-
-
 GIF
GIF
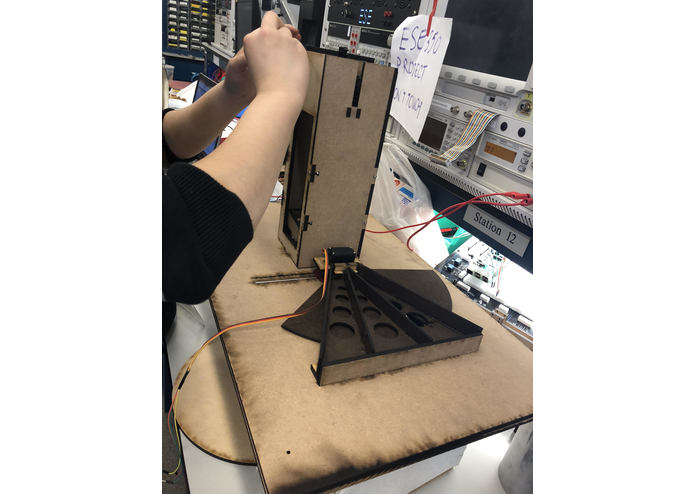
Our project demoed in Baseline Demo: initial syringe moving up and down, and the system working in entirety.
-
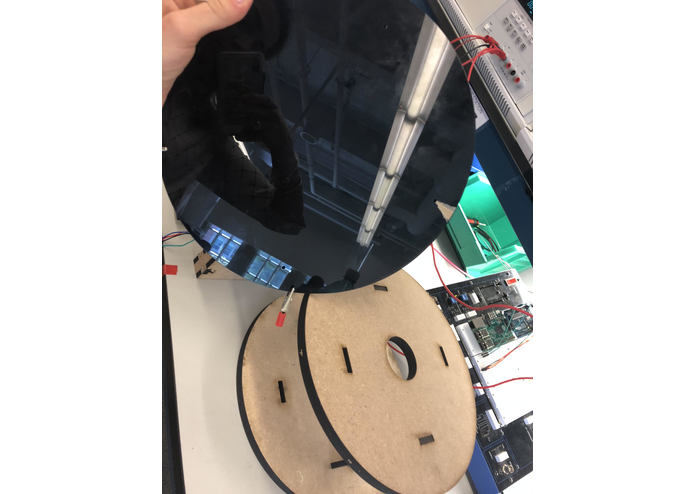
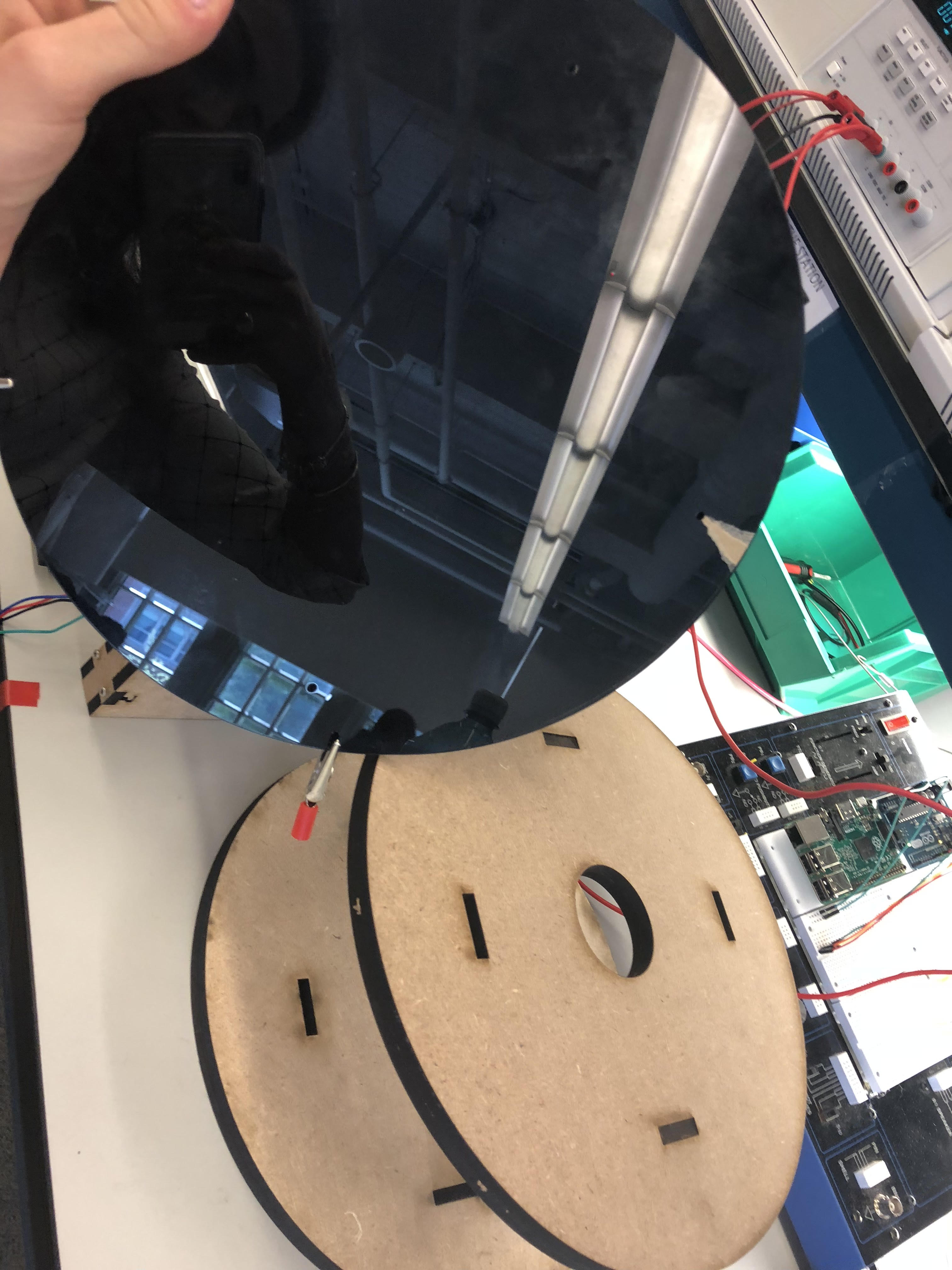
Our fake cake on the left for testing purposes and the turntable we have cut in RPL.
-
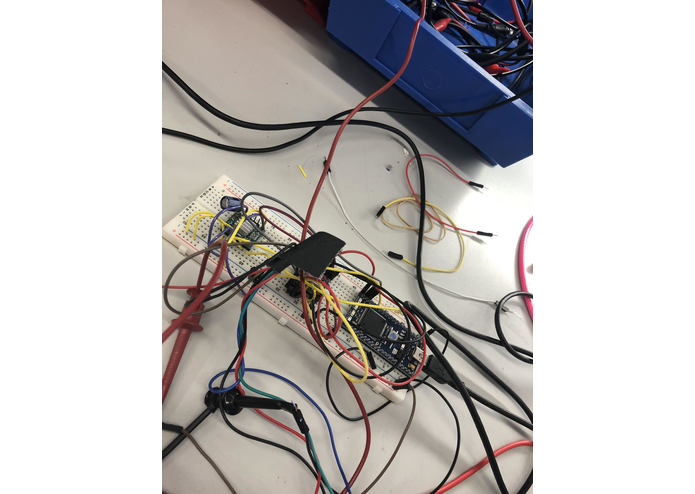
