
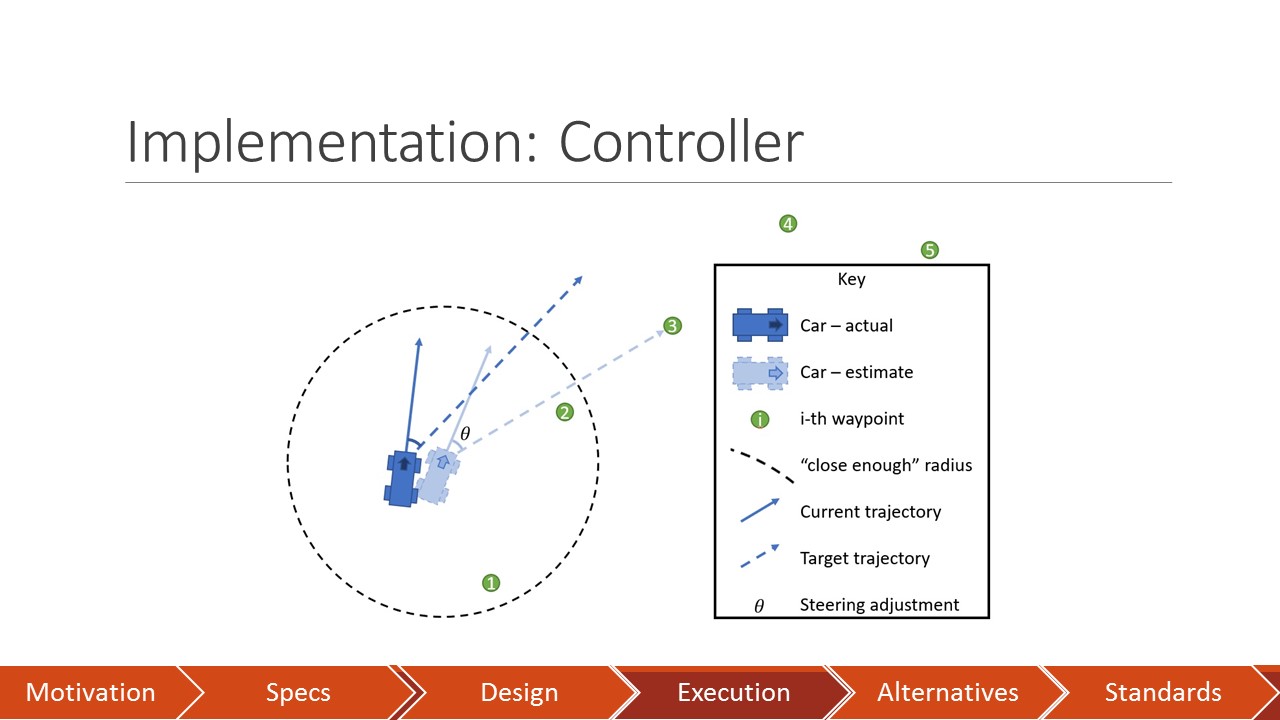
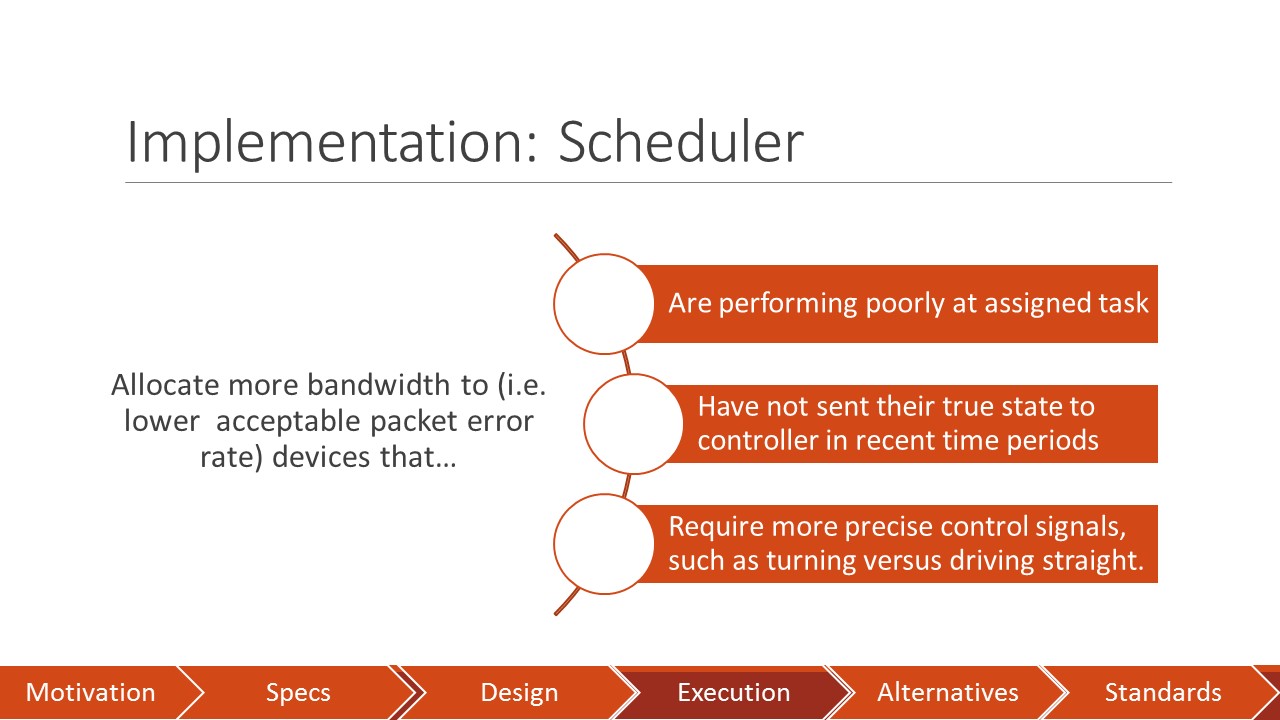
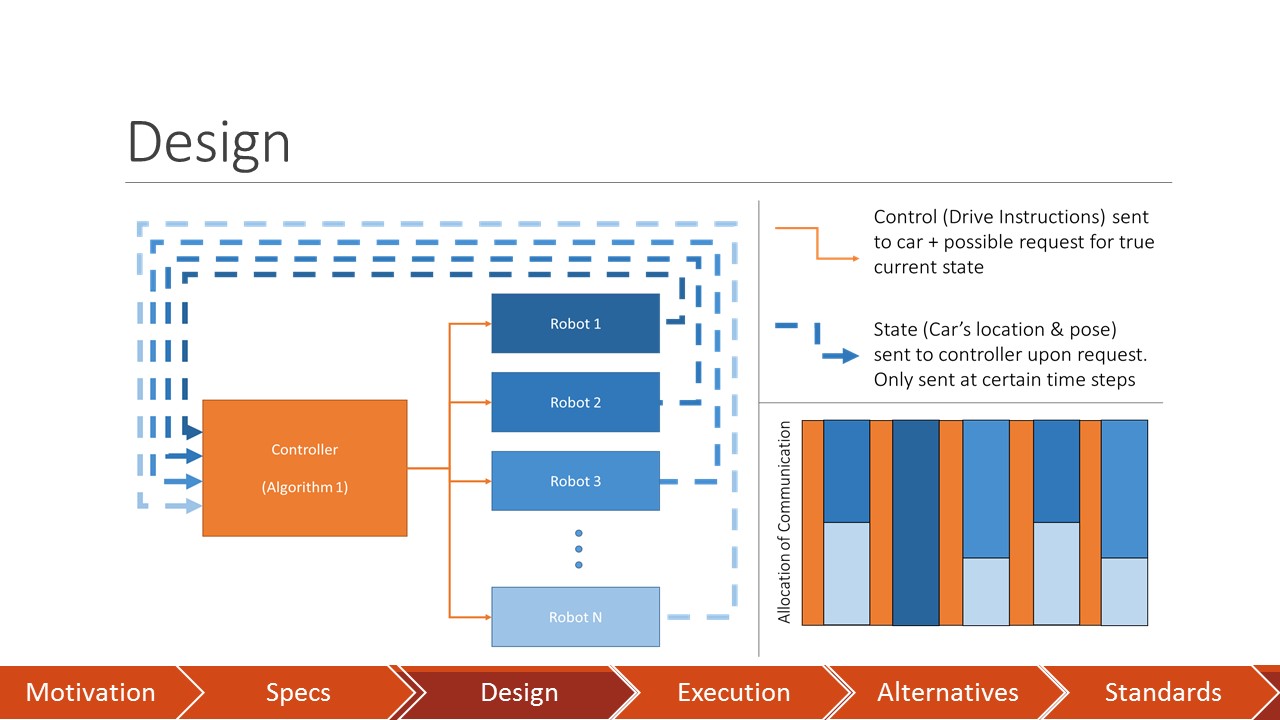
Our goal is to develop a scheduling protocol for low latency wireless communications between robots and a common access point (AP). The access point uses their current position and velocity to direct the robots along pre-planned routes. Because communication happens at high data rates, the resources of the AP are constrained, and it must decide which robots to service every cycle. The communication protocol incorporates the ideas of co - design, with the communication resources allocated based on the current control state of the robots.
