Inspiration
Long brainstorming session with a whiteboard looming over us.
What it does
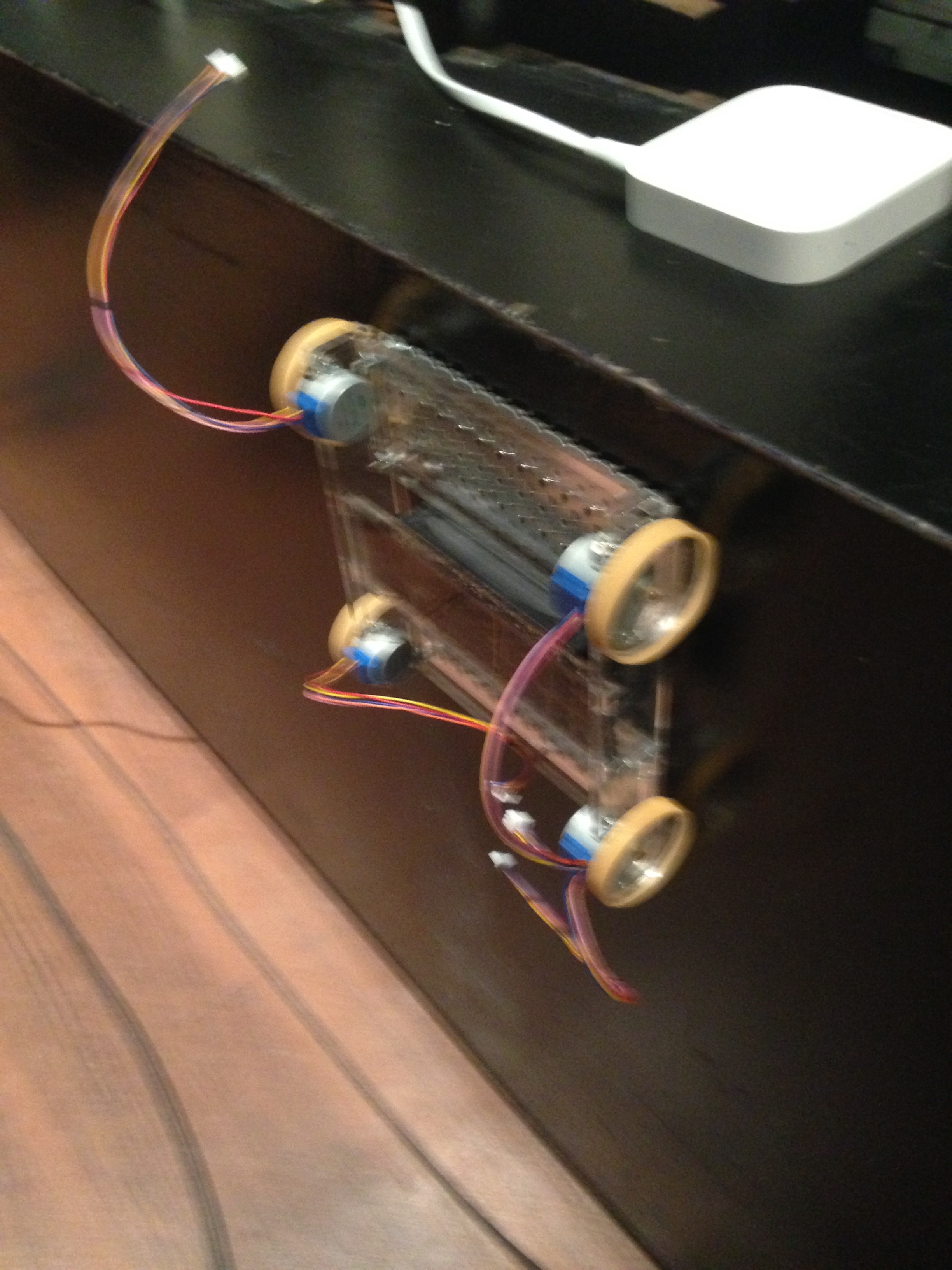
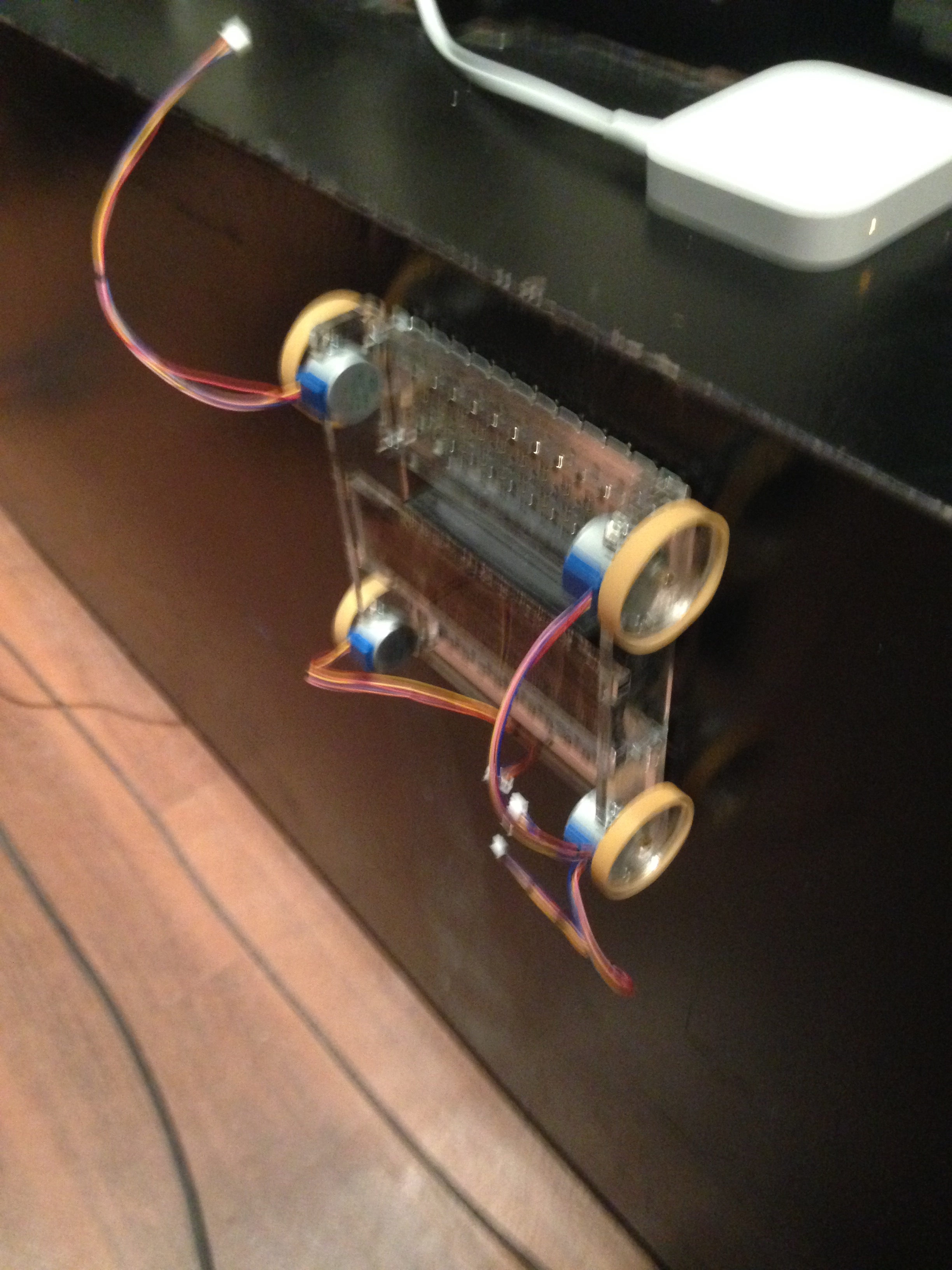
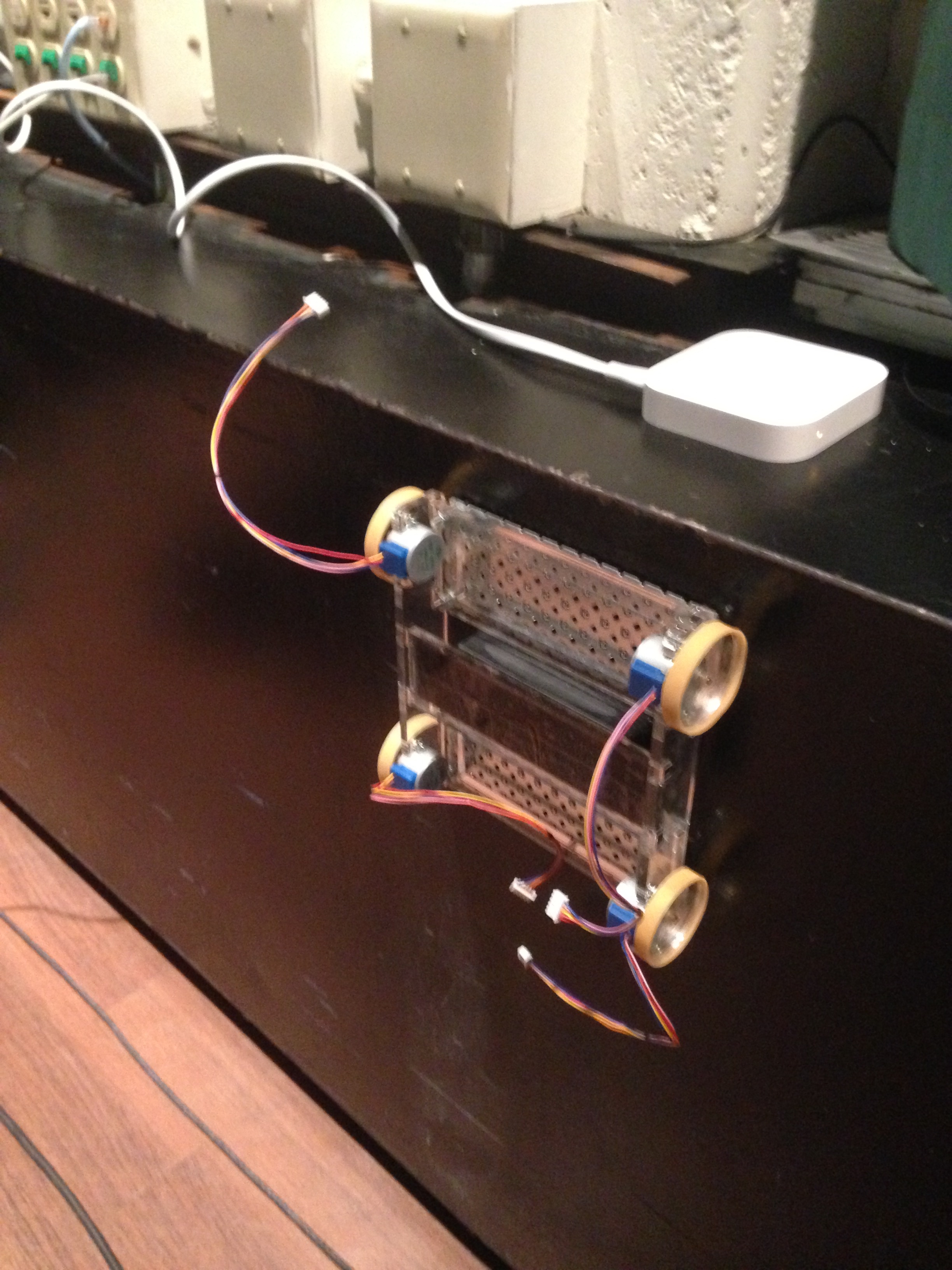
It drives itself while magnetized to a white board or black board in order to erase writing on the board.
