-
-

brainstorming
-

working
-

engineering
-
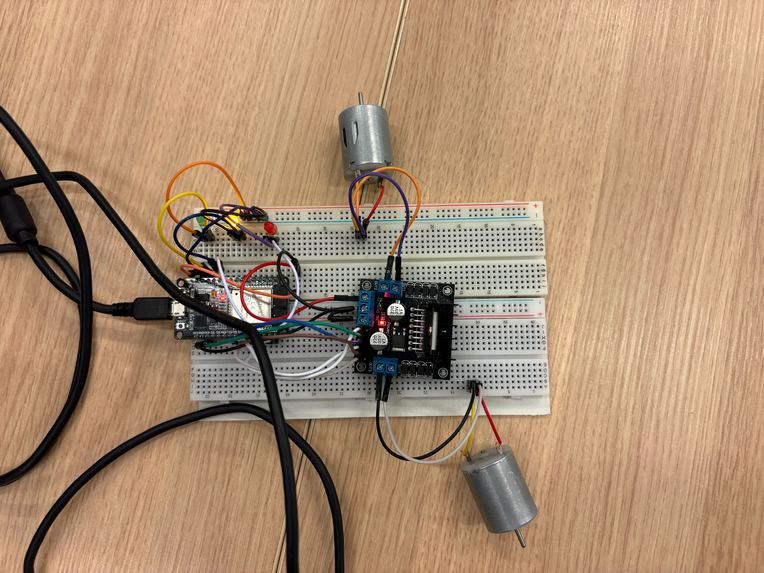
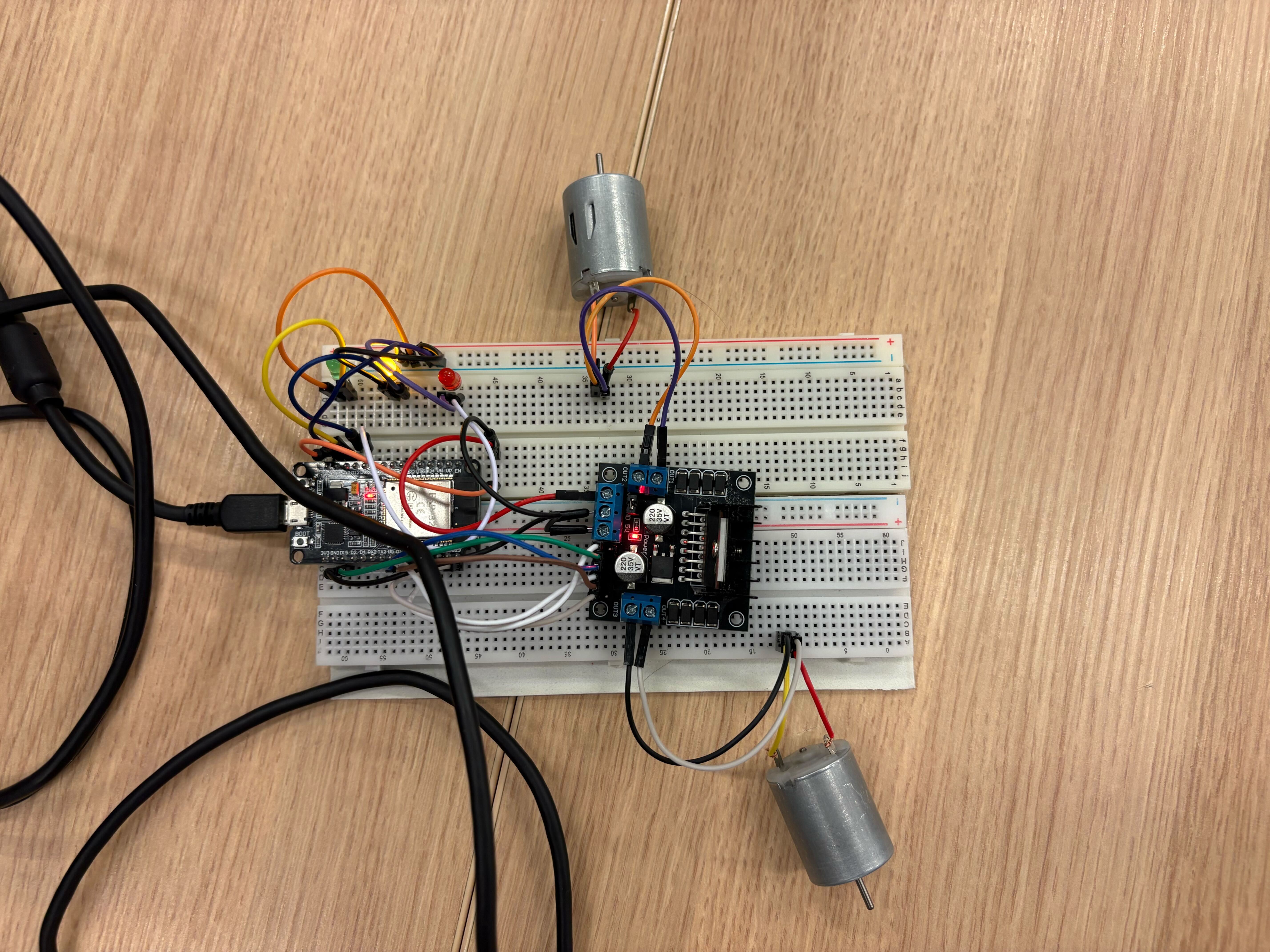