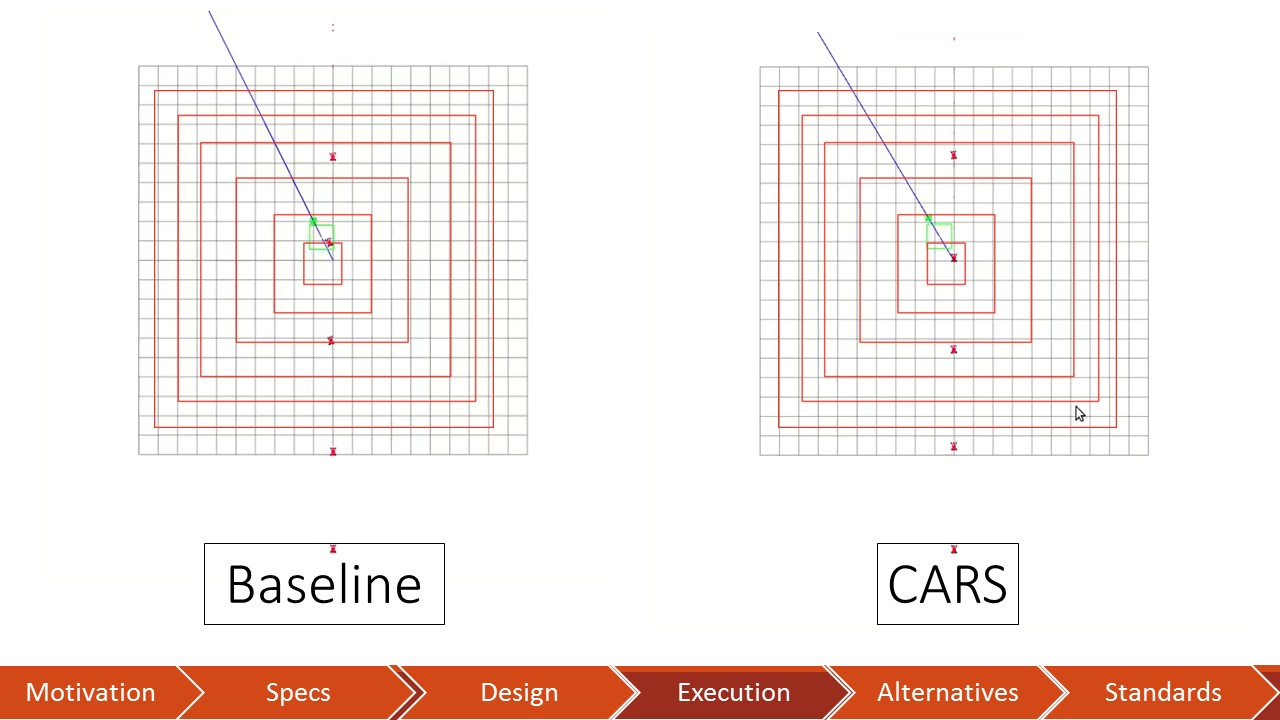
We are using F1/10 cars as our robots, and developing our communications protocol based on WiFi standards, i.e. 802.11ac and next-gen WiFi 802.11ax. The simulations are carried out in Python, ROS, and Gazebo.

Log in or sign up for Devpost to join the conversation.