
Inspiration
Assistive Tech was our asigned track, we had done it before and knew we could innovate with cool ideas.
What it does
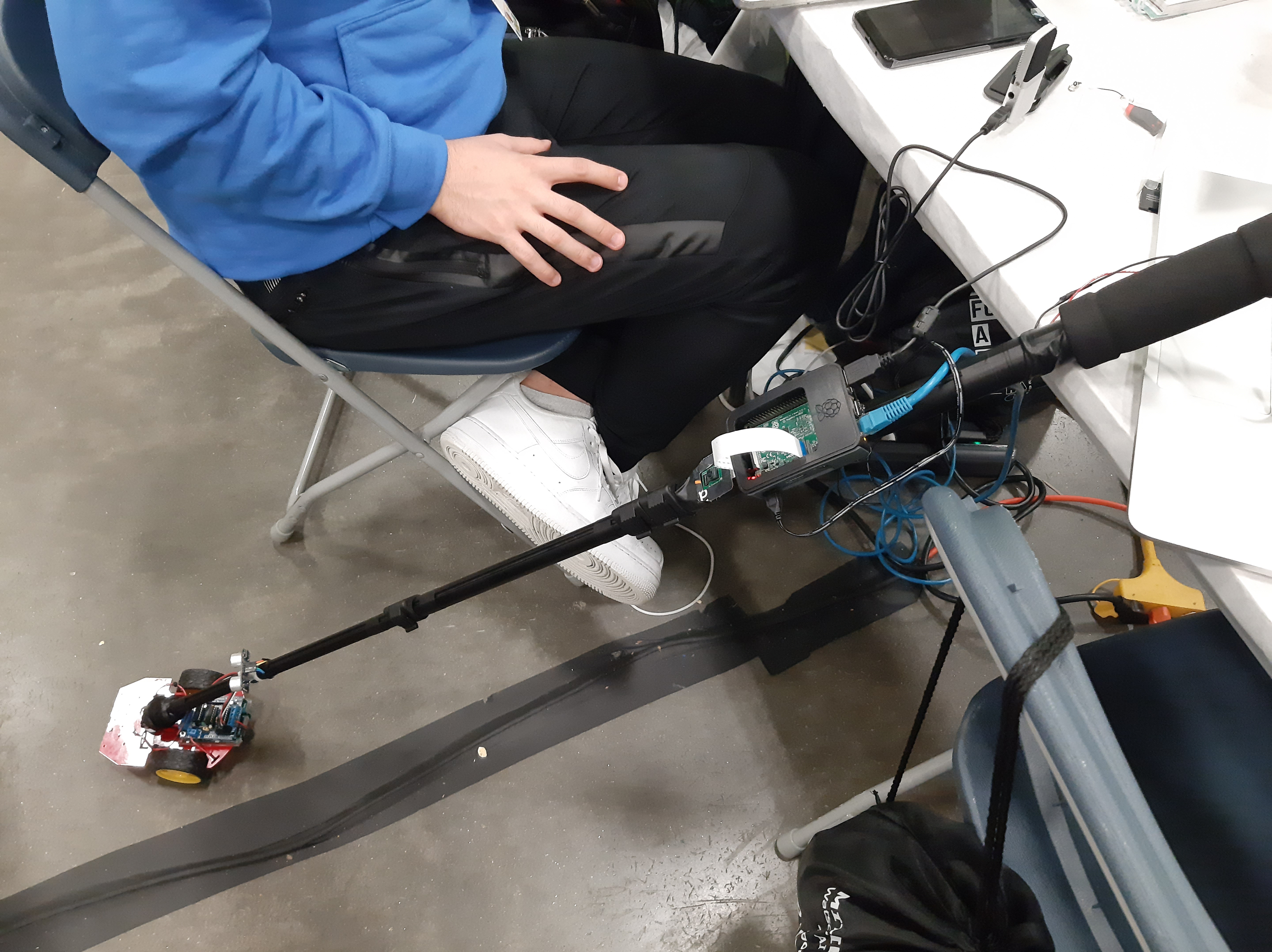
It adds a camera and sensors which instruct a pair of motors that will lightly pull the user in a direction to avoid a collision with an obstacle.
How we built it
We used a camera pod for the stick, on which we mounted the camera and sensor. At the end of the cane we joined a chasis with the motors and controller.
Challenges we ran into
We had never used a voice command system, paired with a raspberry pi and also an arduino, combining all of that was a real challenge for us.
Accomplishments that we're proud of
Physically completing the cane and also making it look pretty, many of our past projects have wires everywhere and some stuff isn't properly mounted.
What we learned
We learned to use Dialog Flow and how to prototype in a foreign country where we didn't know where to buy stuff lol.
What's next for CaneAssist
As usual, all our projects will most likely be fully completed in a later date. And hopefully get to be a real product that can help people out.
Built With
- arduino
- dialog-flow
- raspberry-pi



Log in or sign up for Devpost to join the conversation.