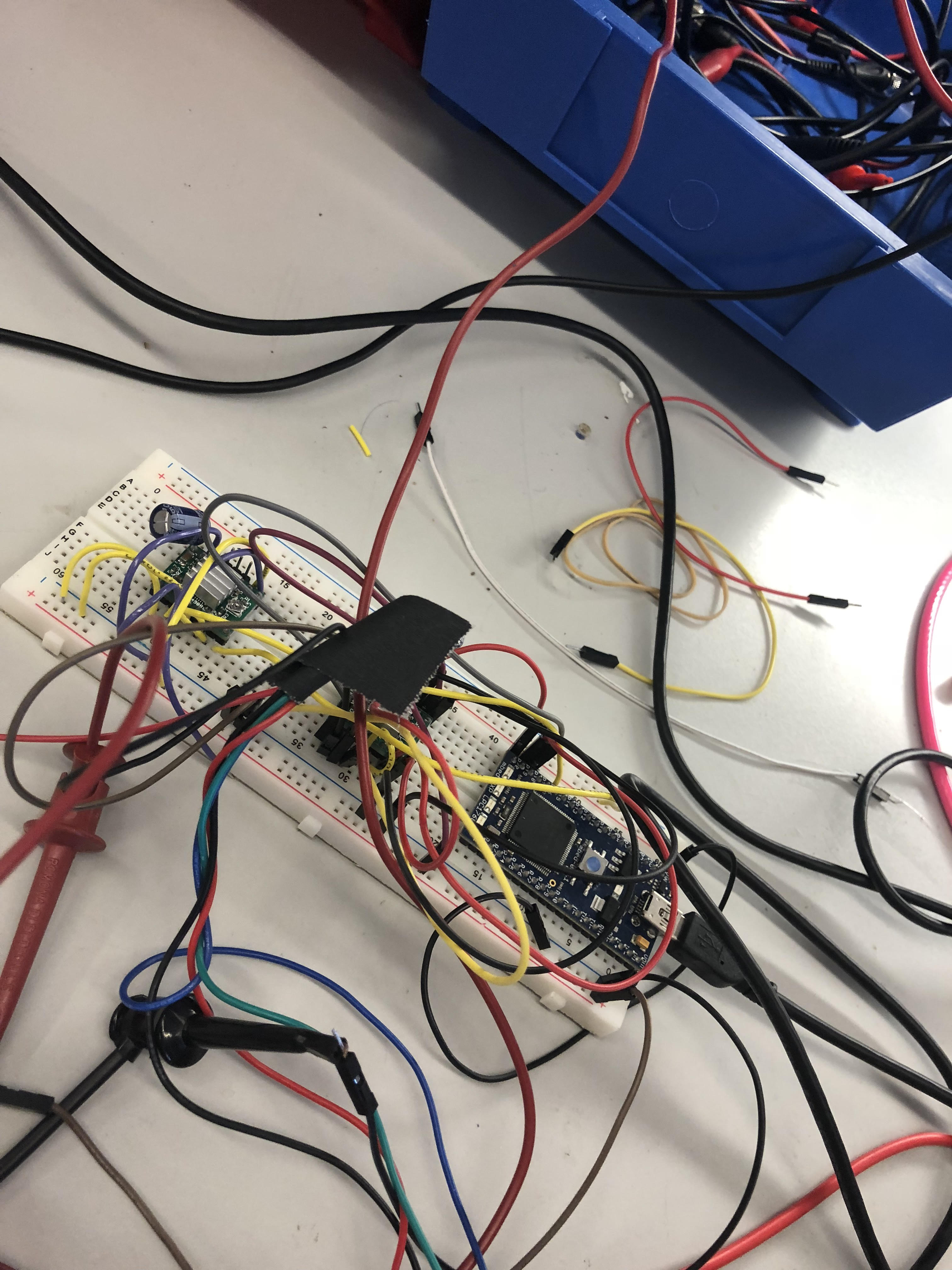
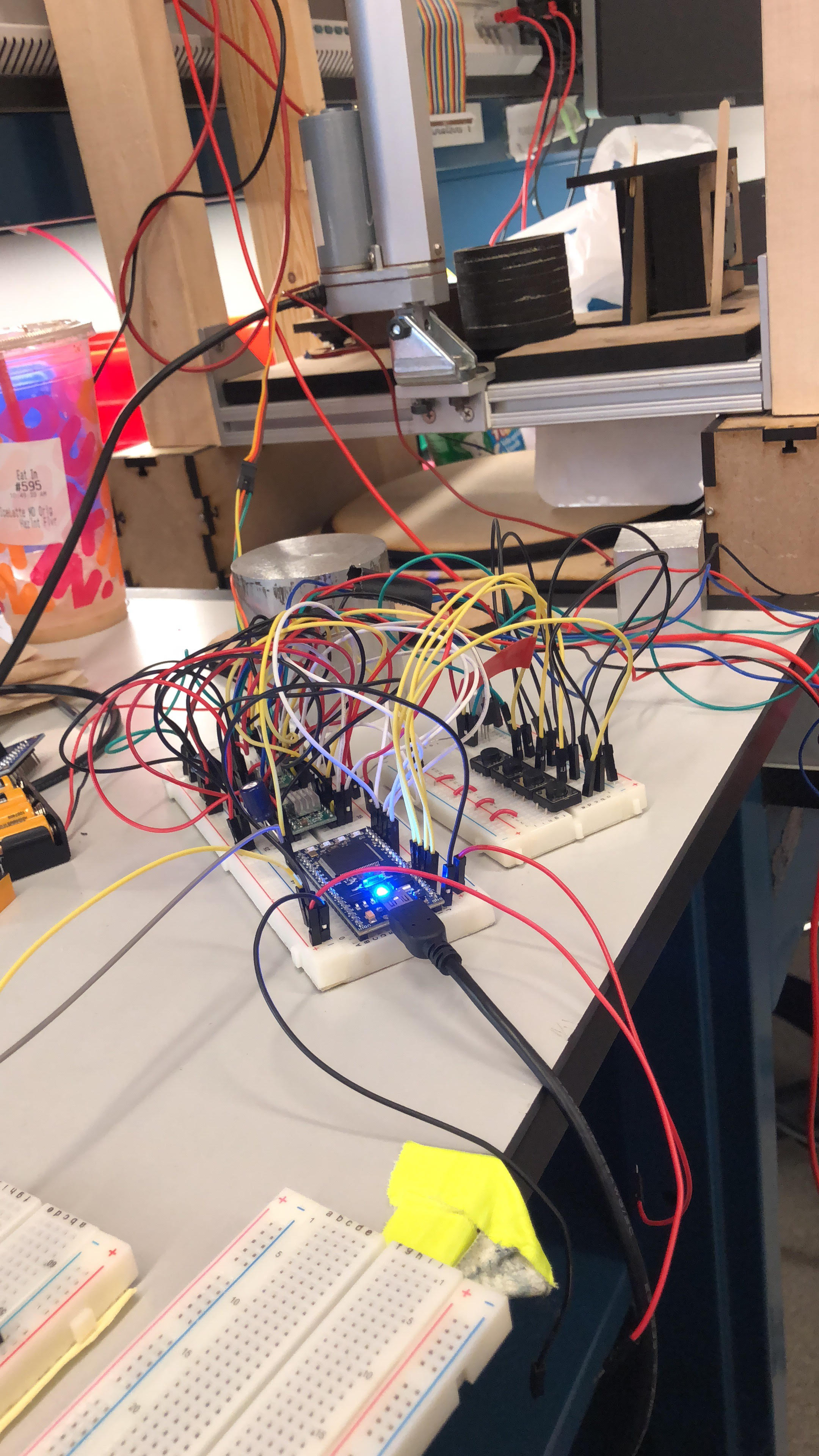
Our MBED setup with 2 stepper motors and their drivers attached.
-
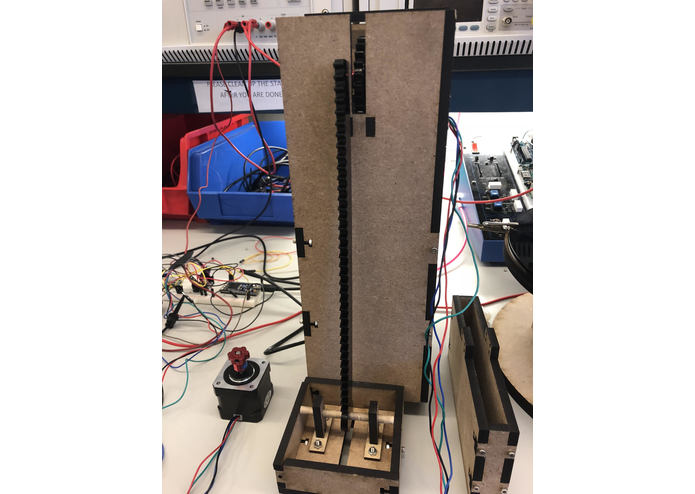
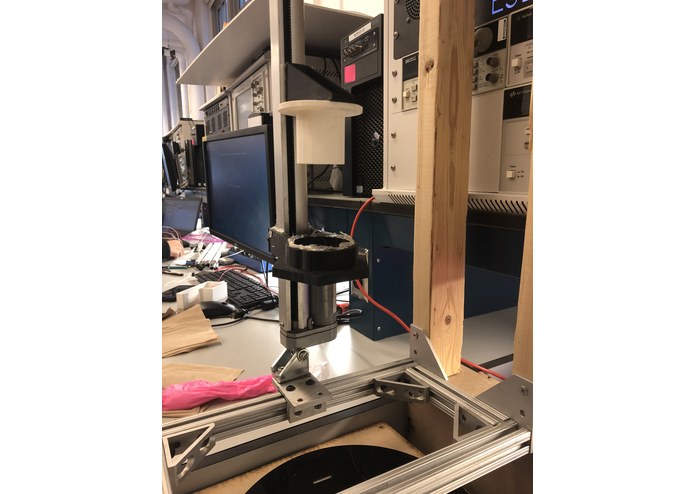
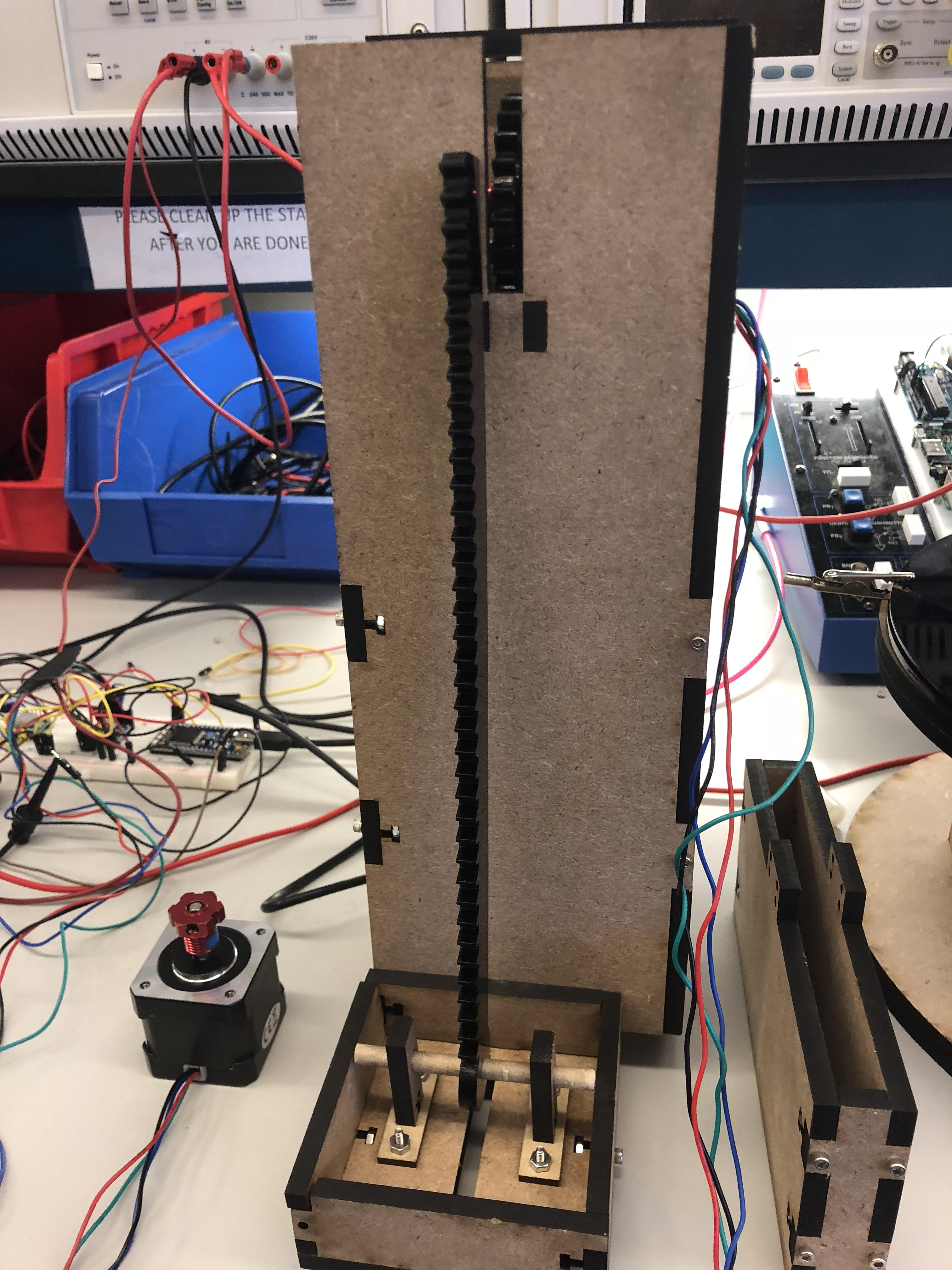
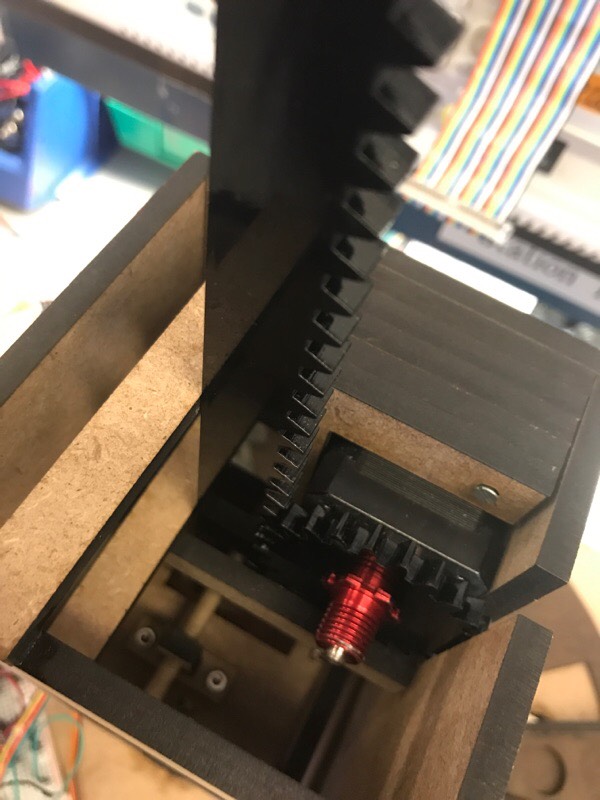
The syringe structure. The stepper motor hinge is visible. Inside is a vertical gear mechanism.