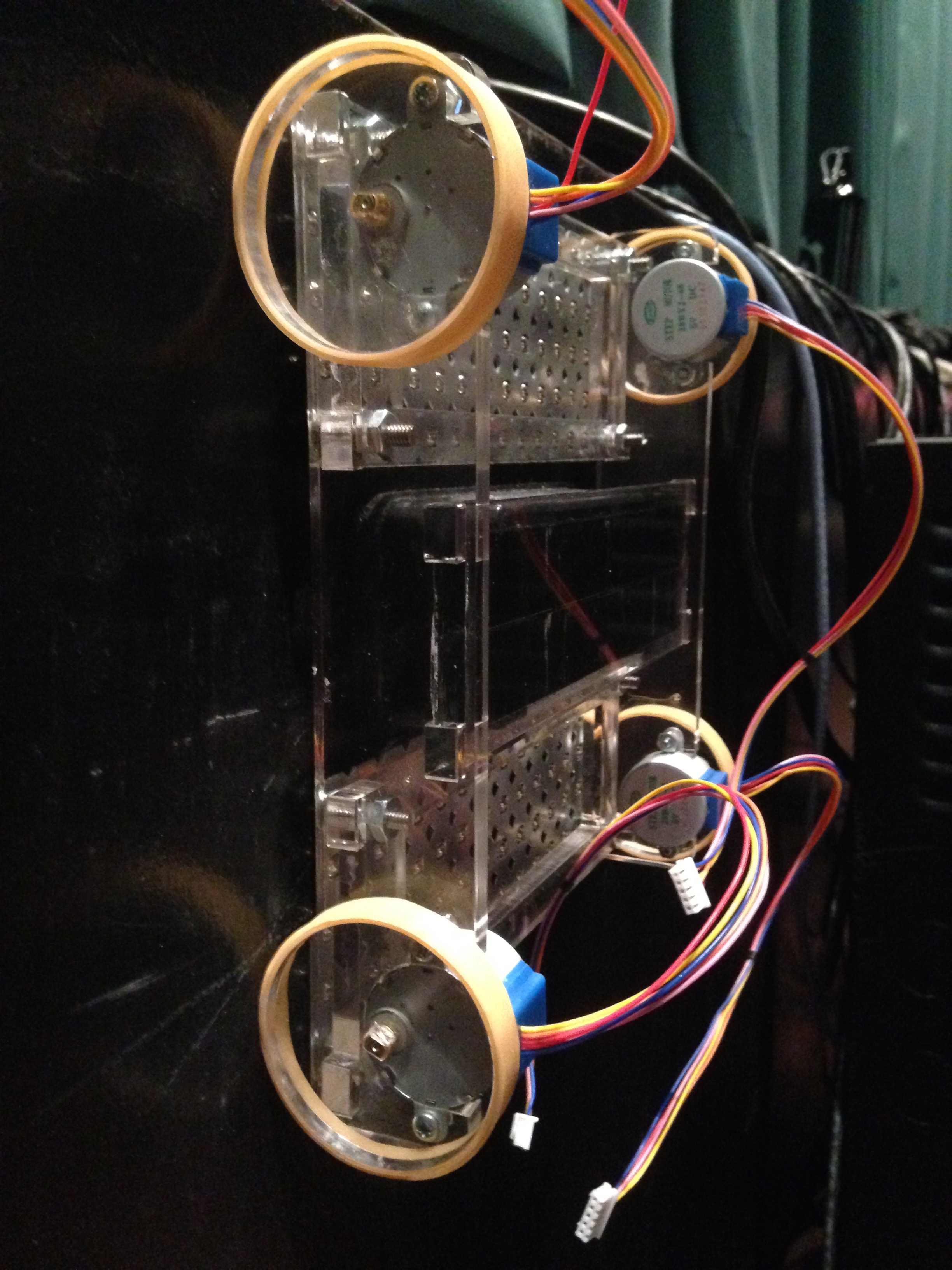
How we built it
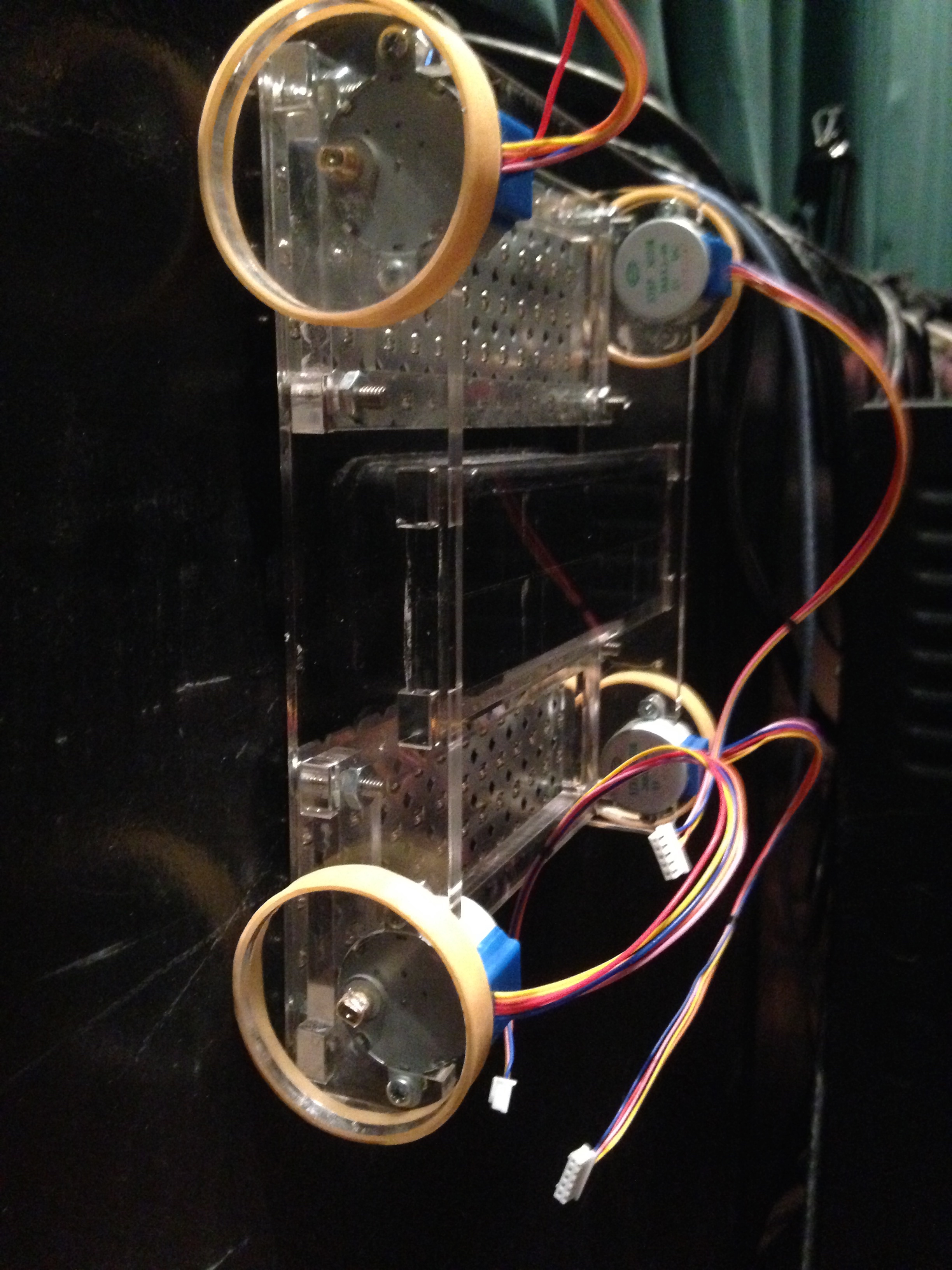
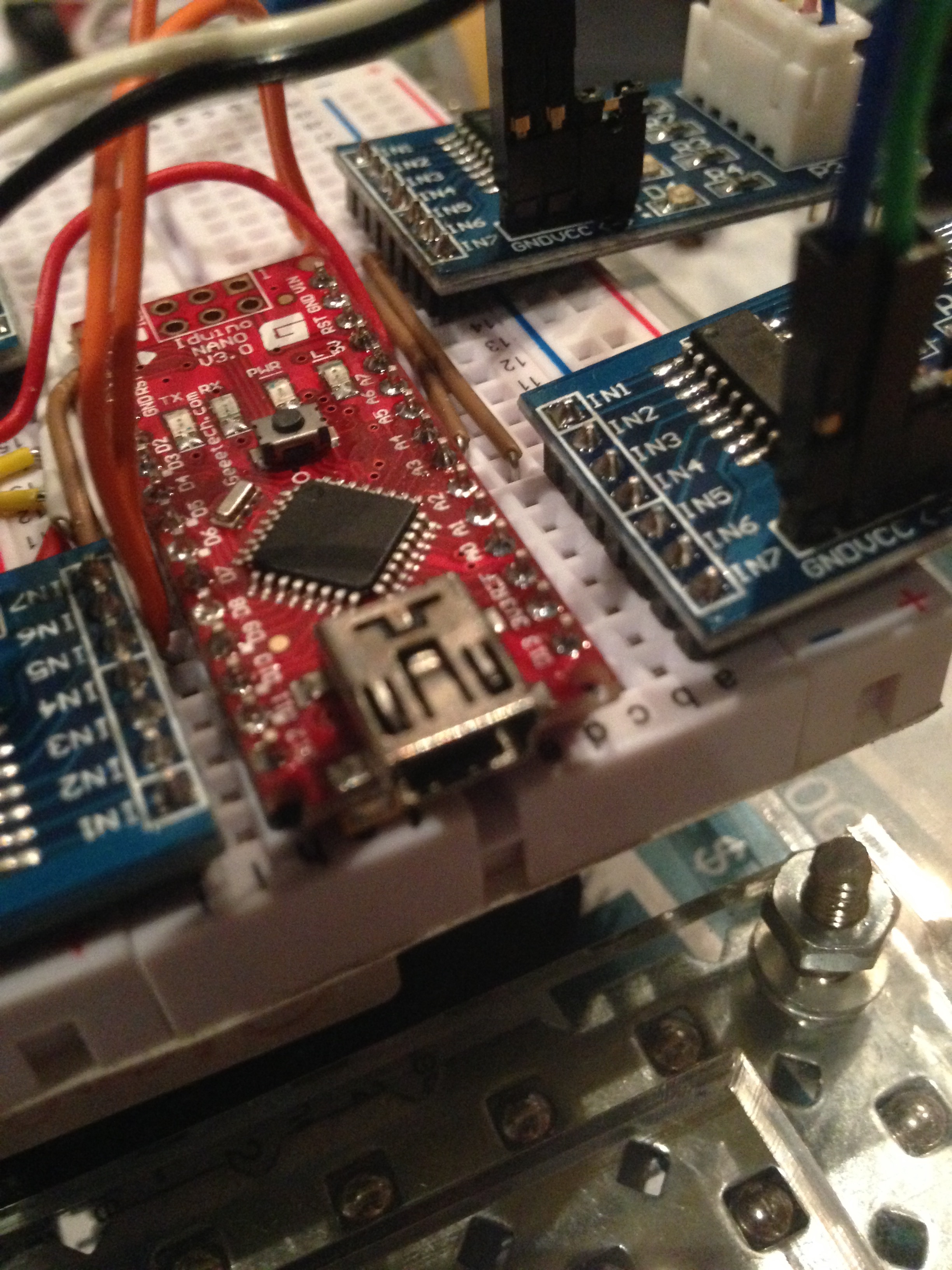
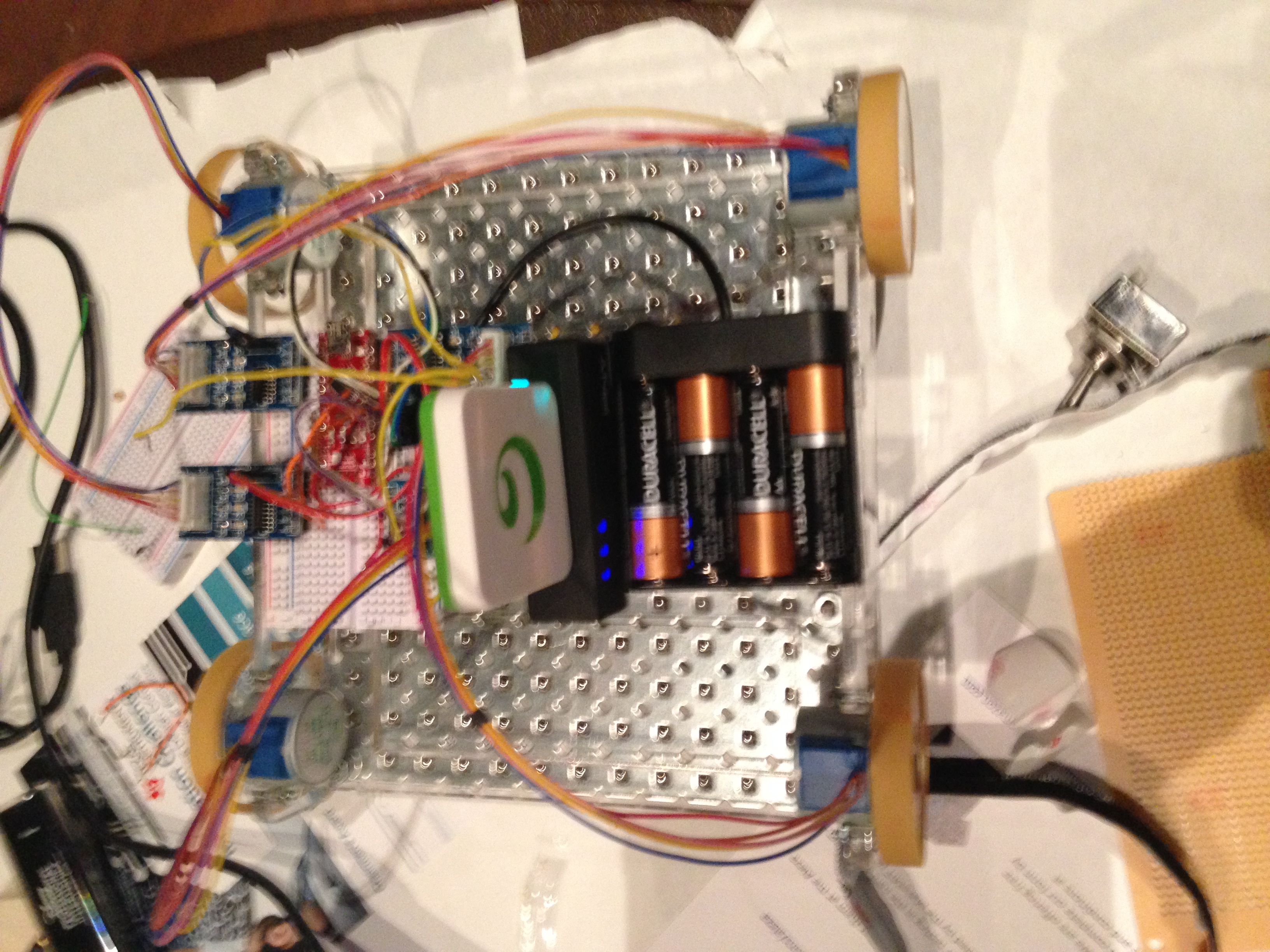
We laser cut acrylic to make a chassis, connecting pieces and wheels which were then wrapped by rubber bands to increase the coefficient of friction. We also constructed magnetic sleds from metal with small Neodymium magnets evenly distributed through the surface. Between the two sleds is a raised velcro strip, allowing one to velcro a white-board or blackboard eraser to the bottom of the bot. This velcro strip is connected to a central beam, which is also where our major electronic