Inspiration
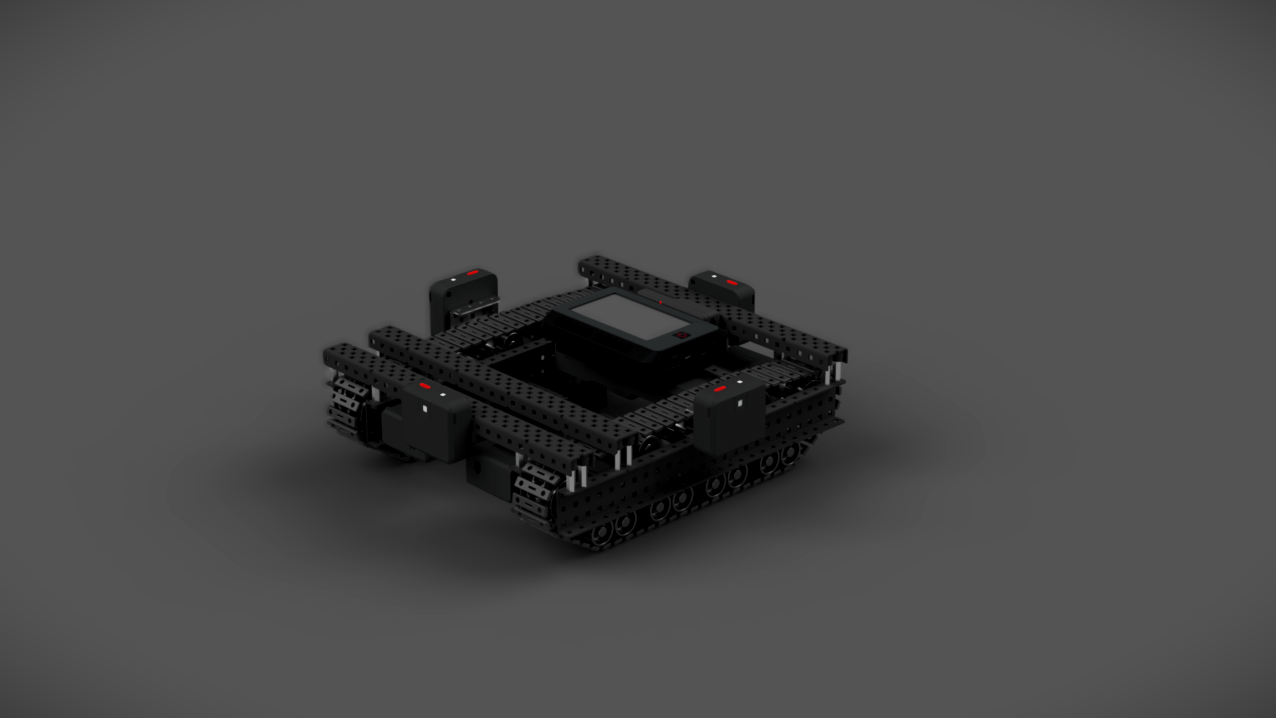
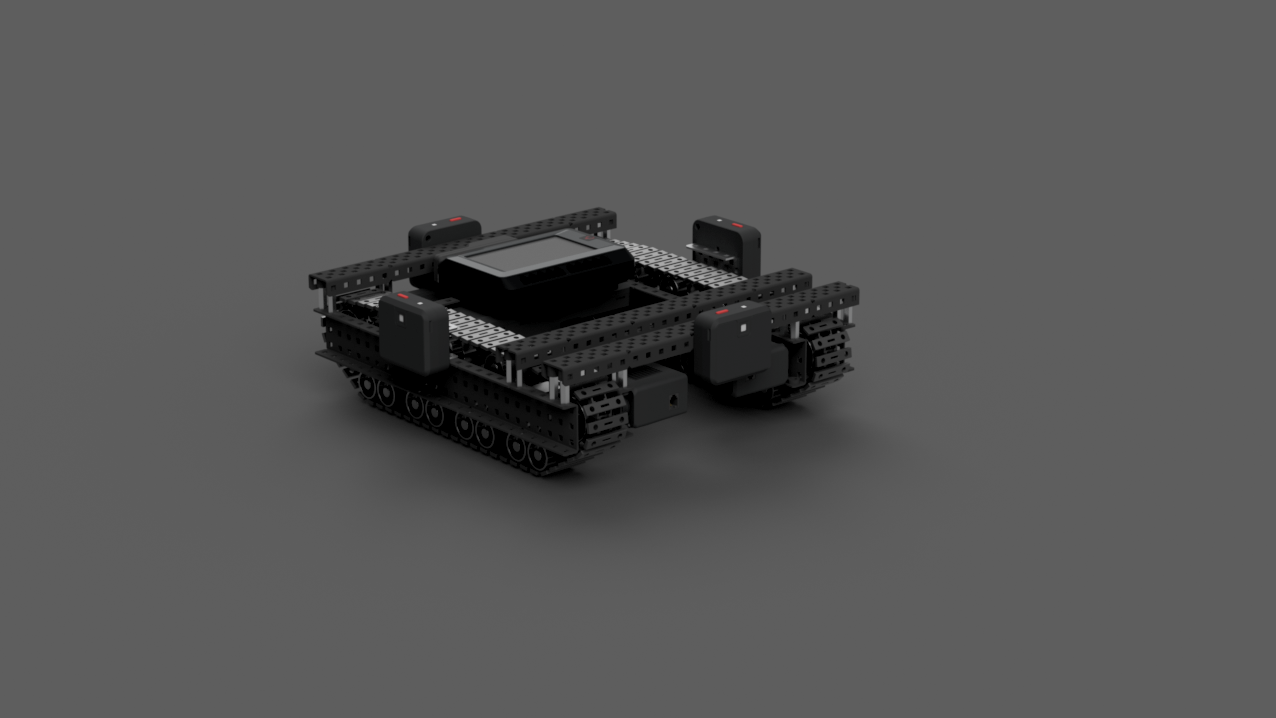
To get straight to point our robot was partially inspired by today’s technology such as the muddtrax which are known to be all terrain vehicles. This of course was brought upon by the prompt in which our robot had to be able to traverse through these rough terrains as well as look for survivors. Through this we knew three things : it needs to be durable, it needs to sense survivors and it needs to be able to traverse different types of terrain. These three goals were the main inspiration in a way as they led us to research which kinds of designs would make it possible to accomplish this. A prominent note would also be how we took advantage of our resources such as VEX by taking inspiration from the ‘Tank Tread Kit’. Its use is clearly visible in our design and was what made it similar to the muddtrax.