-
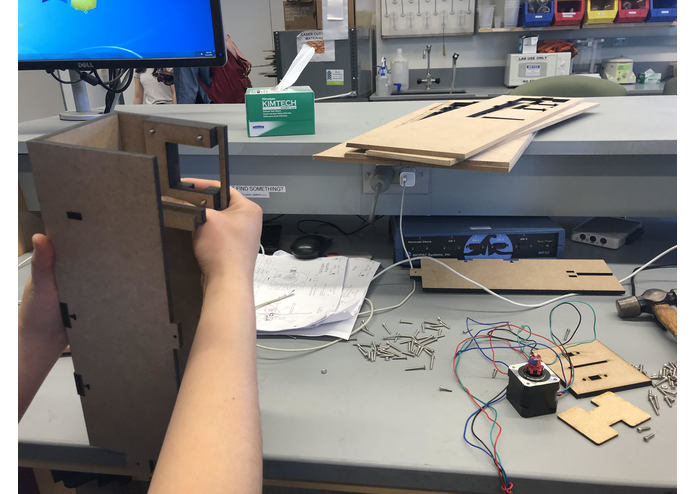
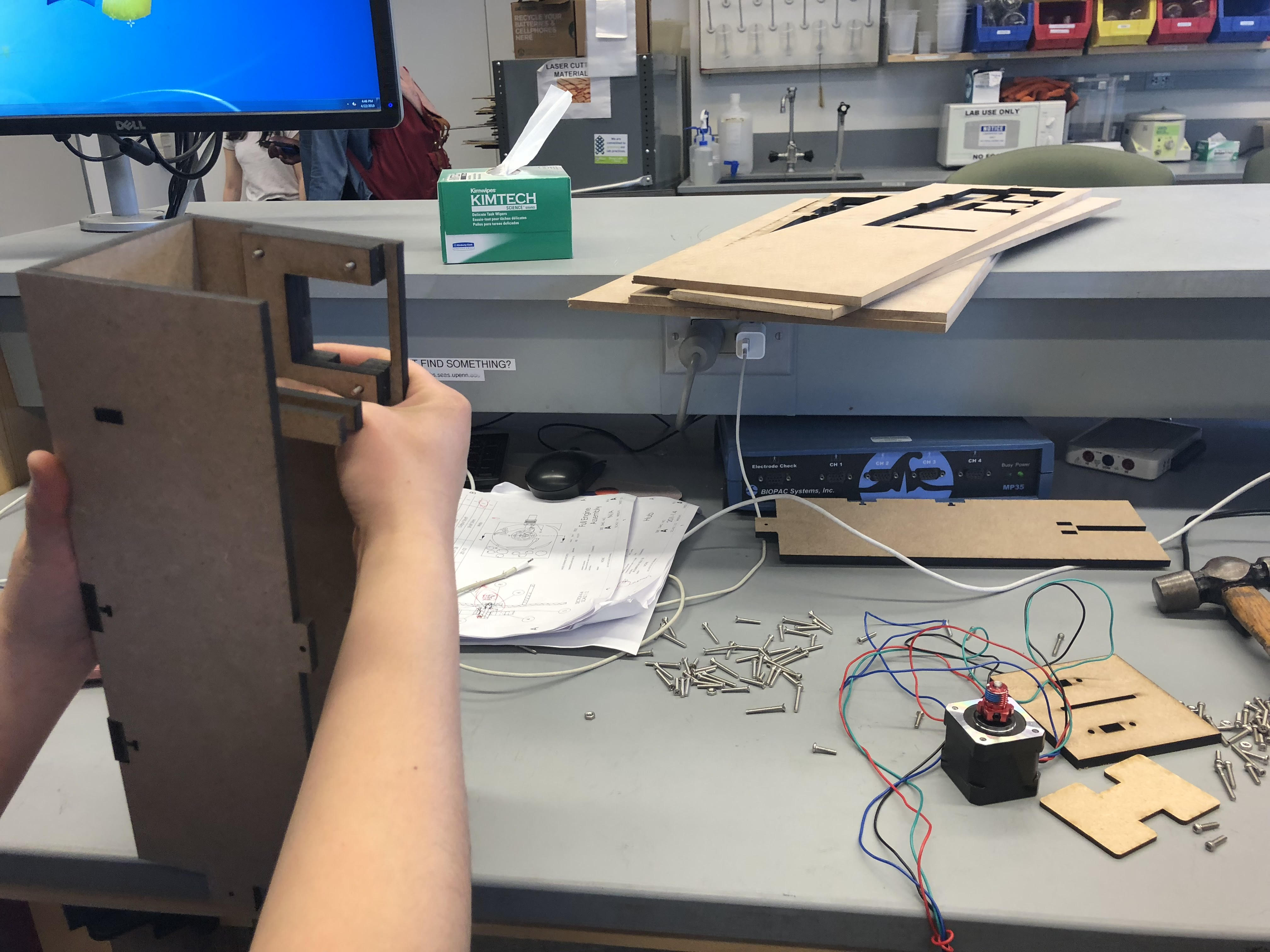
Initial developments in our syringe, cutting and assempling in RPL.
