-
-
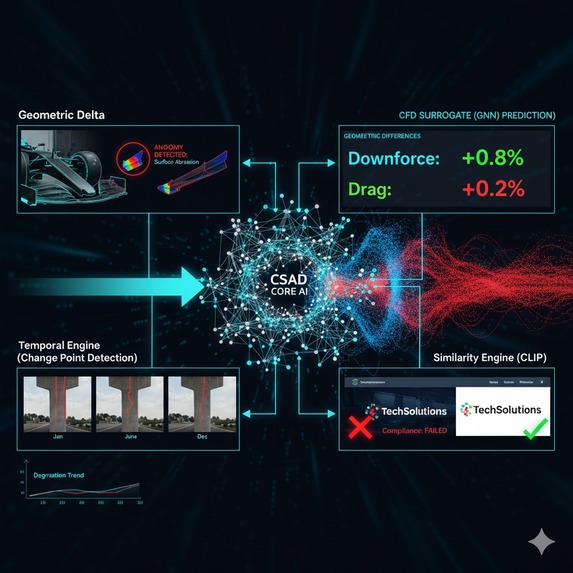
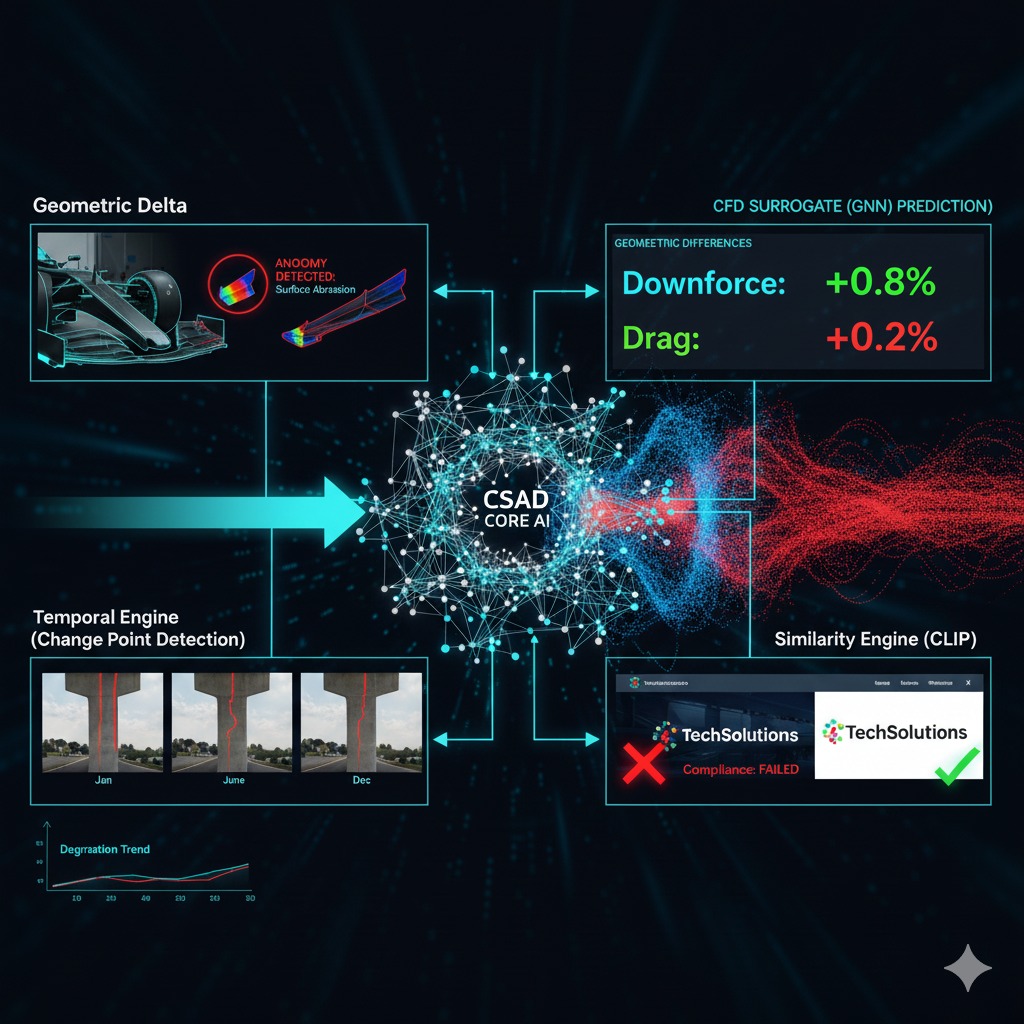
The "Wow" Factor - Predicting Aerodynamic Impact
-

The Final Output - Actionable Insights Dashboard
-

The core problem of digital vs. reality
-
