Inspiration
After reading the prompt for the CAD project, my mind was directly set on a space rover, they are used for research and finding new variables of space, as well as, going through rough, unseen terrain. I researched various designs of Mars and moon rovers, ultimately settling on the design we made.
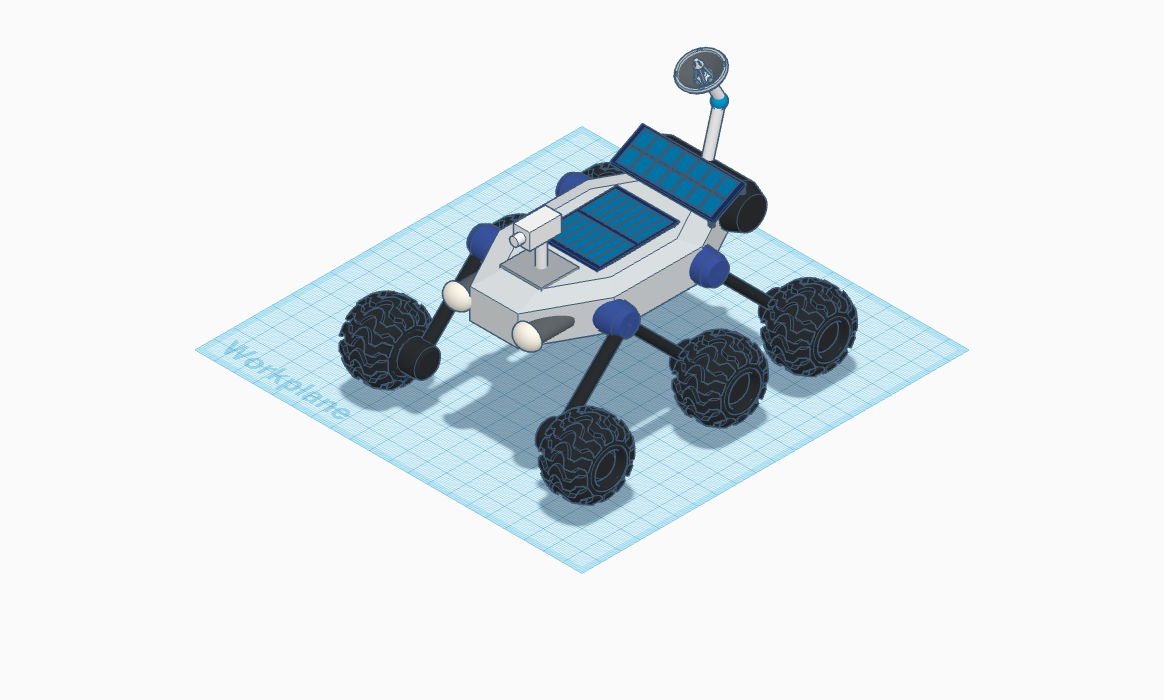
What it does
Our design, Rough Rover, is an elevated rover. It can be used to go through rough terrain, using its all-terrain wheels and suspension system to go up and down obstacles easily. Additionally, it has a 360 camera sensor and microphone, used to detect "survivors" in the area, with motion-activated lights to spot anything. When something is sensed/spotted, it'll send a signal with location to a control center (humans), notifying to bring out help and rescue. All of this is powered by solar panels.
How we built it
We build the Rough Rover using metal and plastic pieces, with the addition of electrical wiring to have the rover run. This would ensure a balanced measurement of the weight of the rover to have it work easier.
Challenges we ran into
Some challenges we ran into were how we were going to add better traction and how it was going to be powered. First, we thought of 4 bigger wheels, but it wasn't going to have very good suspension and traction, so we thought of 6 smaller wheels with longer "legs" more similar to a Mars rover. We researched this, and how it to be a better solution. Additionally, we wanted to work on how it was going to be powered. We thought of various scenarios, like cave searches, and instances where there wouldn't be as much sunlight. But, the battery would've added too much weight to the rover, defeating its purpose, so we decided on 2 solar panels.
Accomplishments that we're proud of
An accomplishment that we are proud of is how we designed a "functional" rover with all the features necessary for survival and rescue.
What we learned
We learned how similar a lot of robots are to one another, like our Rough Rover and space rovers used by NASA.
What's next for CAD Rough Rover
Next, we hope CAD Rough Rover is going to be modified to be used in ALL environments and terrains, like underwater, in swamps, etc.

Log in or sign up for Devpost to join the conversation.