-
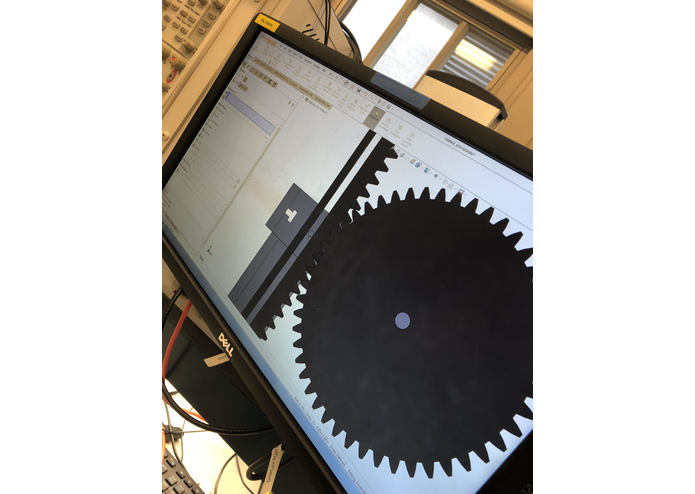
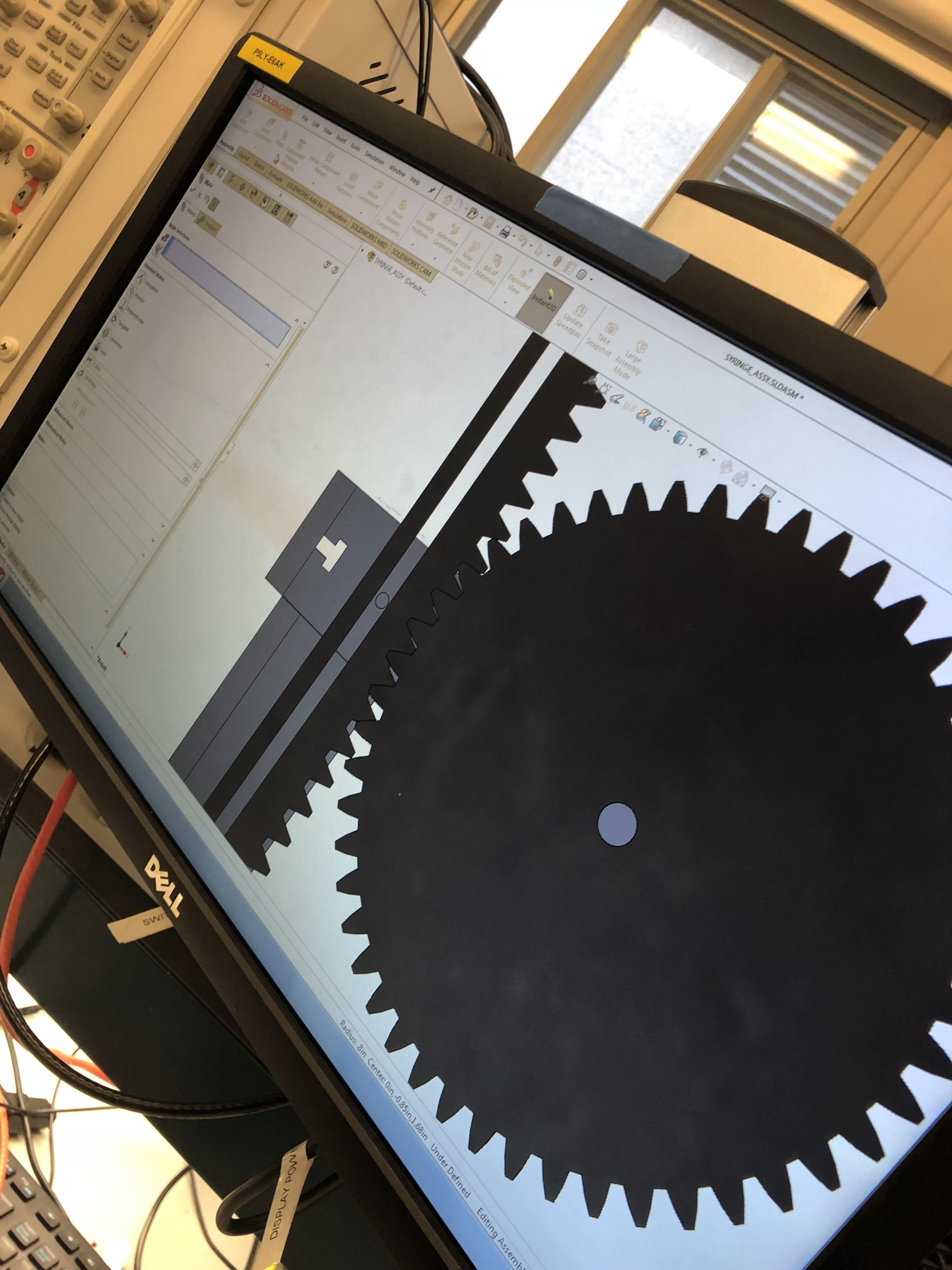
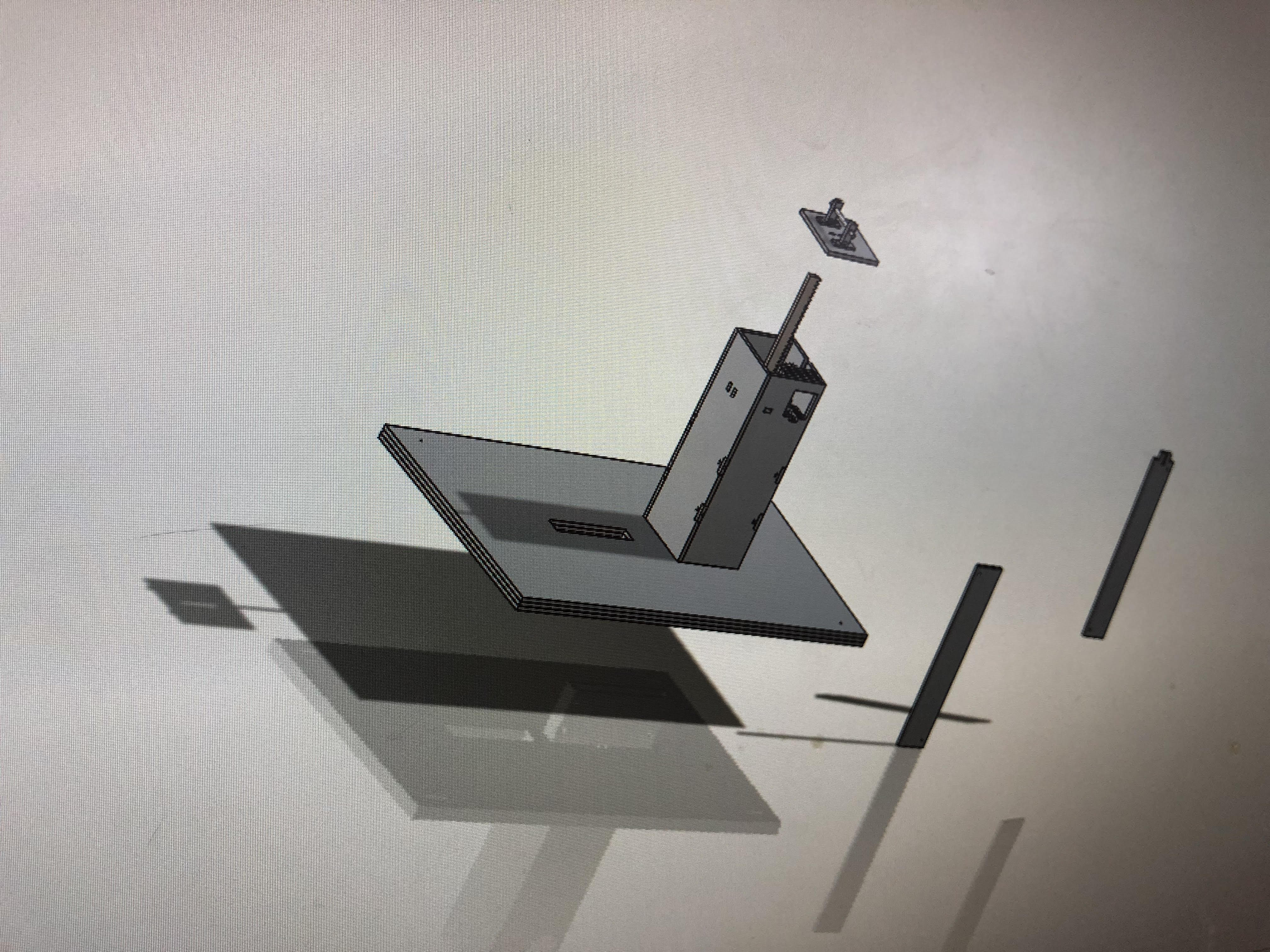
SolidWorks CAD of the vertical gear structure.
-
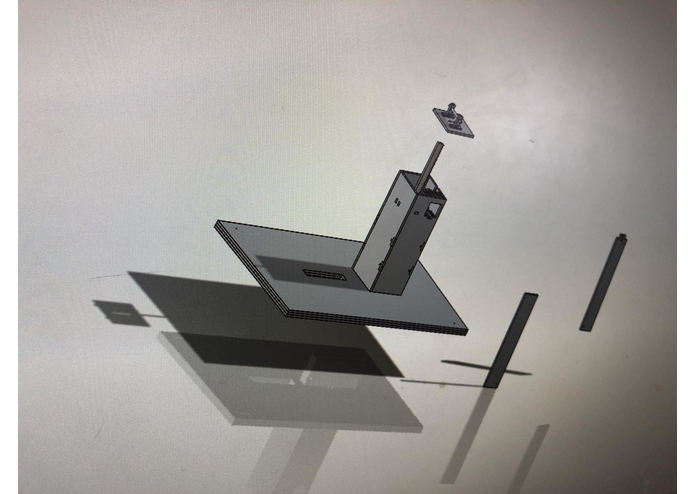
Layout of our base: note that this is an initial plan.
-
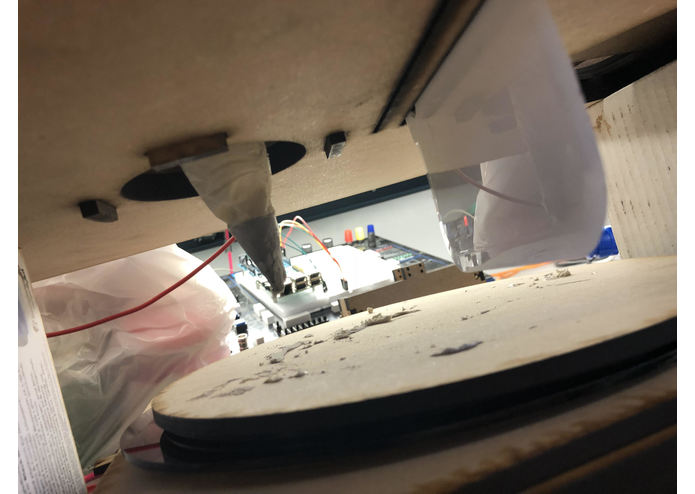
The frosting tip over the fake cake, initial testings. The spreader blade is extended downwards from a slit carved in the base.