components are placed, giving them enough distance from the magnets. Each wheel is connected to its own stepper motors, controlled by arduino. This communicates with the kinoma, allowing for wireless control and easy use. Most of the connections are made either through super glue in complementary pieces or through nuts and bolts.
Challenges we ran into
The wheels, the magnetic strip, and the eraser had to all be calibrated to a very precise equal height, so that it could stick, move, and erase. If any part was too far forward, the device would not work. And we believe that we got the ratio correct, making the design very cohesive. Setting up the kinoma was also a struggle, we had trouble making it communicate. We also had limited access to tools and materials (only one size of rubber band, bolts that didn't have nuts of a matching size, needed a power sander), but we made through. We also did not have time to program an AI, only having it start and go in one direction and then stop. Finally, we ran out of time to actually make it move, but we believe that it has the capability to move and only requires new electrical engineering.
Accomplishments that we're proud of
It sticks and the wheels move.
What we learned
We learned a lot about the kinoma and that whole system. We also learned about the photon too, though that was not used in our final design (as happens).
What's next for ChalkBot
We need to get the bot to move primarily, requiring a new electrical setup. But what we really want to do is... DrawBot function! Since the eraser is removable, we could add an attachment for a pen or chalk, and the bot would be able to draw shapes on a board. We also need to put significant work into the programming of the bot, allowing it to cover the whole board efficiently and turn at edges. Finally, the addition of sensors would be very helpful, allowing the bot to know when to stop, when to turn, and when to keep on erasing.

Log in or sign up for Devpost to join the conversation.