A work in progress. PhillyCodefest is an opportunity to build the basic libraries and implement the base functionality of the robot arm. Goals for the weekend are:
- Develop a method of moving the arm to a given position in x,y,theta coordinates
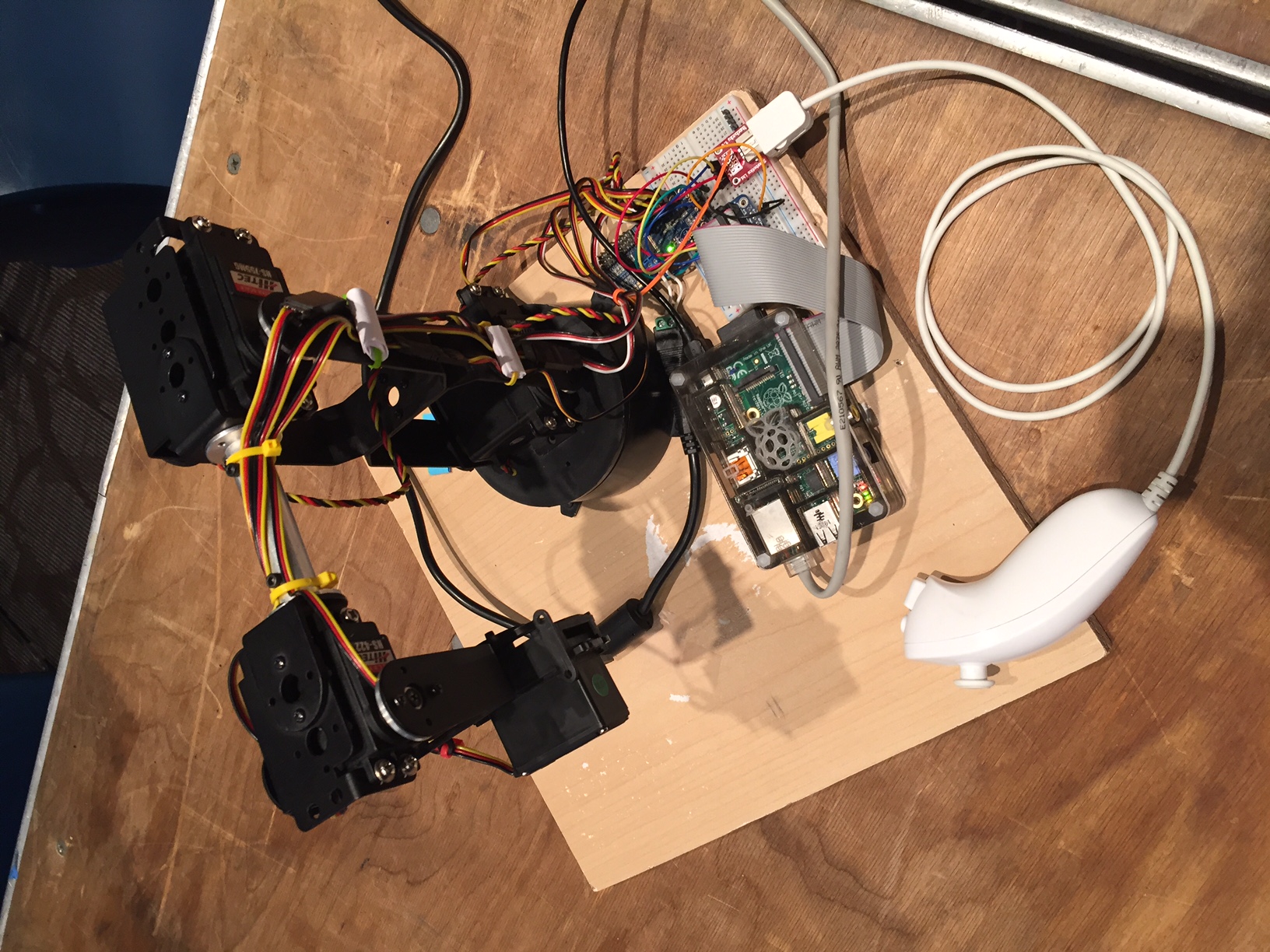
- Develop a method of controlling the arm manually for testing and debugging purposes

Log in or sign up for Devpost to join the conversation.