Inspiration: A late night conversation about how cool OpenCV is and how we would like to give it a shot in a real world solution, as well as a desire to use the plethora of hardware components that we had in our possession. Our dreams were larger than our abilities, but we were able to complete about half of what we had desired from our CarPy system.
What it does: Gathers sensor data from an Arduino to notify driver of close up hazards, and use OpenCV to detect pedestrians in the roadway.
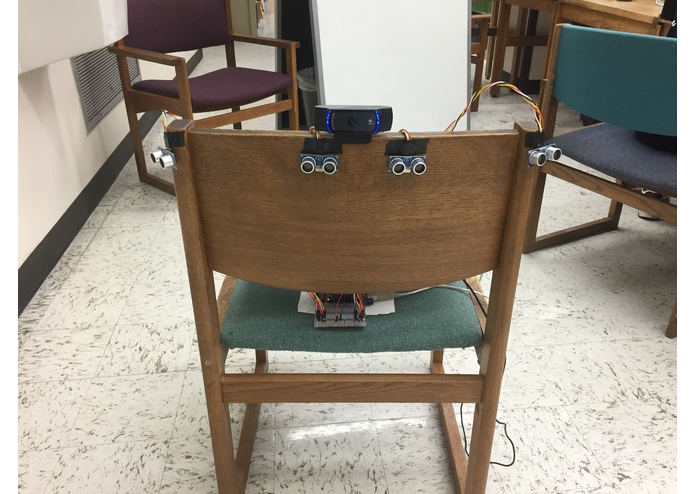
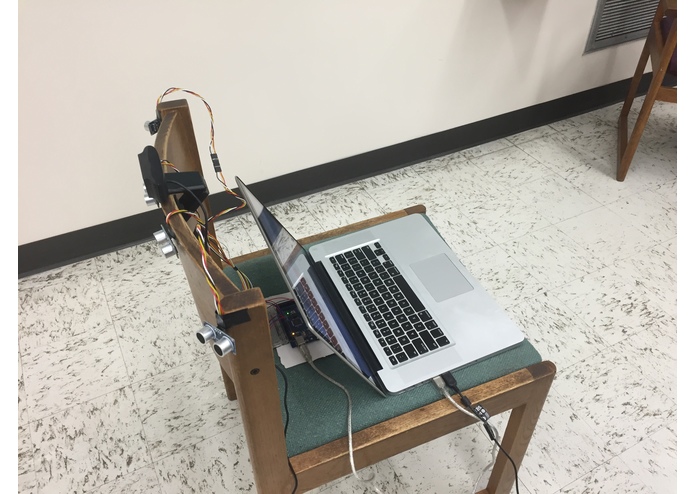
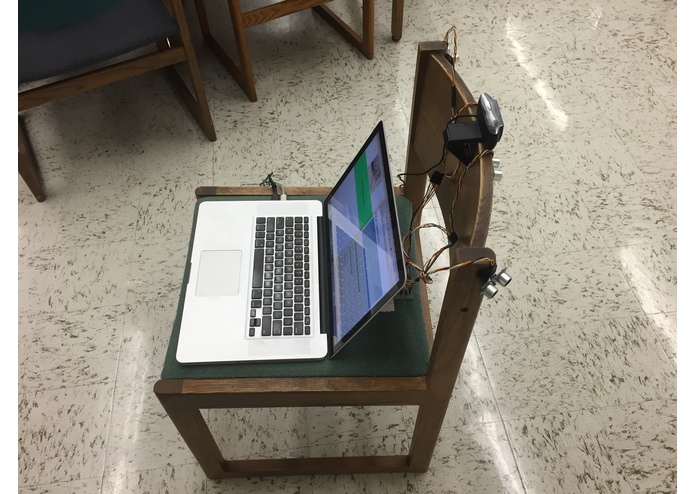
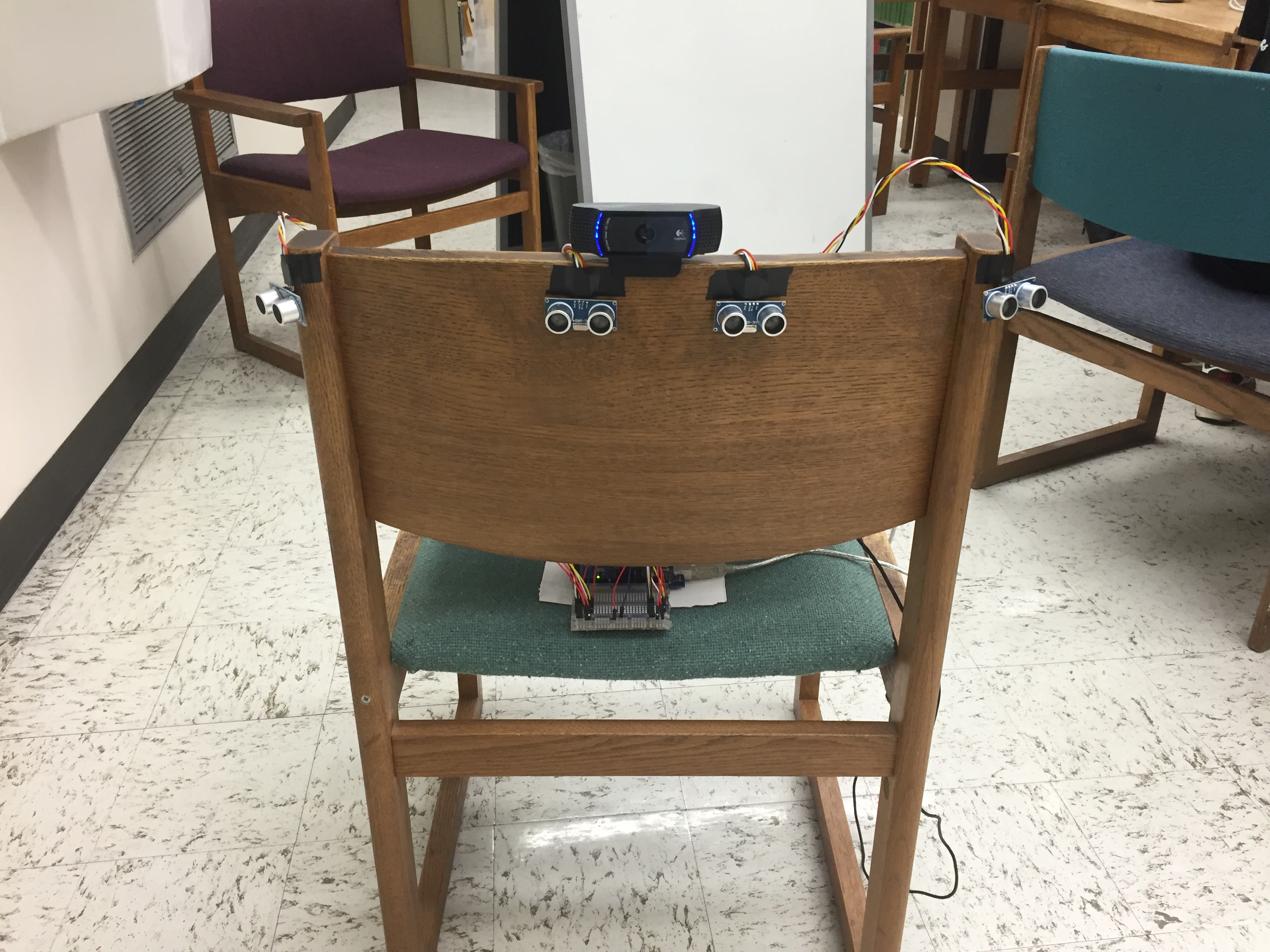
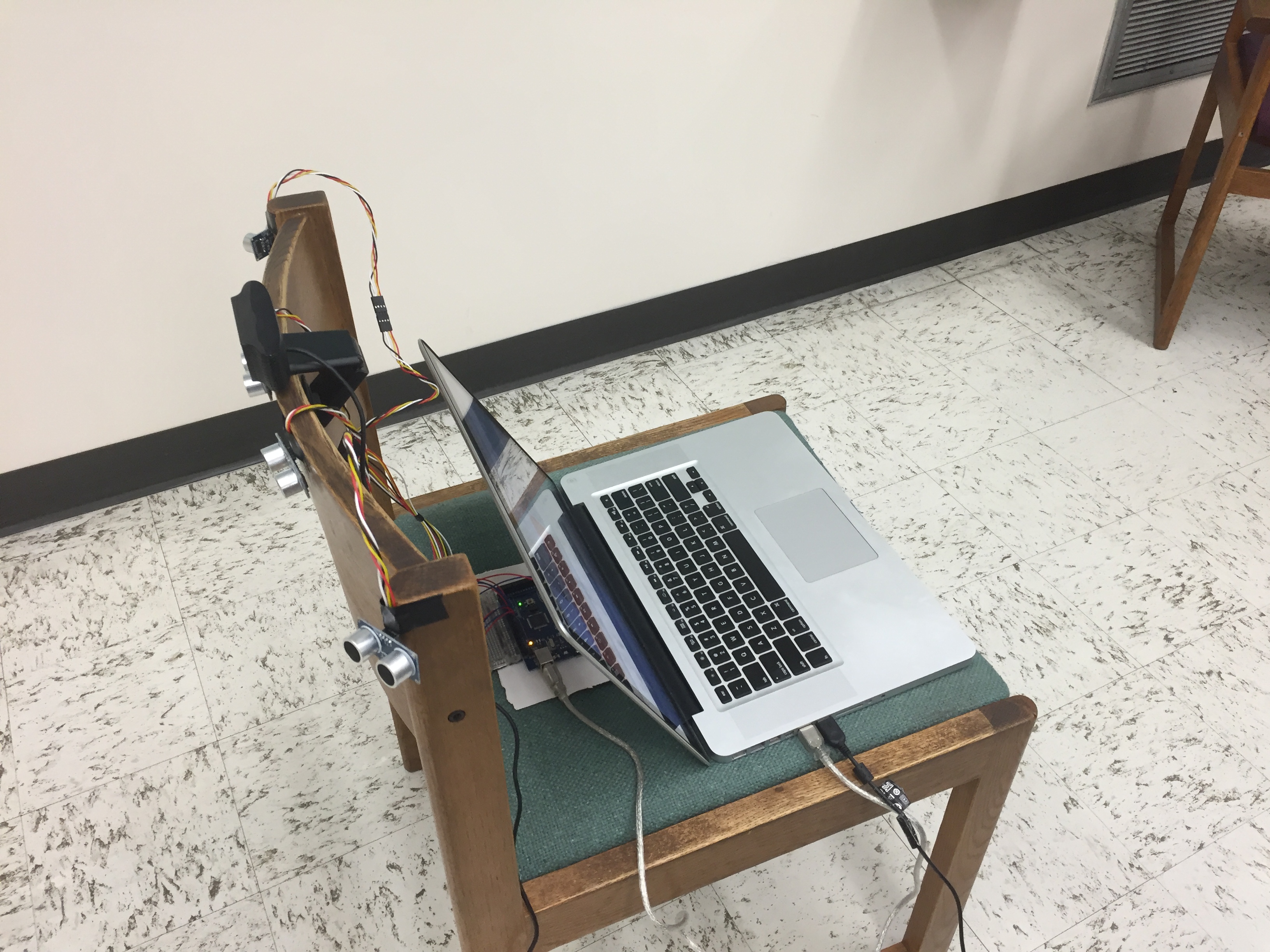
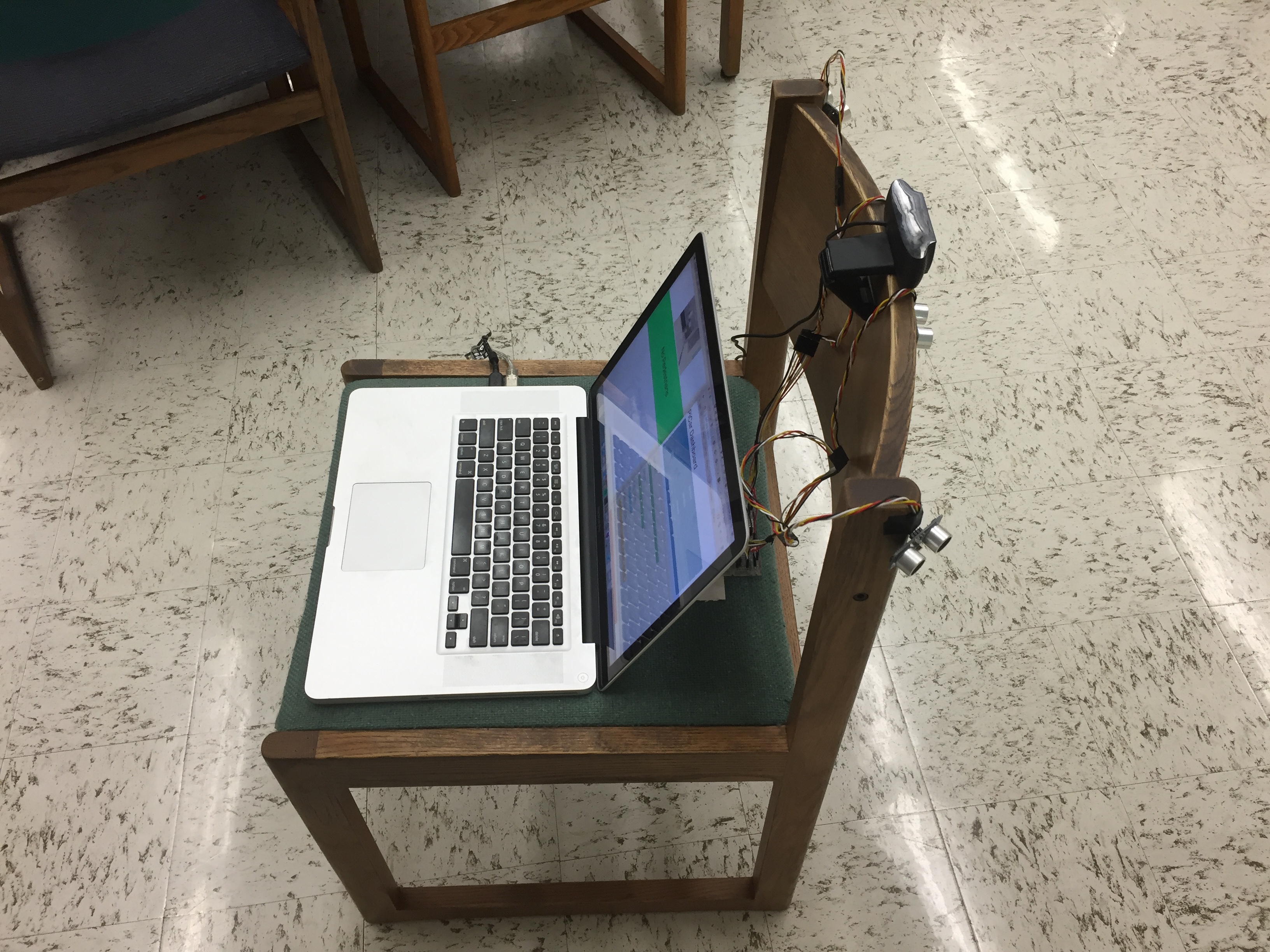
How we built it: We implemented the majority of the project in Python, because we knew that we wanted to be able to port it to the raspberry pi easily. We interfaced with ultrasonic sensors via and Arduino and sent the data over USB to the host computer.
Challenges we ran into: It turns out that if a program can barely run on a high performance laptop, it wont be running on a RaspberryPi. We had hoped to create a low cost computer implementation that could help keep people safe but we learned that something as computationally expensive as image processing needs to be on a full size computer. We also learned that no matter how good you think your software is, the hardware will bite you back.
Accomplishments that we're proud of: Learning how to do something useful with OpenCV. Learning a plethora of information about interfacing with hardware over all kinds of interfaces. At one point or the other we were connecting via Ethernet, USB, Bluetooth, or hardware serial.
What we learned: How to communicate between different experience levels, and cultural experiences.
What's next for CarPy: Install it in a real vehicle and improve upon our algorithms for images as well as physical data.



Log in or sign up for Devpost to join the conversation.