-
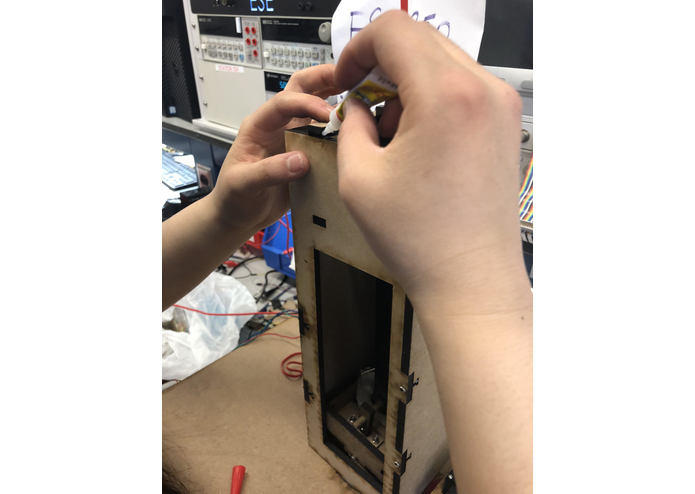
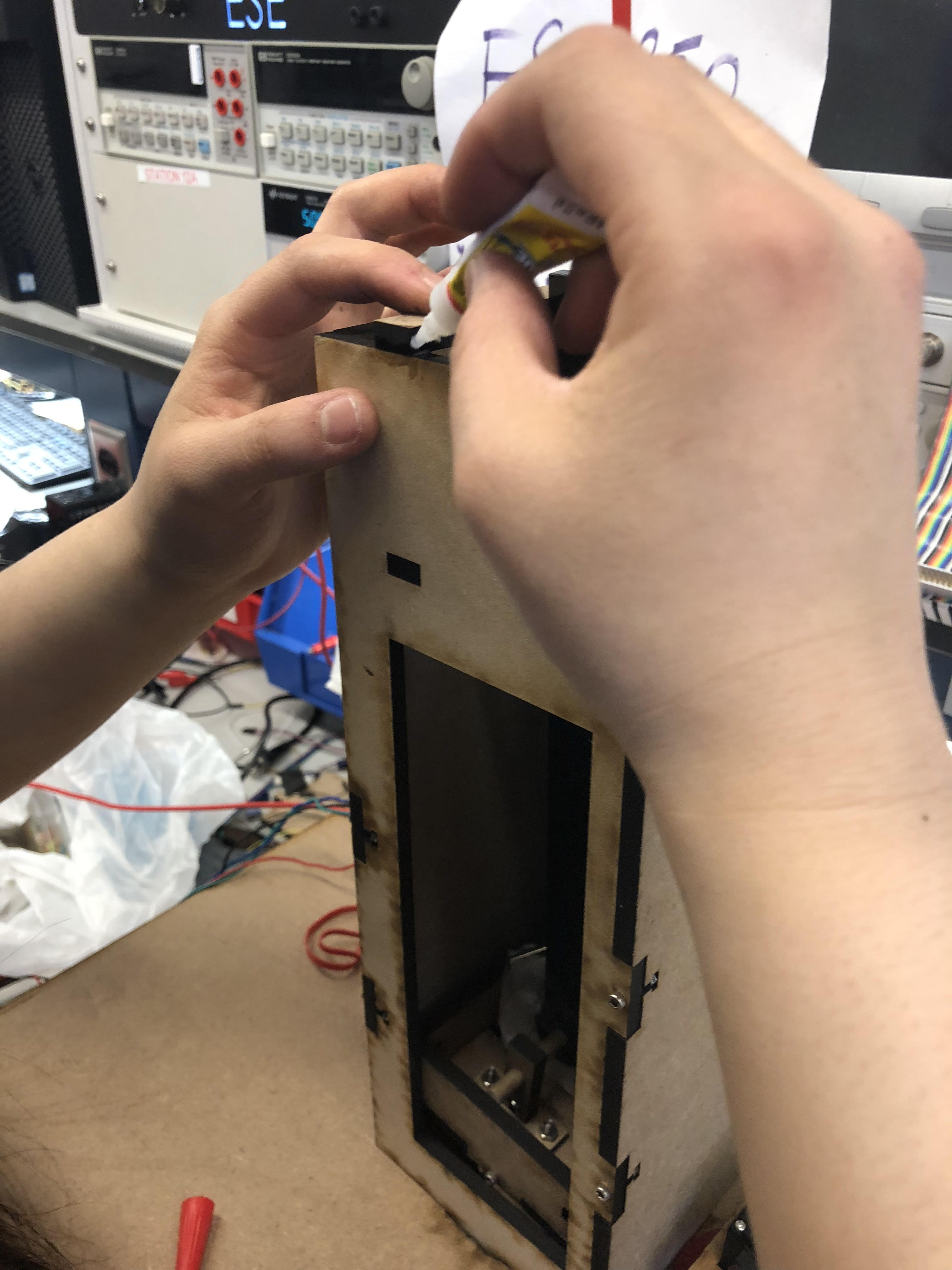
Fixing the syringe to which we have cut slit into to better reach the frosting bag.
-
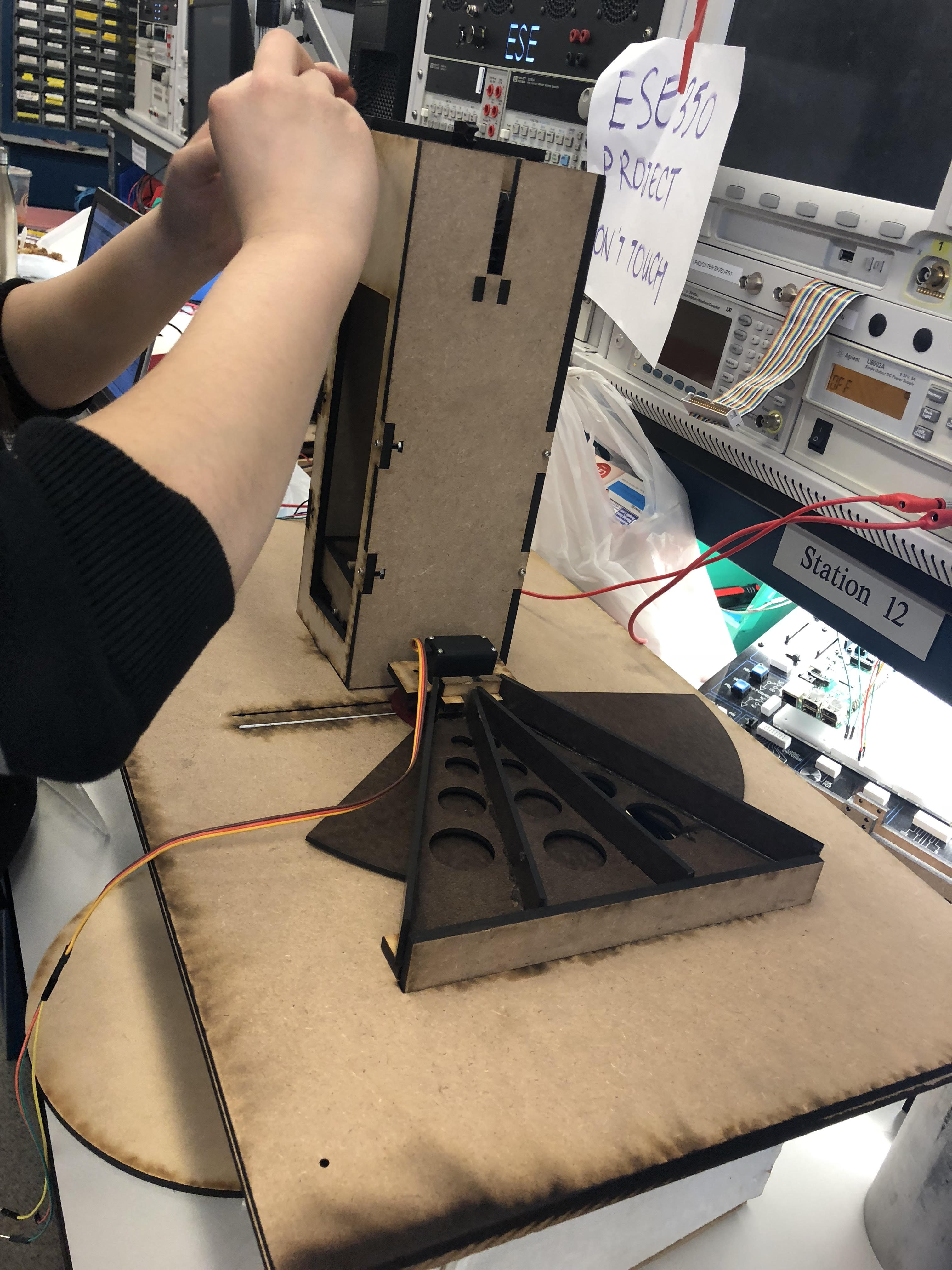
The sprinkle & decorator chooser system attached to the servo is on the front of the base.
-
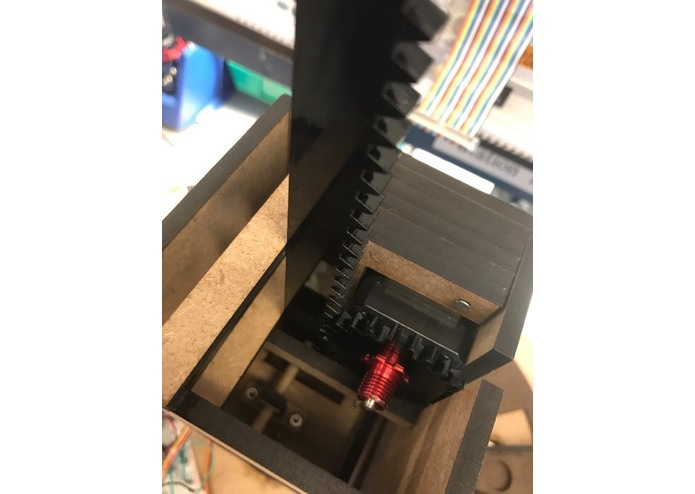
The internal view of the vertical gear in the locked position.