What it does
Briefly, our robot is able to travel through multiple types of terrains, sense and communicate the location of survivors as well as go on long missions due to its rechargeable battery. As the prompt follows is a sort of rescue robot which works in any case such as snow, rain, rocks or mud. We made sure to take note of this and designed our robot to quickly and efficiently traverse these lands and locate these survivors. We also made sure to focus on other factors like the fact that it may be able to get flipped under certain conditions and made sure to prepare for this by centering part of its weight in the middle. Overall our robot is able to accomplish the safety and finding of survivors skillfully and swiftly through its prominent design.
How we built it
The design process began through the vision of what our team wanted the robot to be and what it should be. Through the team’s thinking and the requirements of the prompt we were able to brainstorm some ideas for the robot. We made it a goal to accomplish all the points in the criteria while also having our own additions to the design. After brainstorming we began with the drivetrain and thought of the use of a tank drivetrain which uses built in suspension in the wheels. This idea would allow the robot the quickly traverse the rough terrains with great stability. The goal of durability was also in our heads when building the drive train so we went on to add aluminum C Channels to maintain the speed while also making our robot more resistant. More over, our drivetrain consists of a 4 motor drive with an output of 600 RPM making the previous also possible. The next goal was the sensing of survivors. Through the use of AI vision sensors our robot would be able to effectively identify and locate survivors. As well as this we ensured that the robot would have the ability of autonomus controll or remote control. Lastly there was the goal of long lasting missions which was completed through the use of a rechargeable and switchable battery. As mentioned before we also made sure to distribute its weight with part of it going mainly to the middle in order to make the chances of the robot flipping over less likely.
Challenges we ran into
While we were Cadding there was a significant challenge that arised and it was the fact that the wheels of the drivetrain would not align. We persistently tried to change the dimensions to see if we can make them more aligned but each time it wouldn’t be completely straight. However we continued and managed to get the wheels to be as aligned as we could. There was also another problem when it came to adding the tread links. Due to the position of the wheels the tread links were unable to be placed correctly. This issue, however, was easily fixed by the changing of the placement. There were other minor issues that also occurred while creating our design but they were all mostly shifting the positions by a little or changing the dimensions.
Accomplishments that we're proud of
When it comes to the robot we’re proud of the overall design in general. We also managed to complete about all the requirements which is yet another accomplishment. Our team believes that it’s a bit difficult to incorporate every single requirement and make it more different/ unique than the other probable designs. That’s why we believe that our robot design was able to accomplish a unique perspective while still meeting the requirements. We are also proud of the effort that we put into the design and challenges we were able to overcome. It took hours of work to get everything right and we persisted even when things seemed hard which is an accomplishment on its own.
What we learned
Each individual in our team has different varieties of experience so when it came to what we learned we all had varied versions. As a person (Danniele) who has never CADed before I managed to learn a lot about how to work the software and how to place one’s own ideas into a visual form. This is unlike Inoh who has been CADing for a few years but in his own experience he learned to be more patient with the process and more the use of tread links in designs. Sebastian on the other hand learned more about the design process or in other words the first steps of the design process that don’t include the physical building aspects. We all managed to learn something during this competition which manages to inspire us.
What's next for CAD project
We only made this design for the competition but we believe that elements like the use of tread links and AI sensors can be incorporated in future builds. As well as this the design right now may be expanded to have other structures like an intake or claw. For now our team plans on using this CAD for future references in case we ever plan on creating a design similar to it or a design that needs to fulfill the same requirements. In all honesty the robot was a great way to experiment as well as learn more about the different types of parts and pieces that can be used. We, as a team, have officially managed to expand our knowledge and plan on continuing this.




Log in or sign up for Devpost to join the conversation.