-
-
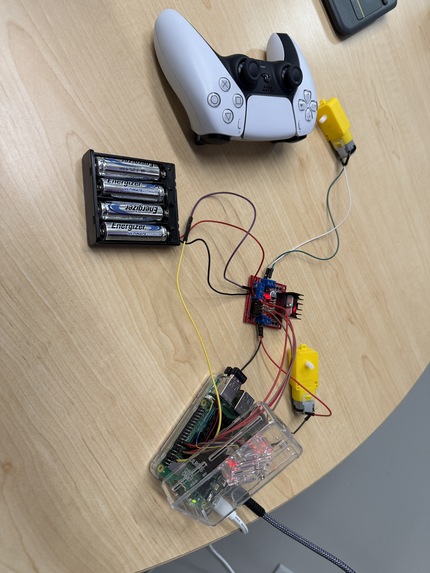
Individual component testing
-

Final Product
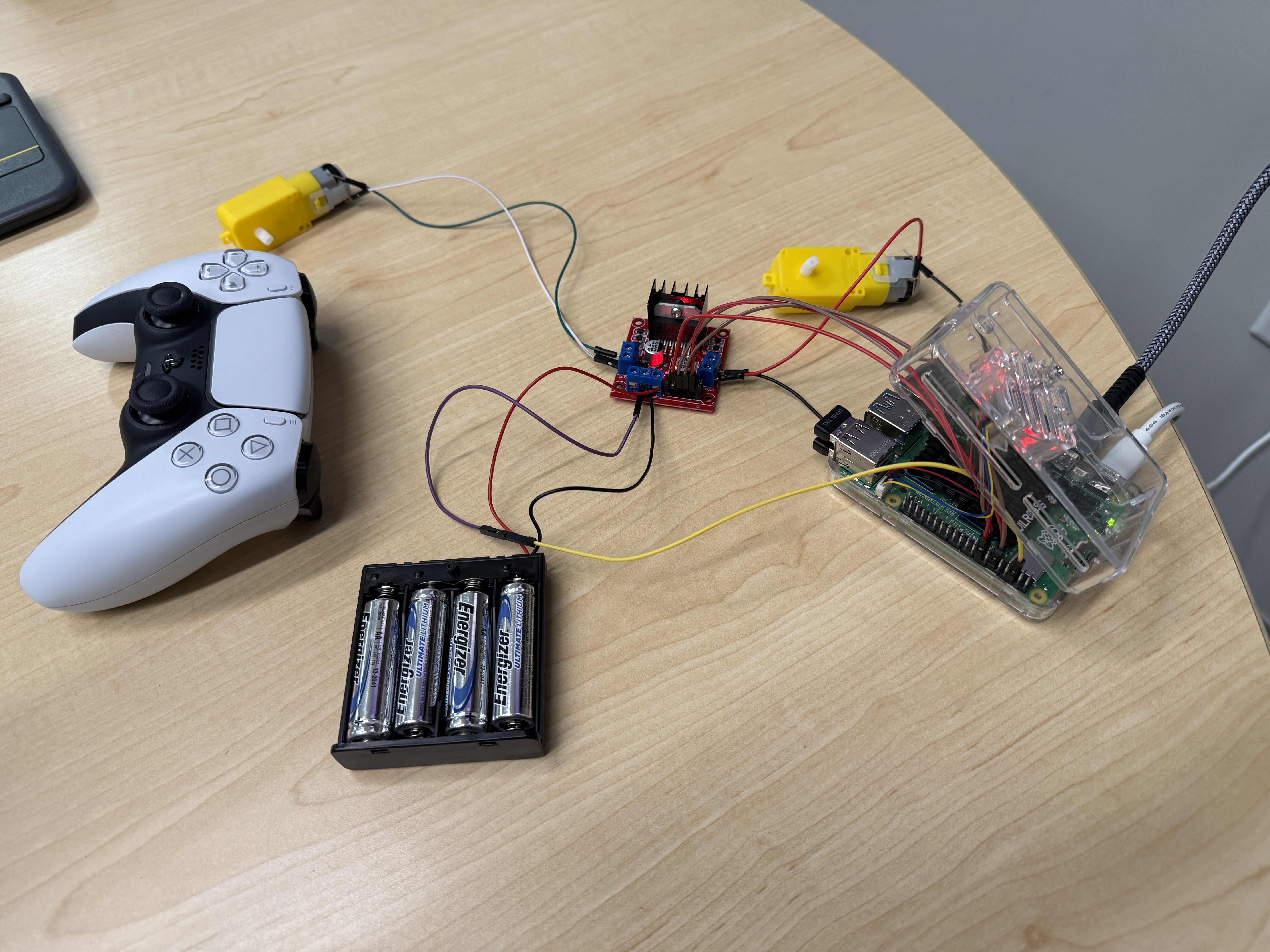

Our project was inspired by the growing need for a recovery rover capable of rescuing drones in harsh terrains with limited access to cellular or GPS signals. For instance, lower points in the Rocky Mountains often lack reliable GPS connectivity, causing autonomous drones exploring the area to become easily lost. Our product, Carl-lite, is a proof-of-concept autonomous rover designed to locate and retrieve drones by establishing direct communication with them and using basic vision systems.
Carl-lite, built with open-source electronics like Raspberry Pi, is engineered to navigate rugged terrain using low-cost motors and retrieve drones with a simple yet effective mechanism. For instances where drones carry sensitive equipment, Carl-Lite can deploy a protective net during retrieval. One significant challenge was ensuring stable power connections for the motors to operate reliably. Despite this, we successfully developed a compact, efficient rover that operates remotely in challenging environments.
This project gave us critical insights into prioritizing core functionalities, avoiding unnecessary complexity, and optimizing the system for real-world conditions. Looking ahead, we plan to integrate a more advanced vision system for enhanced recovery accuracy and efficiency, explore swarm operations for broader coverage, and refine Carl-Lite’s rugged capabilities to better meet extreme environments' demands.
Built With
- linux
- motor
- python
- raspberry-pi
- remote
- ubuntu

Log in or sign up for Devpost to join the conversation.