-
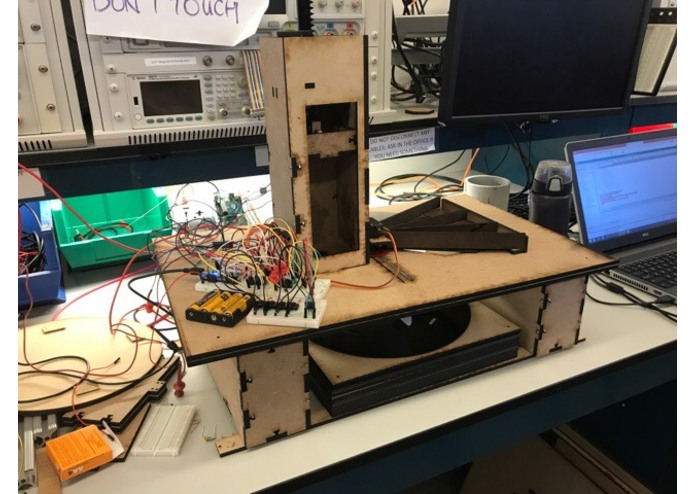
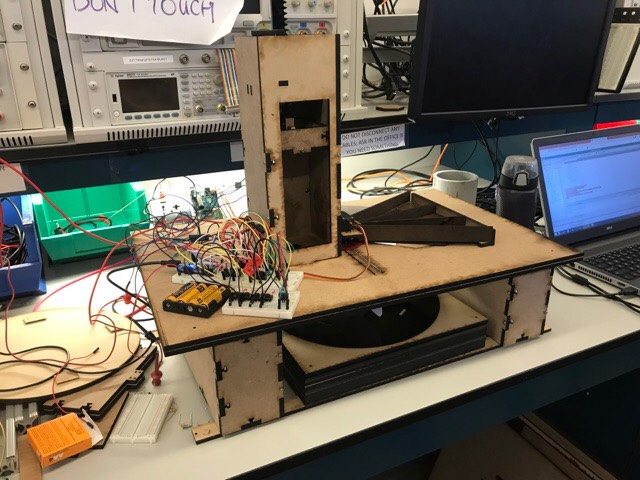
Baseline prototype: syringe structure, the turntable and the sprinkle distributor.
-
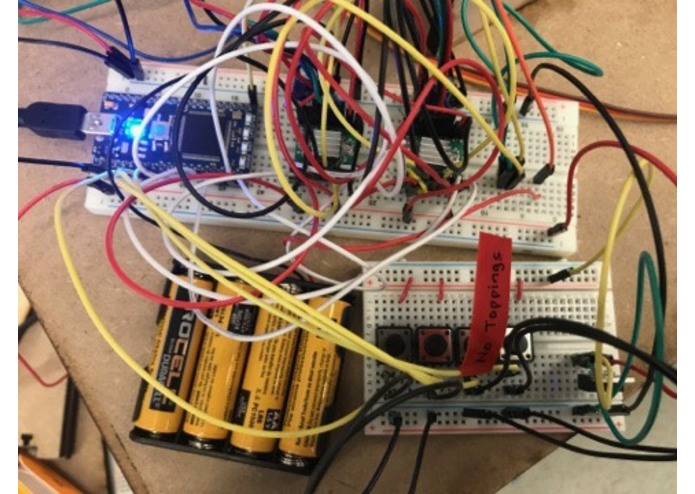
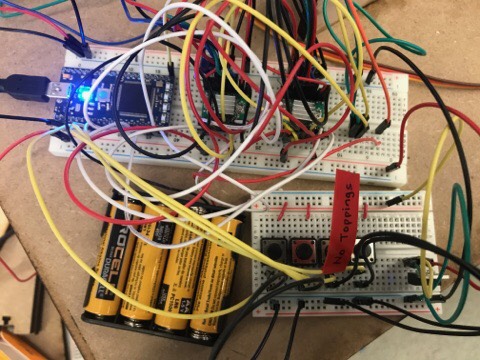
MBED on the top left, the batteries supplying the servo on the bottom left. Reach goal push buttons for user input control on bottom right.
-
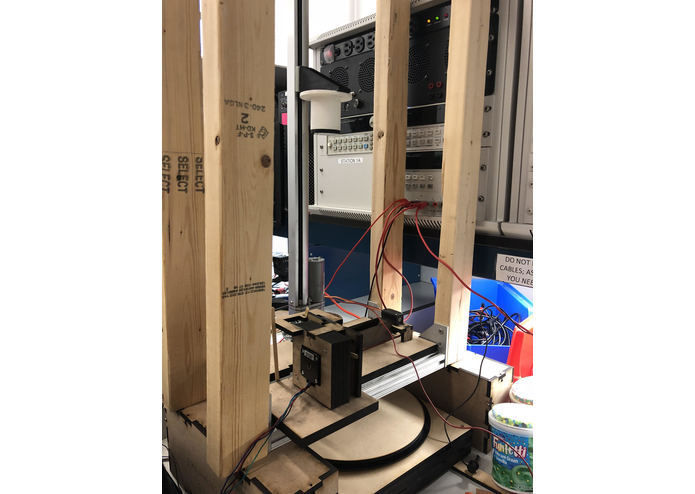
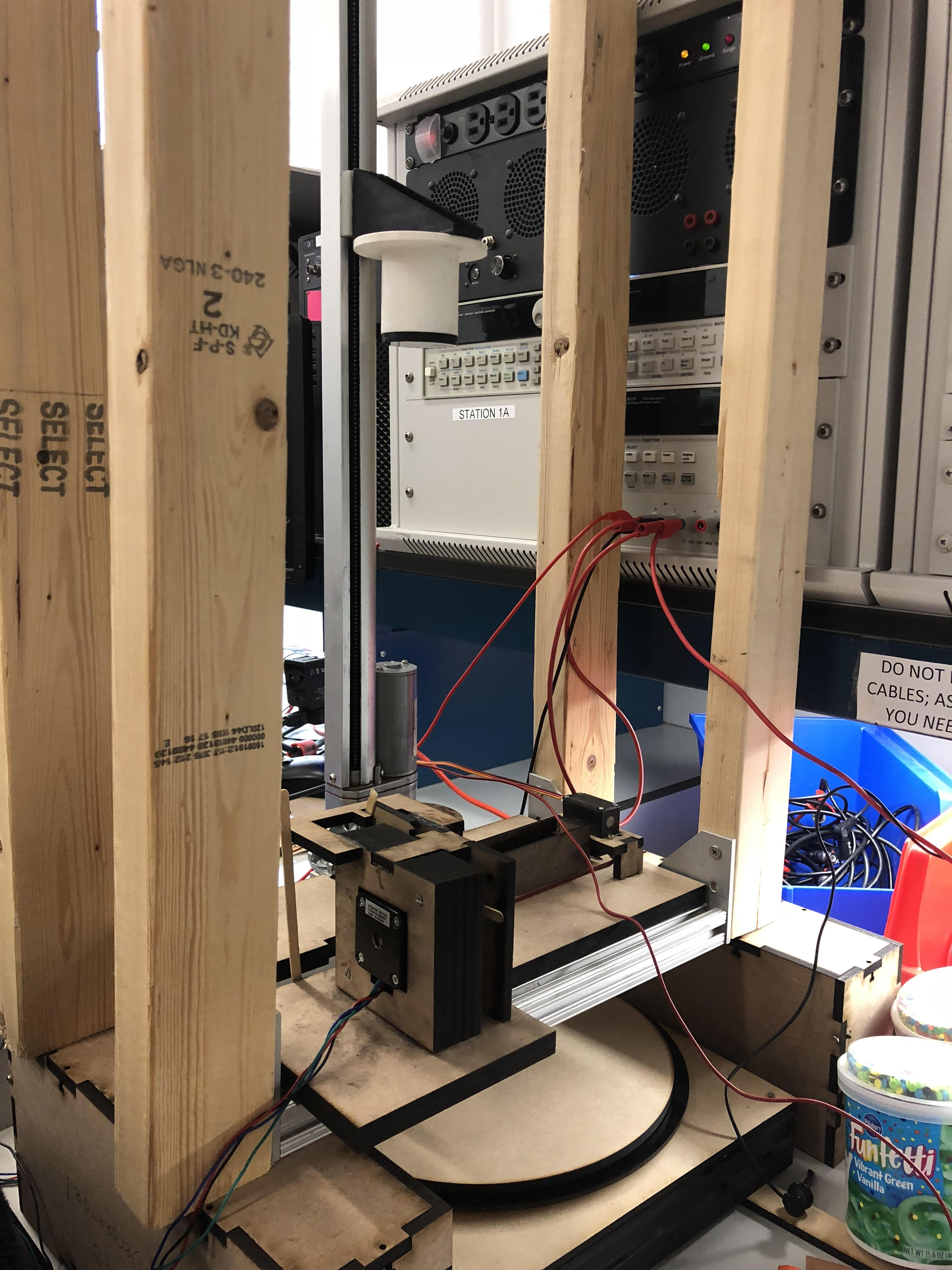
The Linear actuator with the frosting bag attached to the pushing mechanism.
-
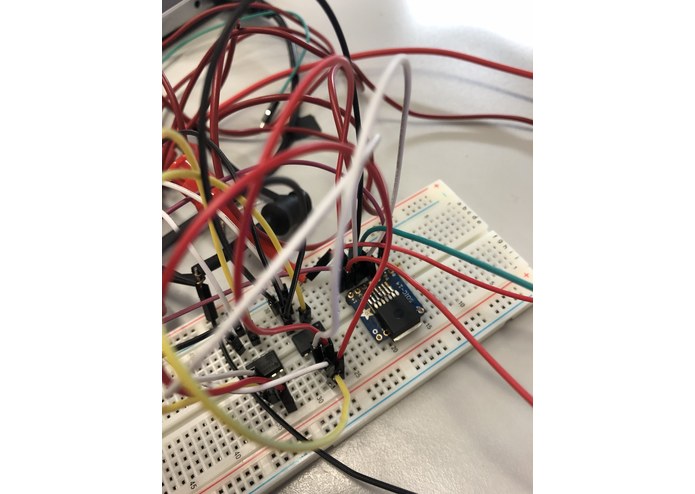
The H-Bridge soldered, the Op-Amps amplifying the current out of it for the Linear Actuator to get supplied with power.
