
Inspiration
Most drones can only stay outside the building, and either they have a limited cruising range, or a limited set of functionalities. Our inspiration comes from the Boston Dynamics ATLAS prototype which has a Lidar on top of its head. We are also influenced by Lockheed Martin's Alpha Challenge, which requires participants to build a autonomous racing drone using Nvidia TX2. We intend to build an affordable, multi-purpose drone which is capable of both outdoor FPV(first-person-view) long-range flight, and in-door precision flight. With deep learning algorithms it is capable of real time route planning and image recognition.
How we built it
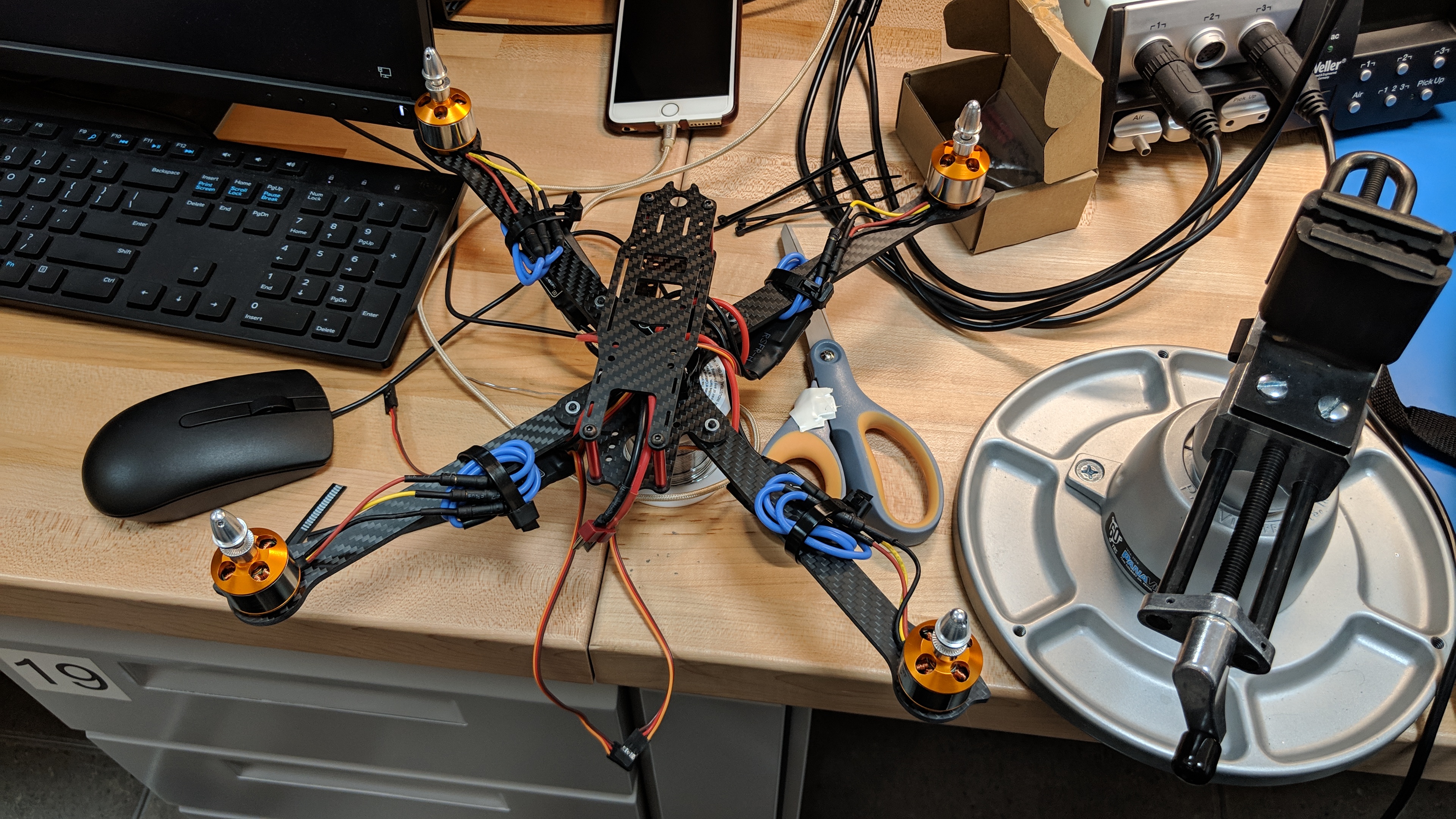
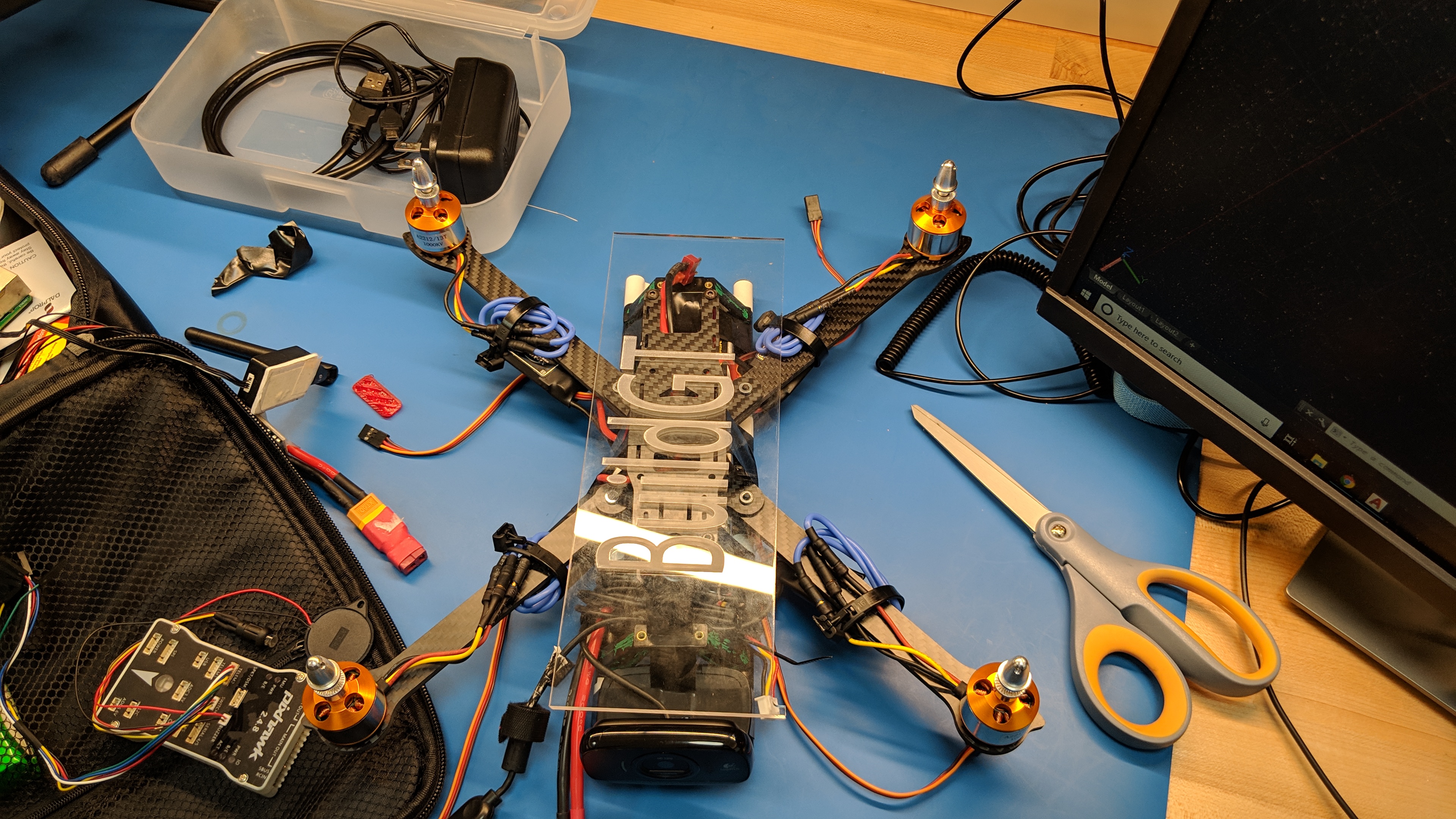
We built this drone based on a 360mm carbon fiber racing drone frame. We attached 4 heavy-lifting motors as well as a Logitech high-resolution camera to it. We mounted a Lidar behind the Raspberry Pi on the same plastic plate. It has a 6000mAh battery capable of 50C continuous discharging.
Challenges we ran into
Originally we tried to go with the Intel Edison but it proved challenging without having a sufficient power source. The airframe for the original 360mm drone is too small and incapable of holding the large autopilot companion computer as well as the Lidar. We 3-D printed a plastic mounting platform which is quite lightweight but is spacious enough for heavy mountings. It also took a long time to configure ROS on Raspbian in order for the Lidar to run successfully. We also had trouble in configuring the OpenCV environment for Raspbian(it is too time-consuming, the cross-compiling took hours to complete). Besides, we have to figure out a way to filter out noisy sensor data.
Accomplishments that we're proud of
We are able to control the 4 motors smoothly as well as making it to the air.
What we learned
We learned
What's next for Buzz Reconnaissance System
Replace Raspberry Pi 3 B+ with Intel Jetson or Nvidia TX1/2
Built With
- 3dr-radio
- a2212-motor
- ardupilot
- logitech-camera
- navio2
- raspberry-pi
- ydlidar



Log in or sign up for Devpost to join the conversation.