Inspiration
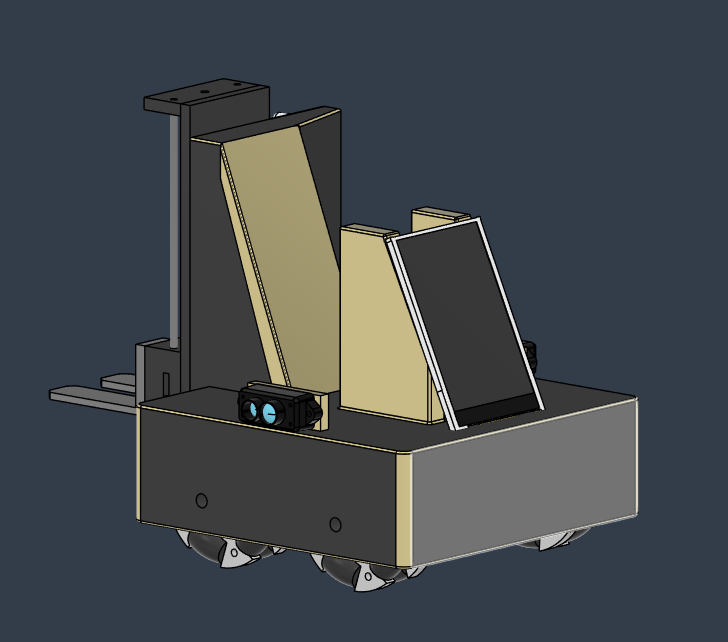
Our inspiration was a forklift design and with the implementation of two prongs and a linear movement to simulate a forklift and have a efficient design for this challenge
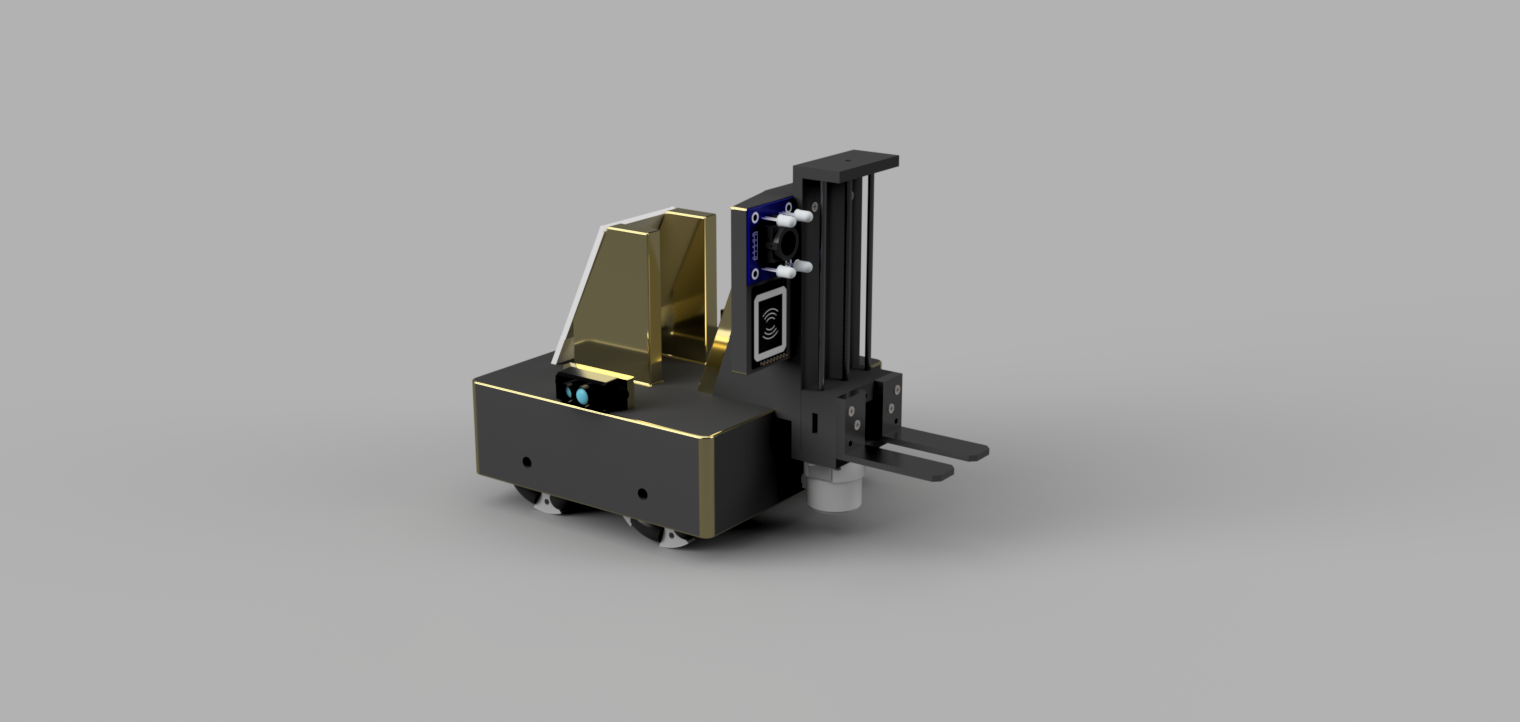
What it does
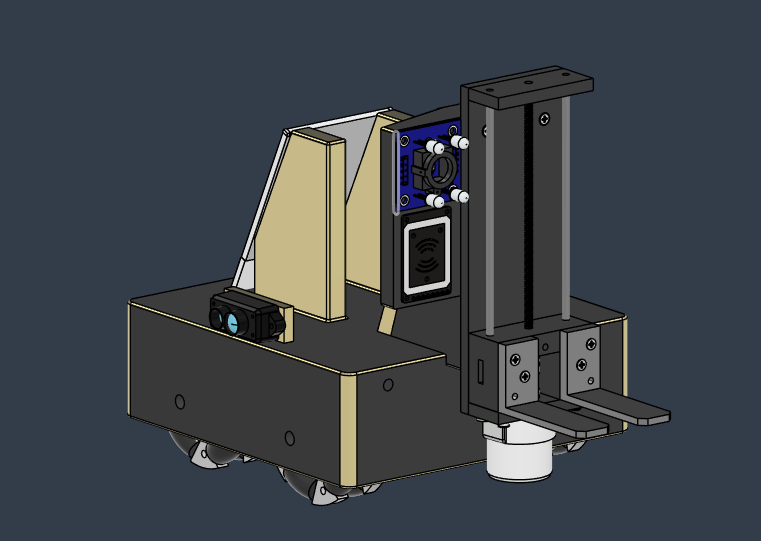
The functions of our robot is a linear slide with two prongs attached to carry objects and have it raise or lower for organization purposes. It also includes sensors for object sensing and color detection and omni-wheels which allows for multi-directional movement.