-
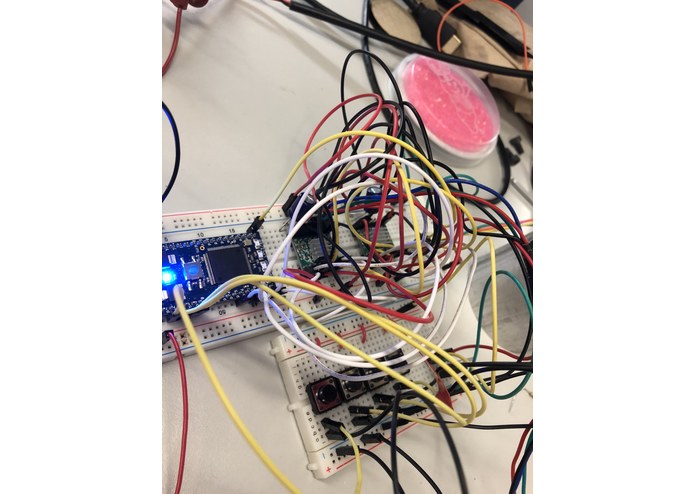
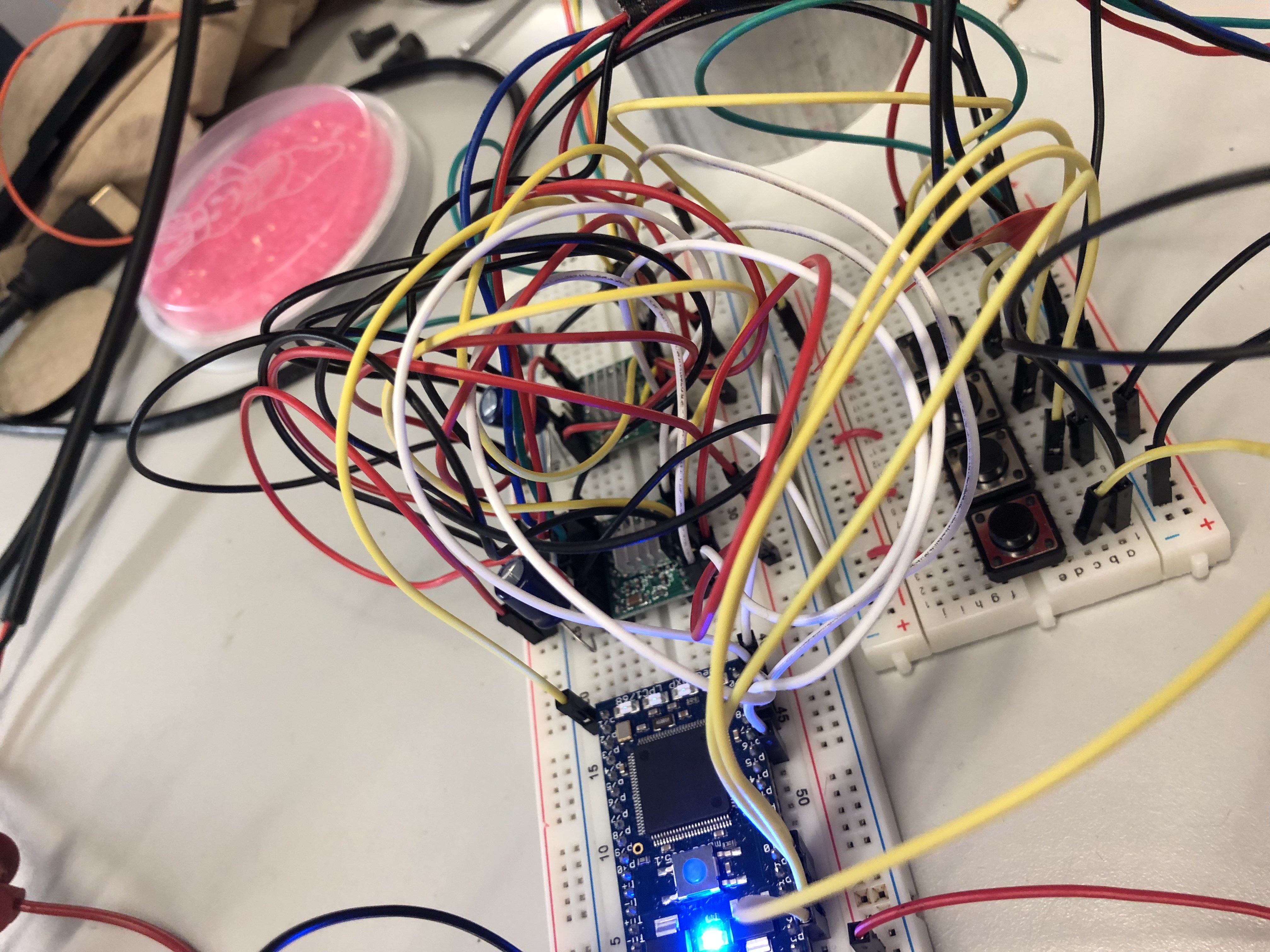
MBED, Stepper Motor Drivers connected, push buttons.
-
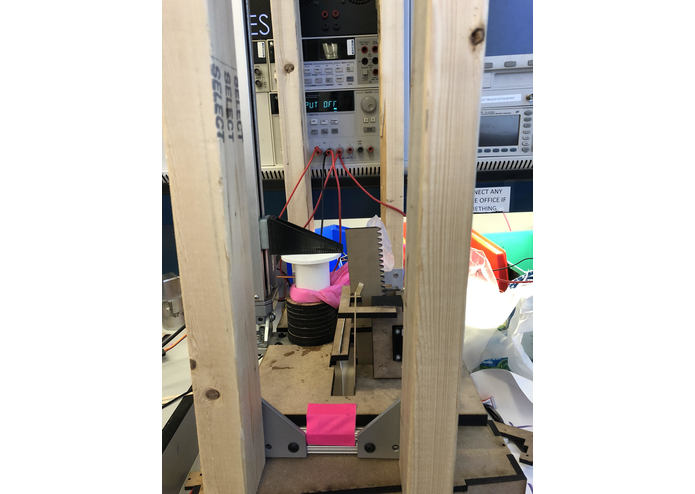
The frosting bag in the actuator.
-
The MBED and the drivers connected to the actuator.
-
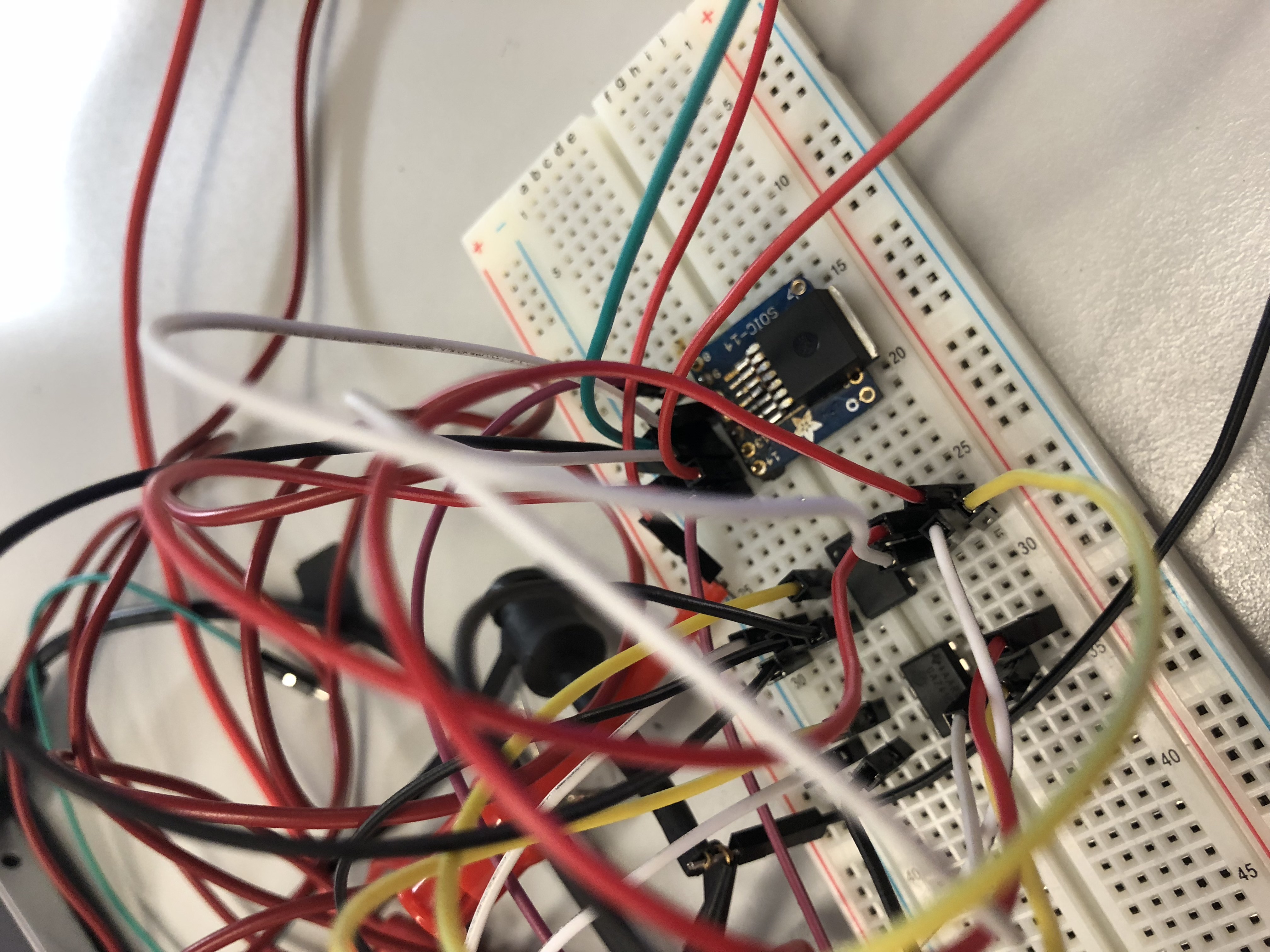
The H-Bridge with the op-amp, MOSFET, the relay and the resistor (100 Omegas)
-
The vertical gear, turntable, linear actuator. The last product.





Concept & Ideas
Description of our Product
Frosty is a pancake decorating machine, with various types of sprinkles, frosting and decorations as options for customization. We plan on making a automated cake decorator that places frosting and sprinkle patterns on a baked cake, a thinner care like a pancake or a cookie cake. The cake will be placed on top of a “plate” that moves along a mechanical turnrtable, controlled by a stepper motor. We have designed a syringe mechanism using gears to be controlled by a stepper motor to squeeze frosting on the cake. A servo-controlled sprinkle chooser mechanism will let us use toppings of our choice depending on the hole size: cereal, sprinkles etc.
