we used computer vision. We made use of this open-source project: Mask R-CNN for Object Detection and Segmentation and pre-trained weights. We used a Raspberry Pi and a Pi Camera to take pictures of cigarettes, process the image Tensorflow, and then output coordinates of the location of the cigarette for the robot. The Raspberry Pi would then send these coordinates to an Arduino with UART.
Hardware
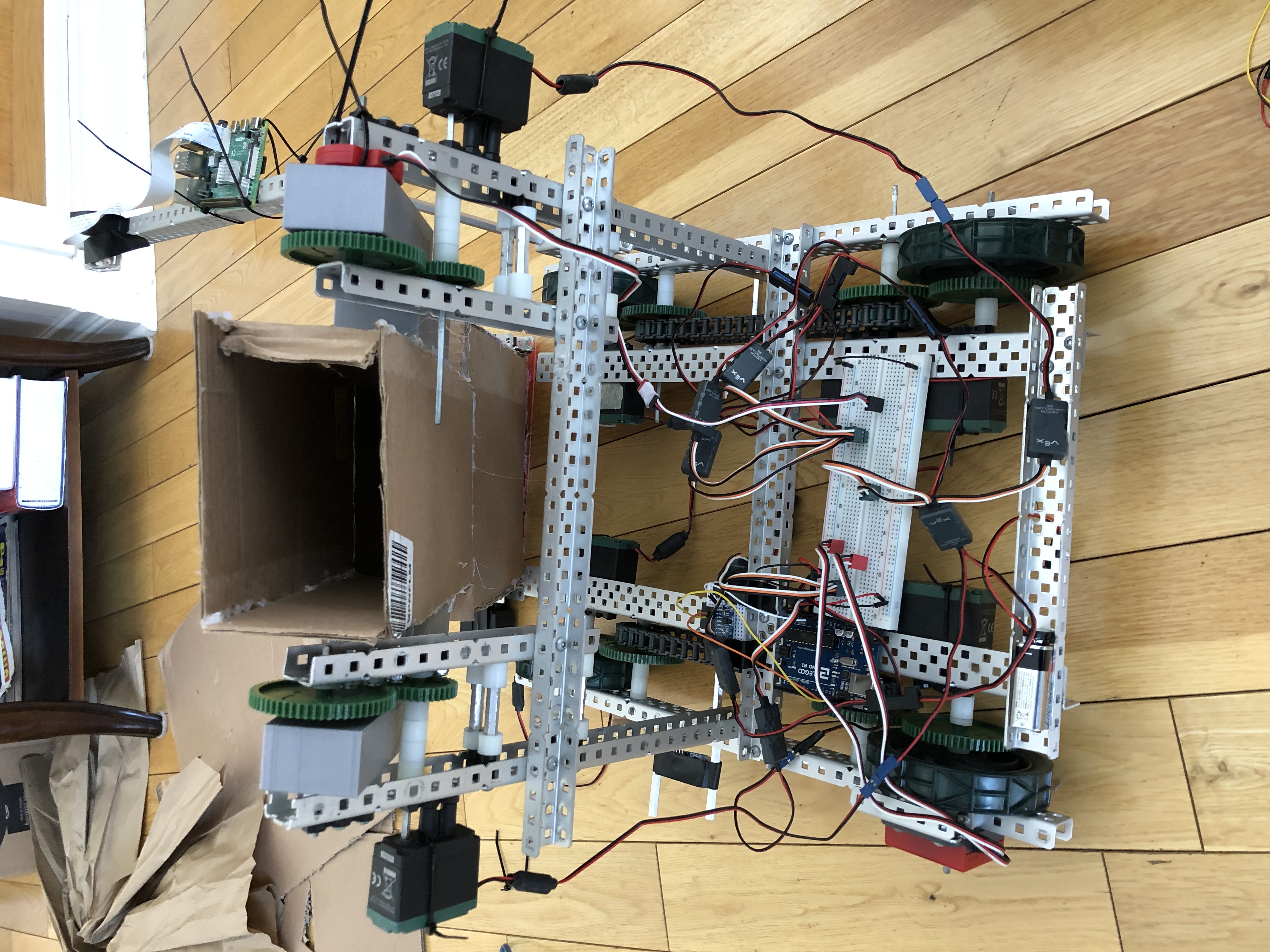
The Arduino controls all the hardware on the robot, including the motors and roller-mechanism. The basic idea of the Arduino code is:
- Drive a pre-determined path on the sidewalk
- Wait for the Pi Camera to detect a cigarette
- Stop the robot and wait for a set of coordinates from the Raspberry Pi to be delivered with UART
- Travel to the coordinates and retrieve the cigarette butt
- Repeat
We use sensors such as a gyro and accelerometer to detect the speed and orientation of our robot to know exactly where to travel. The robot uses an ultrasonic sensor to avoid obstacles and make sure that it does not bump into humans or walls.
Mechanical
We used Solidworks to design the chassis, roller/sweeper-mechanism, and mounts for the camera of the robot. For the robot, we used VEX parts to assemble it. The mount was 3D-printed based on the Solidworks model.
Challenges we ran into
- Distance: Working remotely made designing, working together, and transporting supplies challenging. Each group member worked on independent sections and drop-offs were made.
- Design Decisions: We constantly had to find the most realistic solution based on our budget and the time we had. This meant that we couldn't cover a lot of edge cases, e.g. what happens if the robot gets stolen, what happens if the robot is knocked over ...
- Shipping Complications: Some desired parts would not have shipped until after the hackathon. Alternative choices were made and we worked around shipping dates
Accomplishments that we're proud of
We are proud of being able to efficiently organize ourselves and create this robot, even though we worked remotely, We are also proud of being able to create something to contribute to our environment and to help keep our Earth clean.
What we learned
We learned about machine learning and Mask-RCNN. We never dabbled with machine learning much before so it was awesome being able to play with computer-vision and detect cigarette-butts. We also learned a lot about Arduino and path-planning to get the robot to where we need it to go. On the mechanical side, we learned about different intake systems and 3D modeling.
What's next for Cigbot
There is still a lot to do for Cigbot. Below are some following examples of parts that could be added:
- Detecting different types of trash: It would be nice to be able to gather not just cigarette butts, but any type of trash such as candy wrappers or plastic bottles, and to also sort them accordingly.
- Various Terrains: Though Cigbot is made for the sidewalk, it may encounter rough terrain, especially in Canada, so we figured it would be good to add some self-stabilizing mechanism at some point
- Anti-theft: Cigbot is currently small and can easily be picked up by anyone. This would be dangerous if we left the robot in the streets since it would easily be damaged or stolen (eg someone could easily rip off and steal our Raspberry Pi). We need to make it larger and more robust.
- Environmental Conditions: Currently, Cigbot is not robust enough to handle more extreme weather conditions such as heavy rain or cold. We need a better encasing to ensure Cigbot can withstand extreme weather.
Sources
- https://www.ncbi.nlm.nih.gov/pmc/articles/PMC3397372/
- https://www.cbc.ca/news/canada/hamilton/cigarette-butts-1.5098782
- https://www.nationalgeographic.com/environment/article/cigarettes-story-of-plastic#:~:text=Did%20You%20Know%3F-,About%204.5%20trillion%20cigarettes%20are%20discarded%20each%20year%20worldwide%2C%20making,as%20long%20as%2010%20years.
Built With
- arduino
- computer-vision
- machine-learning
- mask-rcnn
- python
- raspberry-pi
- solidworks
- tensorflow
- vex





Log in or sign up for Devpost to join the conversation.