How we built it
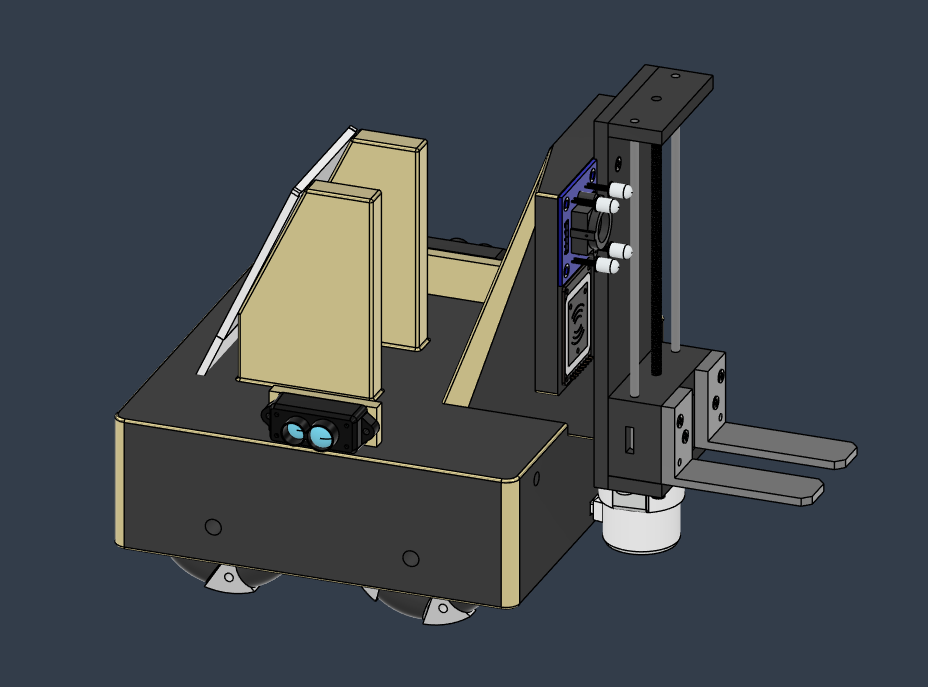
We first started on our base making a part to hold the robot together, which allowed us to continue to the drivetrain and have a base on top of the drive to attach the linear slide and sensors for object sensing and a touchscreen.
Challenges we ran into
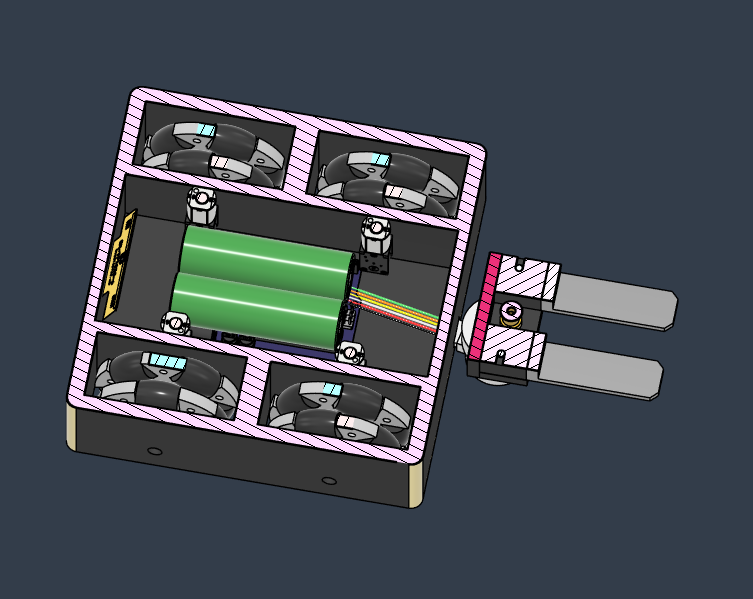
Challenges that we ran into was the size limitations and the struggle to implement all aspects into a very compact design of 15 centimeters. we overcame this challenge was by stacking most objects inside the drivetrain and put the rest stacked on top of the base.
Accomplishments that we're proud of
Accomplishments that we're proud of is the drivetrain and the linear slide which were difficult to create due to the size limitations and we are proud on how we were able to create these designs
What we learned
We learned on how to create and find objects and sensors to add to our robot to allow it to work and how to animate certain aspects on the CAD design to make for an easier demonstration
What's next for Warehouse robot
The next steps for the robot is to test and see if new implantations are needed to create a more efficient, reliable, and compact design. We can also test aspects like other drivetrains like a holonomic drivetrain to test for easier movement.

Log in or sign up for Devpost to join the conversation.