-
-
-
-
-

-

CelesTerrAIn by Raeef Dean

CelesTerrAIn: An Autonomous Terrain Mapping System
Inspiration
Although I might not have won the escape room game from one of Saturday morning activities, it did serve as the inspiration for this route planning idea (“to help quickly escape harsh conditions”). With the increasing focus on space exploration, I wanted to contribute to astronaut safety by developing a tool that could autonomously scout hazardous terrains and optimize navigation. The idea of combining artificial intelligence with space exploration inspired me to build this project.
What it does
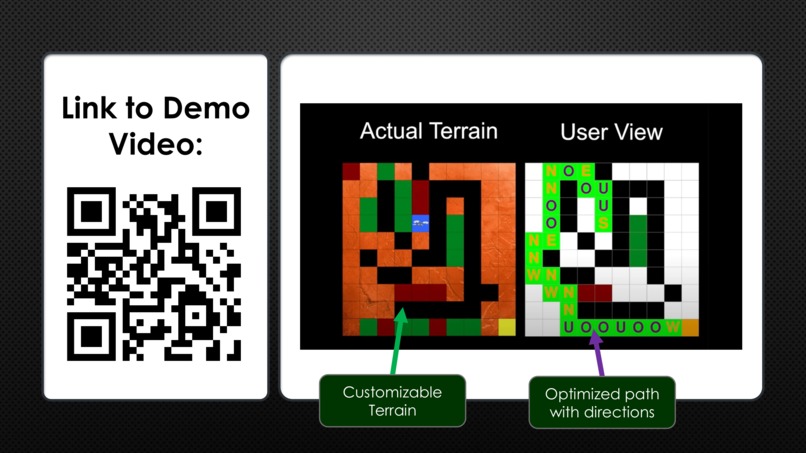
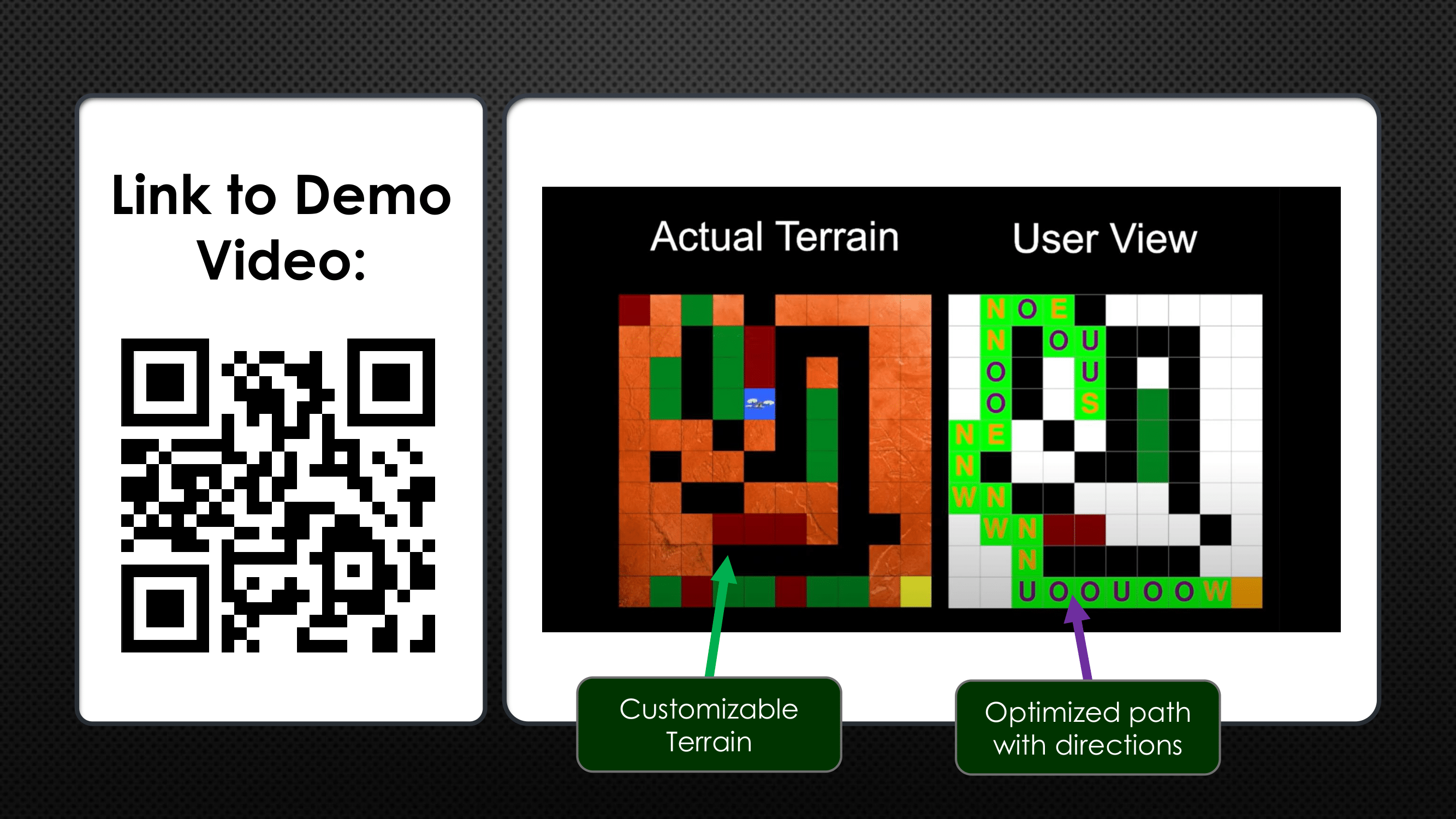
This system utilizes pathfinding algorithms and a robot (a drone or a rover) to find the most efficient path to a target location by mapping out the terrain and returning that data to the user. Astronauts who may find themselves in harsh conditions can use this system to quickly find a way to a safe location through the use of a drone or a rover which can map out the terrain using this software system.
How I built it
- I designed the interface layout and outlined the functionalities, such as terrain hazard detection and route optimization.
- Used Python and Pygame to build the interactive user interface. Implemented the A-STAR pathfinding algorithm for route optimization.
- Designed the simulation environment to mimic Martian-like terrains with obstacles and elevation changes.
- I ran multiple simulations with varied terrain setups to refine the system’s hazard detection and route optimization.
Challenges I ran into
- Balancing speed and accuracy in the A-STAR algorithm to ensure it could handle dynamic changes without lag.
- Creating a clear, intuitive interface while displaying complex data in real-time.
- Simulating realistic extraterrestrial conditions, like craters and rough patches, to test the algorithm.
- Tracking down subtle bugs in the interaction between the visualization layer (Pygame) and the backend logic.
What I learned
- Implementing the A-STAR algorithm gave me insight into how search algorithms work in real-world applications.
- I learned how to create interactive interfaces and visualize complex data effectively.
- Developing the system enhanced my knowledge of decision-making in AI and real-time updates for dynamic environments.
What's next for CelesTerrAIn
In the future, I want to implement a full 3D environment (possibly using a game engine like Unity) so that the program can actually simulate real Martian and other surfaces. I also want to create a system that can handle multiple drones, essentially creating a swarm of drones all finding the path together.

Log in or sign up for Devpost to join the conversation.