electronics
-
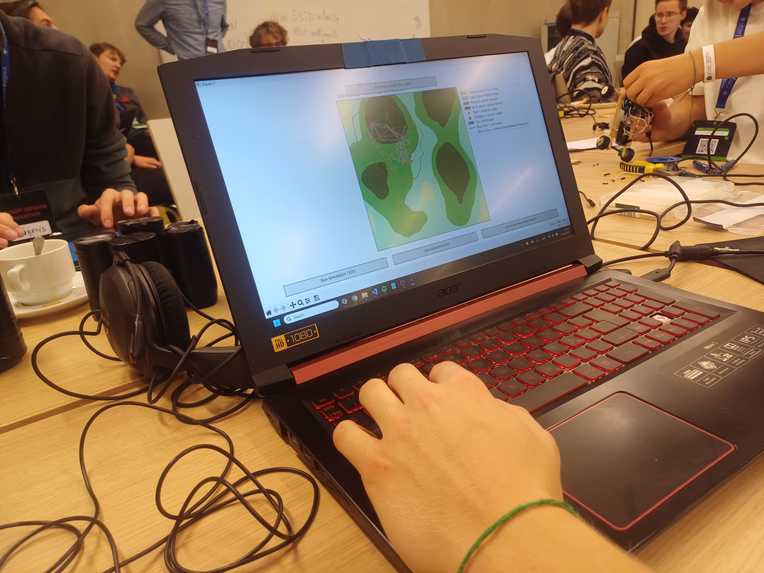
simulation
-
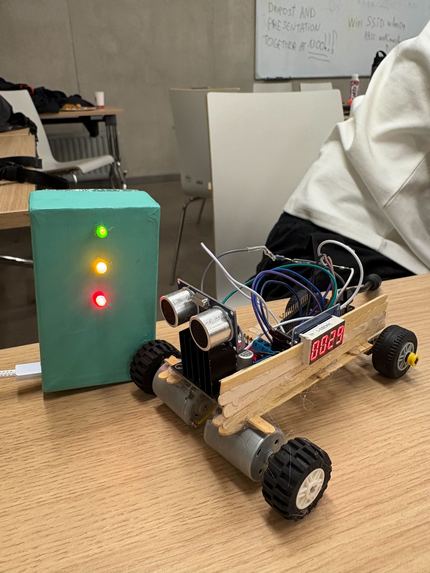
prototype