At the end, we will have a delicious-looking cake to serve customized and decorated to our liking!
Parts List / Current and updating!
Mechanical (These are mostly RPL’ed with laser cutters.)
1) Approximately ~30 sheets combined of MDF and Acrylic
~10 sheets of Acrylic, ¼ inch and ⅛ inch varying in size, smoke and black color
~15 sheets of MDF, ¼ inch, smoke color.
2) Vertical gears cut from ⅛ inch black color Acrylic
3) Fake cake cut from ⅛ inch black
4) Sprinkle decorators cut from ⅛ inch MDF smoke color
5) Linear Actuator with metal frames.
Electronical
1) 2 stepper motors (NEMA 17 bipolar 1.65"x1.65"x1.57" 4-wire) Datasheet: https://www.omc-stepperonline.com/download/23HS45-4204S.pdf
2) 1 continuous rotation Servo Motor (SunFounder Metal Gear Digital RC Servo) Datasheet: http://wiki.sunfounder.cc/index.php?title=55g_Metal_Gear_Servo
3) MBED LPC1768 Microcontroller Unit. Datasheet: https://www.nxp.com/docs/en/data-sheet/LPC1769_68_67_66_65_64_63.pdf
4) Push Buttons (C&K Switches, Tactile Switch)
Datasheet: https://www.mouser.com/datasheet/2/60/pts645-1382776.pdf
5) LM741 Op Amps (x2) Datasheet: http://www.ti.com/lit/ds/symlink/lm741.pdf
Baseline Goals
1) Build the syringe strusture with the vertical gear with the stepper motor attached for angular rotation, and build the turntable with the stepper attached for radial turning so we can reach around all the cake. Make sure the stepper code works well with the mechanical parts, calibrate.
2) Use the MBED to control the 2 stepper motors, one tied to the turntable we will build and one for the syringe structure. Initial development goal would be to squeeze frosting out of the syringe onto the cake and make sure we can decorate it in an aesthetic manner and cover the most area we could.
3) Introduce a spreading blade so that when the turntable turns with the syringe simultaneously, the spreader blade will spread the frosting evenly on the cake.
Reach Goals
1) If time permits, we will try to integrate the machine with more decorations like sprinkles, cereal bites, colored pebbels etc. for cake decoration. To achieve this, we are thinking of a servo-controlled design panel with different diameters of holes cut into them to account for different types of decorations.
Version 1 First Milestone
We are building a cake decorator with a turntable and two decorator types, one for the sprinkles and the other for the frosting itself. We are using a syringe for our frosting spreader mechanism, tied to a stepper motor and powered by the turning motion of the stepper. Our turntable, as both of our baseline goals, will be turning with a stepper motor as well.
We have built our syringe structure with a vertical gear involved, which will serve to push the frosting down towards the hole on the bottom of the syringe to decorate the cake. The syringe is not stable as of now but we will stabilize it using the new CAD's that we will make and also will work in RPL.
Given the nature of the project, there was a lot of laser cutting involved.
A stepper motor is attached to the arc of the vertical gear, to automate the turning motion.
We have built our syringe in the RPL lab but our first prototype was not as we expected it to be: the syringe mechanism was not working well, the vertical gear was not fit into the place, there was no room for the stepper motor to stand while controllig the vertical gear. We have identified these concerns to get addressed to in our next milestone or demo.
Goals for Next Milestone
1) Might have to RPL a bolt to keep the syringe structure tying the stepper motor to the vertical gear we have made.
2) We need to drill a hole in the bottom of the syringe so that we can attach the tip of the frosting bag to it, so that frosting can ooze out of the hole and land on the turntable.
3) Make a circular "fake cake" from the Acrylic material for testing purposes.
4) We need to fix the gears in place and put sticks to ensure that the vertical part of the gear locks into the nails of the circular gear.
5) Figure out the code for the stepper motor controls.
Version 2 Second Milestone
We have gotten the syringe working with the stepper motor associated to it running on a thread and it took a look of trial and error getting the right parameters for the stepper motor to work. We have cut our base and our turntable using the laser cutter in the BE lab, we have changed our base designs a lot of times. This time, we cut our base to be in the shape of the turntable itself, a circular base to which we have carved a gear entrance and attached the stepper motor. The shape of the base for the final product is a circular turntable with a box of MDF sheets stacked up together, with a special compartment for the stepper motor to be placed in. It took us a lot of time to cut this in the Laser Cutter machines in the MEAM labs. We have purchased frosting and frosting bags to attach around our syringe mechanism, but the syringe was not applying enough pressure at this stage to smooth out frosting, and it was really hard to attach the syringe structure into the slits of the base, and take it out and fill the frosting.
Goals for Next Milestone
1) Integrate the threads in the C++ code of the stepper motors to make them run simultaneously, turning the table and the gear as well.
2) Calibrating the vertical gear to move up and down in a certain range.
3) For our reach goal, get the servo motor integrated with the sprinkle/decoration/topping chooser structure.
Baseline Demo
We plan to demo our syringe and our turntable working in full function, with a little slit cut into our base to spread the frosting as the syringe pushes it down, and the turntable turns thus we do not have to use the plastic spreader which can stay attached.
Our baseline demo did not meet the par just yet, and we have decided to switch our design a lot to make this project work the way we want it to work : produce cake decorations!
We have acquired a linear actuator from last year's projects which we have placed out base on top and then mounted it to a stand. Our work in this design is explained further in the reach demo section.
Next Goals for Reach Demo
1) Get the linear actuator to work in such a way that it moves up and down in a calibrated speed, integrated with the MBED if possible, through an H-Bridge or some other relay-powered circuit structure.
2) Get the vertical gear structure working in such a way that a spreader blade should be attached to it, and the gear shout lower it up and down towards the cake when prompted.
3) Change the base and mount it below the actuator.
4) Put the servo motor and the stepper motor on the new base, and calibrate the spreading blade lowering with the turning of the turntable, also get the servo motor turning in the range we want to turn so that sprinkles can fall through the little slit that opens up and closes with the movement state.
Final Demo : Reach Goal Updates and Final Reflections
At this point, our final product looks so much more different than how it looked in the first place when we have just started working on it.
We have presented our final product which was partly unfinished due to technical difficulties and design choices which will be explained further in this section. Our final demo-ed product can be seen in the pictures: it involves the linear actuator squeezing out the frosting bag, the servo making 45-degree angled rotations back and forth to allow the sprinkles to come out, the vertical gear tied to the stepper motor moving the spreader blade up and down to spread the frosting over the cake, and the fake-cake we have cut from RPL turning on our turntable with the stepper motor attached to it. To supply power for the linear actuator and to ensure that it moves up and down in a certain range we have determined so that it could apply appropriate pressure to the frosting bag to squeeze frosting out of the little hole we have drilled in RPL into the base, we needed to supply 1A at the very least to the actuator, which operated on 12Volts. Thus we had to build an H-Bridge to amplify our signal voltage the output of which we would connect to the actuator and integrate our H-Bridge with our MBED.
In the beginning, we have tried using a ready-made H-Bridge chip and connecting the relevant pins to power and to the MBED to see if it would interface successfully, and would provide the power needed. One problem we had with this was tht the H-Bridge could not handle the current going through and would extremely get hot and was only good for use for 5-10 seconds. Also, it could only power the actuator to go up or go down, not both ways. Thus we then decided to manually build our own H-Bridge using a diode-installed relay, and a MOSFET and a resistor of 100 Omegas. Debugging the building of this manual relay took us a lot of time to get it working and it was not perfected by the time the reach demo was due. In addition, a problem with the lack of power supplied to the actuator is that we could only get it to move one way with the single H-Bridge structure attached to the MBED, and when the actuator was stuck, the H-Bridge could not supply enough power to bring it up or down, thus we had to manually provide it 12V from the Triple Output Power Supply so that the actuator would move back up to its original position.
Due to the time constraints, we were not able to further work on the project to perfect it but our next step would be to mimic the H-Bridge structure for the opposite side of movement for the actuator, so we would build another H-Bridge exactly like the one we have got to work for the upwards movement of the actuator so we would achieve continuous movement to push the frosting down out the hole in the bag.
Problems we have faced & Our error reflections
1) We have stuck with a faulty design structure from the beginning which was the vertical gear syringe structure and tried to improve it in many ways. The mounting of the syringe to the base was almost impossible, since the holes of the base were hard for the syringe to go through to stabilize, and this design choice made filling the syringe really hard. Also the syringe did not have enough power and couldn't provide enough pressure to squeeze the frosting out.
2) The linear actuator idea and the actual mechanism was provided to us very late in the project's process (approximately two days before the demo was due) thus we did not really have the time nor the expertise to operate the mechanism properly and test it with our previous setup with the steppers and the servo, thus integrate it into our system.
3) The actuator got physically stuck right before the demo, and we were unable to get it to move although the other parts of our project were functioning: the turntable was turning with the stepper motor, sprinkles were getting scattered over the fake-cake with the servo motor, and the vertical gear was lowering the spreader blade. Thus our demo was incomplete and we felt really disappointed by that.
What we have learned
It is really important to think about a feasible design for the idea had in mind before proceeding full on with the production of this design and bringing it to life. We have struggled a lot and lost a lot of time in the process of trying to make the vertical gear work in the syringe structure, and couldn't get it to apply enough pressure until we got the actuator. One of the lessons we have learned is to better design our product, at least have a better idea of its features and do more extensive research about it and visualize it better.
Although we were not able to demonstrate a complete product with our reach goals included in it, we have put so much effort into testing and making our product, long hours spent with testing and adapting our design choices. Sometimes we had to toss everything and start over from the beginning, and recut our entire project.
Built With
- c++
- linear-actuator
- mbed
- mosfet
- relay
- stepper-motor

Log in or sign up for Devpost to join the conversation.