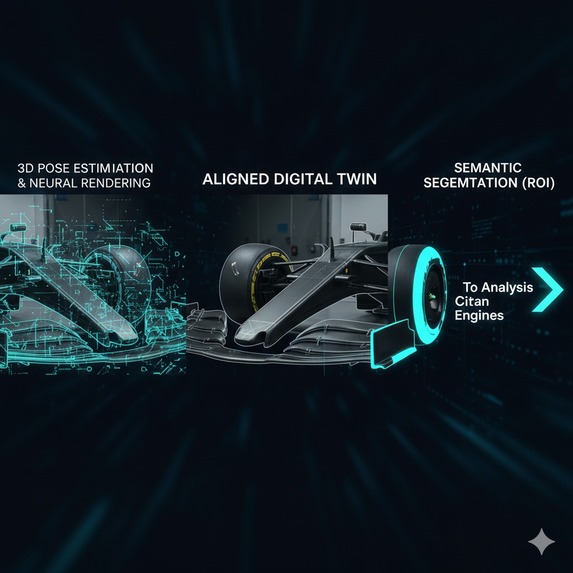
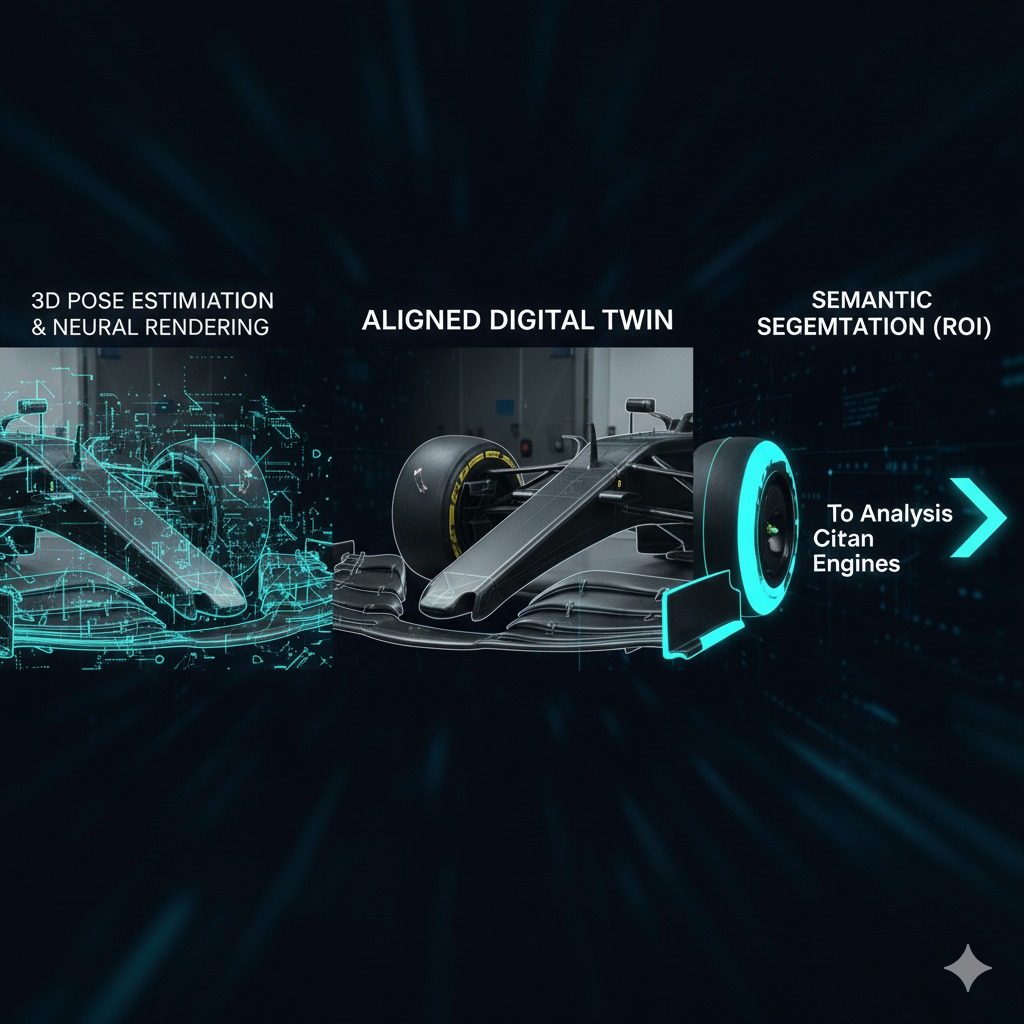
Alignment & Segmentation
-
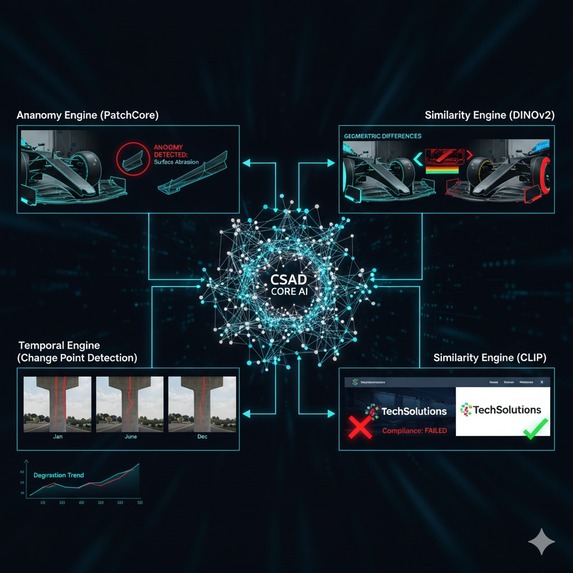
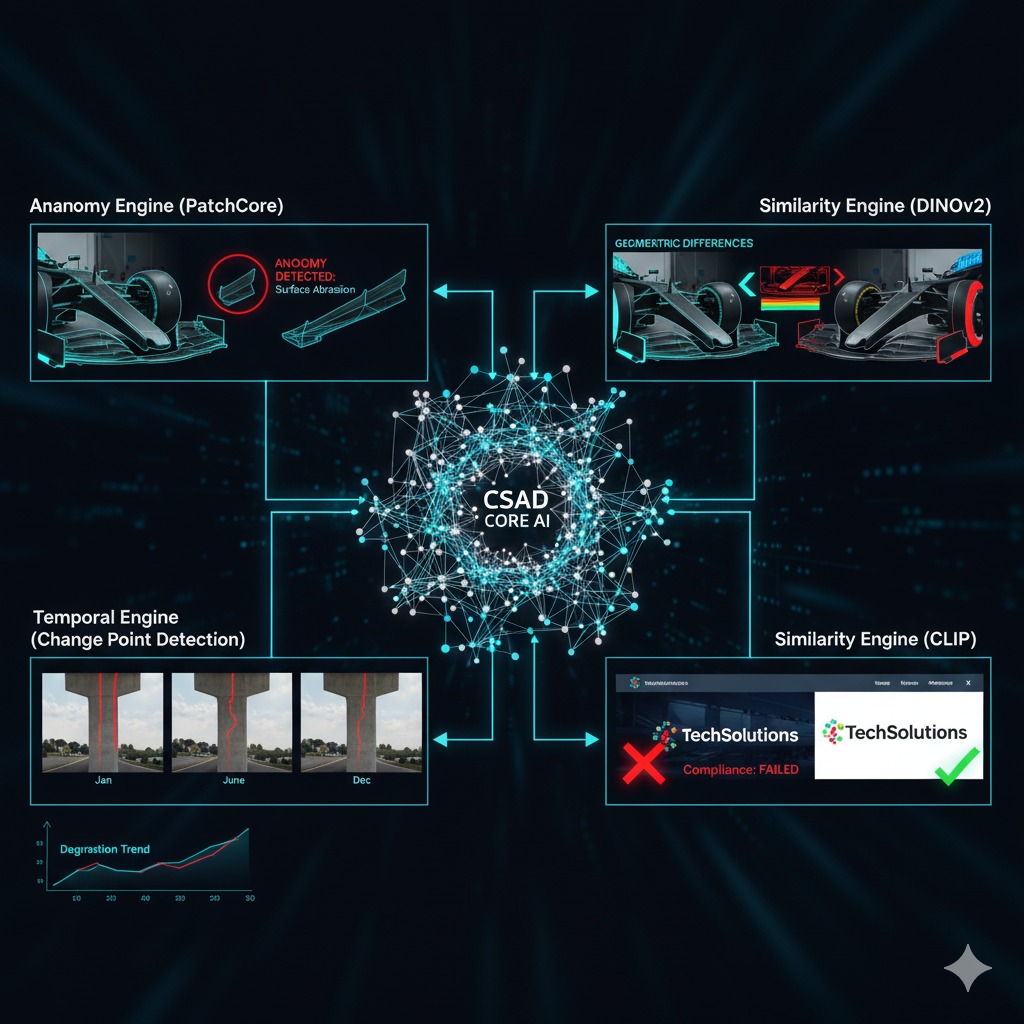
The Solution Part 2 - The Core Analysis Engines


Inspiration... (Problem Understanding & Alignment)
Our inspiration stems from a deep understanding of the problem's dual nature — serving both the precision-obsessed Haas F1 Team and the scalable enterprise needs of Mphasis.