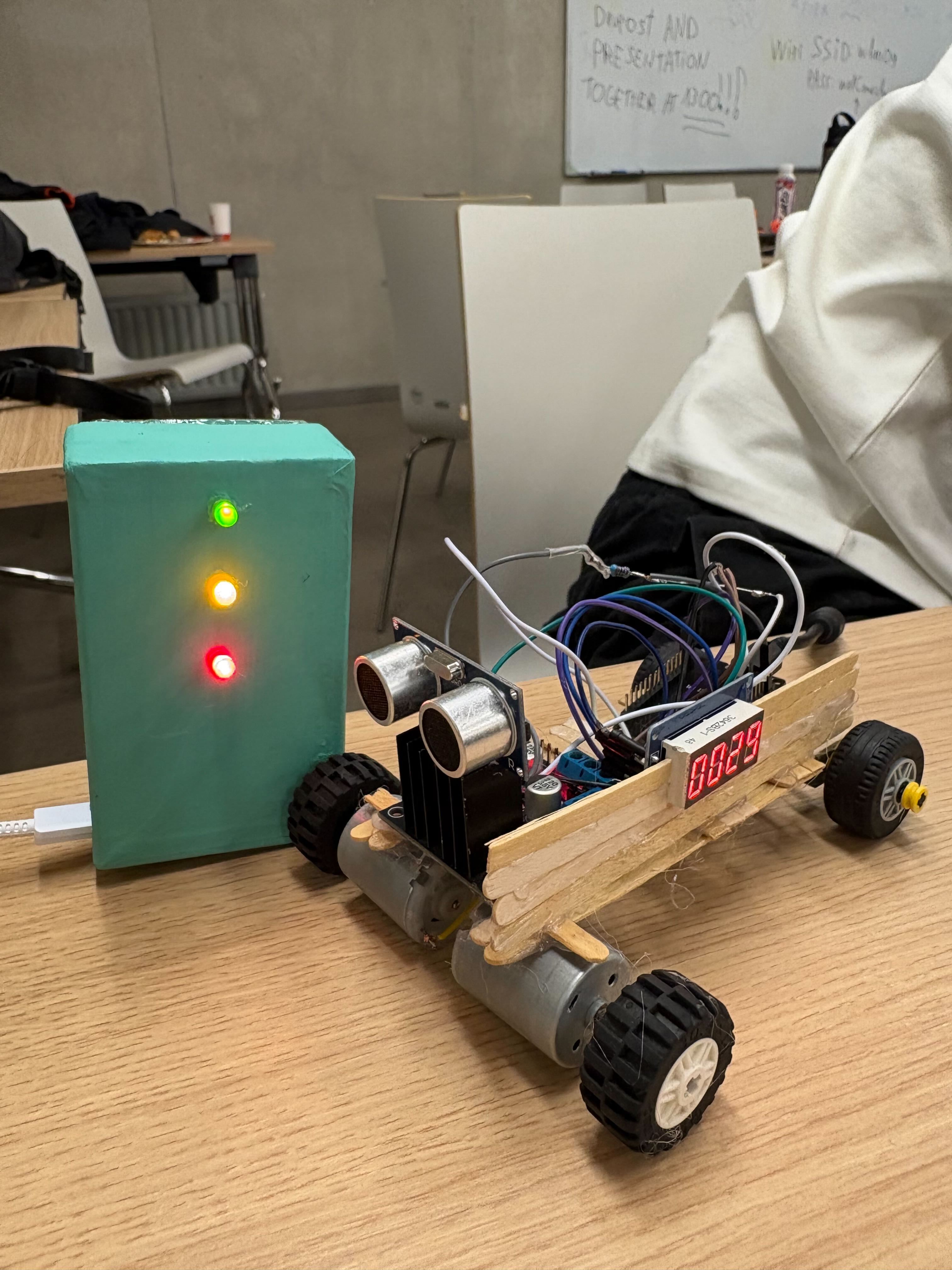
Inspiration:
Cannon, Modern Warfare, Estonian delivery bot, Drones, Low-profile resupply problem, Seer (from the game Apex Legends), Killjoy (from the game Valorant)
What it does:
When a unit secures a new area, they need supplies now — not in hours. A drone is launched over a large area. Alternatively, we use optic fiber in case of heavy network jamming. Our mesh is air-dropped — each beacon lands (for example, on trees or the ground) and acts as a positioning anchor. Together they form a Local Positioning System that allows precise navigation for unmanned supply vehicles (such as a resupply robot) through any environment even when GNSS and networks are down. It's a fst, low-profile resupply for the frontline.
How we built it:
At first, we threw a bunch of ideas targeting different challenges and problems at the wall trying to see what sticks. We managed to choose two of the most promising ideas and merged them together. We started by doing theoretical base research, consulting military personnel about the issue we were solving. We also researched the market, trying to figure out if our idea could realistically be done, and if it hadn't already been done. After completing a solid base, we consulted experts, trying to find any threats or issues with the solution. We received valuable questions and ideas, which helped us out a ton. The rest of the time was spent on more practical stuff, such as creating a simulation, a demonstration, a presentation, and a pitch.
Challenges we ran into:
First time attending hackathon — we felt like fish out of water. DC motors were too weak for the miniature resupply robot prototype to move itself. Lack of required gear, such as: microcontrollers, transmitters, 3D printer for encasings.
Accomplishments that we're proud of:
First time participating in a hackathon! Got to use our skill sets in a real environment! Overcame any problems in the process by quick thinking. Created a really cool and promising concept! Developed a pretty cool beacon deployment and self-healing digital simulation.
What we learned:
Since this was our first hackathon ever we learned about the process of thinking of and executing an idea from the ground up within time constraints and the frame of a challenge. We learned how to efficiently use different resources available to us, for example learning to create a simulated digital environment in which to showcase our idea. Our experience with teamwork and time management definately helped us a lot too. We learned how to use platforms we had never used before, like, Slack and Devpost. We also did research on UWB and local positioning systems.
What's next for BRANCHLINE:
The next steps would be continuing to develop our idea further, expand from it and consider different possible implementations of our product. (1-3 months) To realise MVP - add multiple beacons, improve backend and frontend developement (4-6 months) Conduct field test, seek partnership and sponsors (7-18 months) Integration with mobile apps and supply UAVs (18-36 months) Full autonomous swarm deployment and self-healing system





Log in or sign up for Devpost to join the conversation.