-
-

The physical trash classifier
-
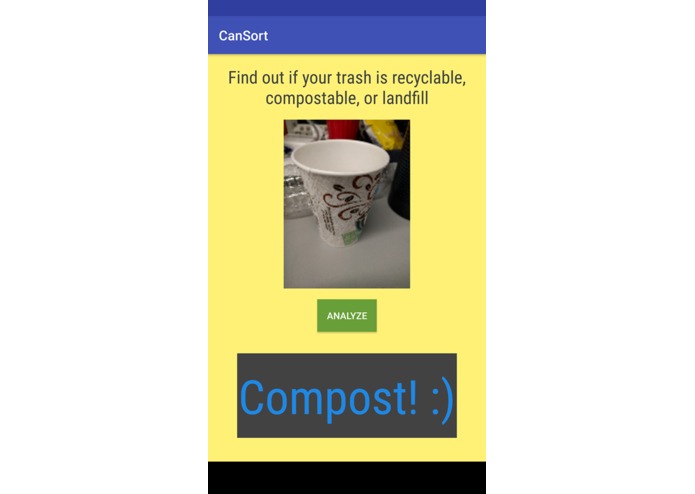
The app detecting a compostable material


Inspiration
We were inspired by how difficult it was for us to simply recycle. When we were faced with the choice standing over a trash can, it would invariably be an involved decision. We wanted to automate that so we can move on with our daily lives while still protecting the environment
What it does
Our hack is in two parts -- a trash attachment and a phone app. The trash attachment detects an object using a mounted proximity sensor. This triggers the script to take a picture of the trash, and analyze it for what category it would land in. Then using a 3d printed mount, we would carefully dispense the trash into the correct bin -- Recycling, Landfill, or Compost.
If there is no trash component, then the user can simply open up our app, snap a picture, and be told within split seconds which bin to toss the item into!
How We built it
We used Python and the Arduino programming language for the backend, and various hardware tools.
Challenges We ran into
Mechanical Engineering is not our strong suit. We ran into a lot of issues trying to make the mechanics of the hack actually work.
Accomplishments that We're proud of
We built tools that would work for people, even if they don't have our fancy gadgetry!
What I learned
Do Mechanical work ahead of time, coding is easier.
What's next for CanSort
Sorted trash, but for dogs. And a more realistic physical implementation of the device.



Log in or sign up for Devpost to join the conversation.