We recognized that a generic Visual Difference Engine would fail. True alignment with the problem theme required a solution that could provide millisecond-critical insights for F1 manufacturing while also being a robust, productizable platform for Mphasis’s global clients.
This led us to a core mission: to build an AI that doesn’t just find differences but interprets their real-world impact — turning a geometric tweak on an F1 car into a predictable performance gain, and a manufacturing flaw into an actionable quality control alert.
What We Learned... (Innovation & Uniqueness)
This project has been a rapid learning curve focused on innovation.
We learned that the most creative approach was not a single algorithm but a modular, multi-engine architecture — a major departure from existing monolithic systems.
This allowed us to build specialized pipelines for each unique application while maintaining a unified core framework.
Most importantly, we learned that the ultimate goal is to translate raw data into business impact.
This led to our most novel concept: the CFD Surrogate Engine.
While other systems might detect a change, ours is designed to predict its aerodynamic consequences, offering a competitive advantage that bridges design and performance in real time.
How We Built Our Project... (Technical Feasibility)
Our solution — the CSAD (Chrono-Spatial Anomaly Detection) System — is designed to be technically realistic and deployable.
We’re building it on a Python/PyTorch stack, leveraging state-of-the-art yet well-documented AI models.
The process begins by addressing the digital-to-reality gap using neural rendering to create a perfectly aligned digital twin of a real-world object.
Our Semantic Engine (SAM + Grounding DINO) then isolates the specific region of interest for detailed analysis.
Specialized Engines
1. Anomaly Engine (PatchCore)
For manufacturing QC, it spots any defect by comparing a real part to a memory bank of "perfect" features.
An anomaly score $S_{anomaly}$ is calculated based on the distance in feature space between a test image’s embedding $\phi(I_{test})$ and the set of memorized normal embeddings $C$:
$$ S_{anomaly} = \min_{c_i \in C} ||\phi(I_{test}) - c_i||_2 $$
2. Similarity Engine (DINOv2)
This Vision Transformer backbone generates a rich feature embedding $v \in \mathbb{R}^d$ for any given object.
We compare the embeddings of two designs ($v_A, v_B$) using cosine similarity:
$$ S_{sim}(v_A, v_B) = \frac{v_A \cdot v_B}{||v_A|| \cdot ||v_B||} $$
A score closer to 1 indicates higher similarity.
3. Temporal Engine
Uses established change point detection algorithms to analyze time-series embeddings, identifying long-term trends or sudden shifts.
4. CFD Surrogate Engine (GNN)
Our key innovation — this Graph Neural Network approximates complex fluid dynamics.
It takes a geometric change represented as a graph $\Delta G$ and predicts the resulting change in aerodynamic coefficients like downforce ($C_L$) and drag ($C_D$):
$$ (\Delta C_L, \Delta C_D) = f_{GNN}(\Delta G) $$
This allows for near real-time performance analysis, a process that traditionally takes hours.
The entire system is structured as enterprise-ready microservices, showing a clear and practical path to a deployable prototype.
Challenges We Are Facing and Will Face... (Demonstrating Feasibility)
A crucial part of ensuring feasibility is identifying challenges early and planning realistic solutions.
1. The Digital vs. Reality Gap
Reliably comparing synthetic CAD data to real-world photos is our biggest technical hurdle.
Our 3D-aware alignment pipeline solves this by normalizing inputs and ensuring accurate comparisons.
2. Data Scarcity
We anticipate that large, labeled datasets of F1 parts or manufacturing defects will be limited.
Our strategy is built around this constraint — leveraging few-shot learning models like PatchCore and generating synthetic training data from CAD models.
3. Designing for Duality
We’re balancing two goals: being highly specialized for F1 while staying generalizable for enterprise clients.
Our modular engine architecture enables this duality by allowing flexible, reusable components to form custom pipelines
Built With
- amazon-web-services
- azure
- clip
- dinov3
- docker
- faiss
- gcp
- graph-neural-networks-(gnns)
- grounding-dino
- grpc
- kafka
- kubernetes
- milvus
- mlflow
- nvidia-jetson
- nvidia-triton-inference-server
- onnx
- opencv
- patchcore
- python
- pytorch
- pytorch3d
- rest-apis
- sam-(segment-anything-model)
- scikit-learn
- tensorflow
- timescaledb


Log in or sign up for Devpost to join the conversation.