Inspiration
I have an uncle who is legally blind, and someone needs to be watching over him at all times. Everyone is always worried for his safety, and he has virtually no physical independence. What we hope to fix for him and all other blind people is giving these people vision, so they can be safer and more independent.
What it does
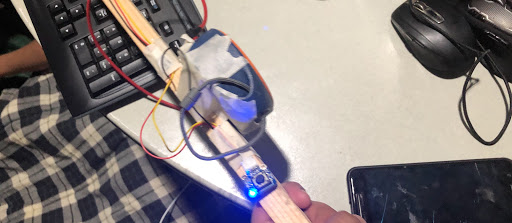
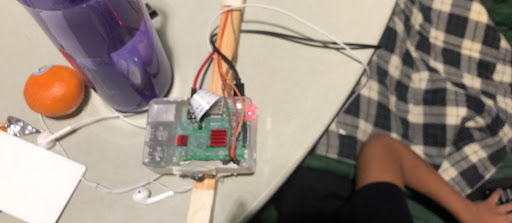
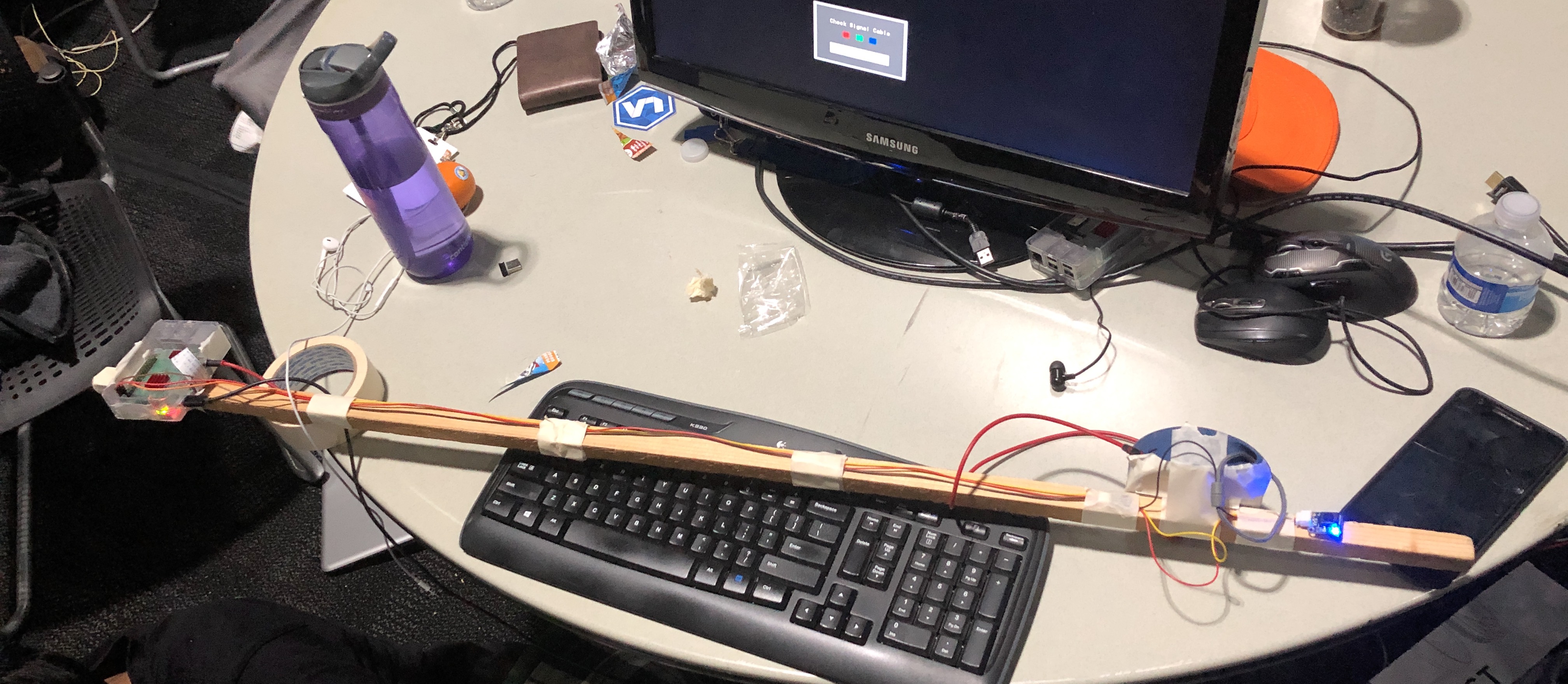
The cane has a camera at one end and a speaker and button on the other end. When you run the program and press the button, it takes a picture and the speaker reads aloud what object is in front of you using a machine learning object detection model and a text to speech algorithm, both of which are provided by google. Temporarily, we have the data sent through a socket to a server that talks to google because if the RPi talked to google itself, it could overwhelm the RPi and fry it. So essentially, you press a button and the cane takes a picture of what's in front of you and then says it aloud.
How we built it
We used java, sockets and an RPi. We used the jrpicam module to take a picture, which is a java version of the picamera python module, which has the ability to control a RPi camera extension. We used the omxplayer bash command to play an mp3 noise. To send the image to the computer that talks to the cloud and receive the image, we used java sockets (probably the most frustrating API of everything we used). Finally, we used GCP to convert the image into an mp3 that says the object in the image.
Challenges we ran into
We ran into a plethora of challenges. First, the LosAltosHacks router doesn't allow for peer-to-peer connections so we had to use our own hotspot. Also, the java sockets are broken and refuse to work without the code being completely absurd. To send an image, you would call the sending function once, but to receive the image, you would have to call the receiving function thrice and ignore the second two return values because they would be null. If it was in a while loop, one in every three images received would be null for some reason. After solving that bug with some stupid code, we ran into the issue of sending the mp3 back. Java sockets are buffered, and send/receive data piece by piece. However, there's no way to tell the receiving buffer to stop receiving. We ended up putting a Thread.sleep(500); and then sending one byte to close the receiving buffer. This would prevent this byte buffer from joining with another buffer, so the receiver end could differentiate the packet as a lone, useless bit and exit the receiving buffer loop. By then, our brains were already fried. We had no idea how to play a sound on the RPi for 30 minutes until we came across omxplayer, but that was in bash, not java. However, that was now problem for Runtime.getRuntime().exec().
Accomplishments that we're proud of
We're very proud to have finished the project. We worked together and we could solve the problems peacefully, despite how frustrating our issues were.
What we learned
It's most productive to solve problems peacefully, rather than yelling and swearing and showing frustration towards every setback. Talk to the team about the problems in a civil way, and it will be so much easier.
What's next for CaneCompanion
- make the cane recite the direction of the object by getting its position on the image
- make the cane detect more than one object.
- put all the code on the RPi
- fix the sockets (they work but the can be better. this change will only be if we ignore the one above)
Built With
- java
- rpi
- socket


Log in or sign up for Devpost to join the conversation.