-
-
Butter Bot
-
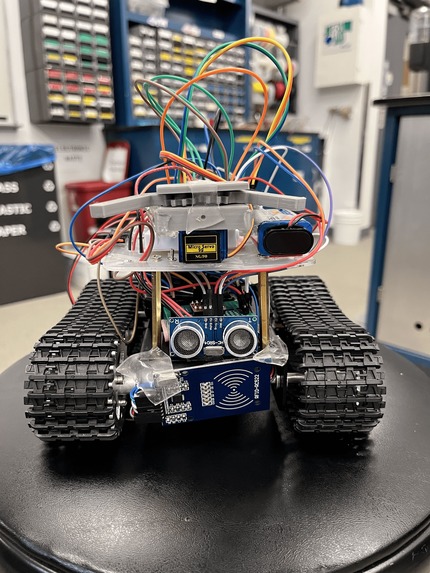
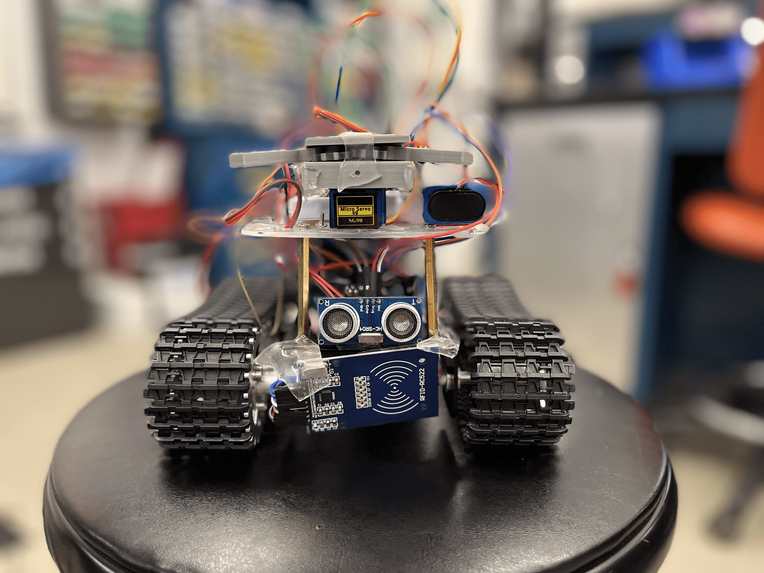
Zoomed Out view of the Robot (Ultrasonic Sensor, RFID Module)
-
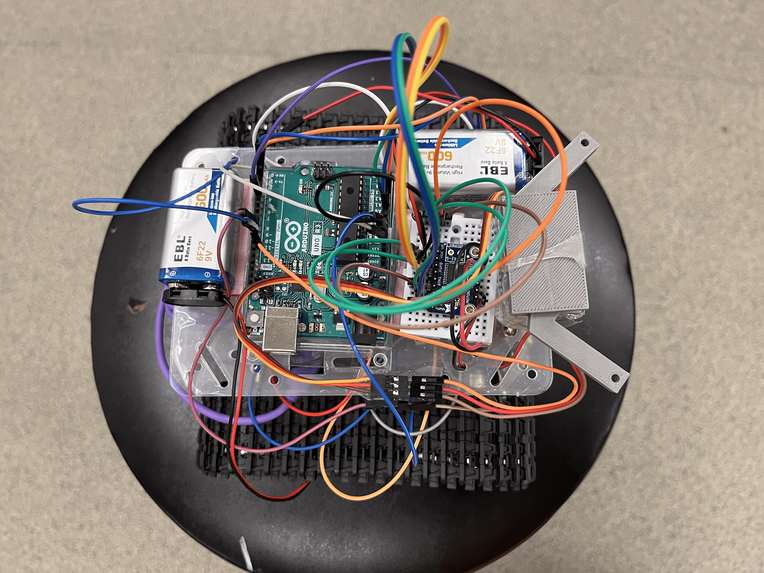
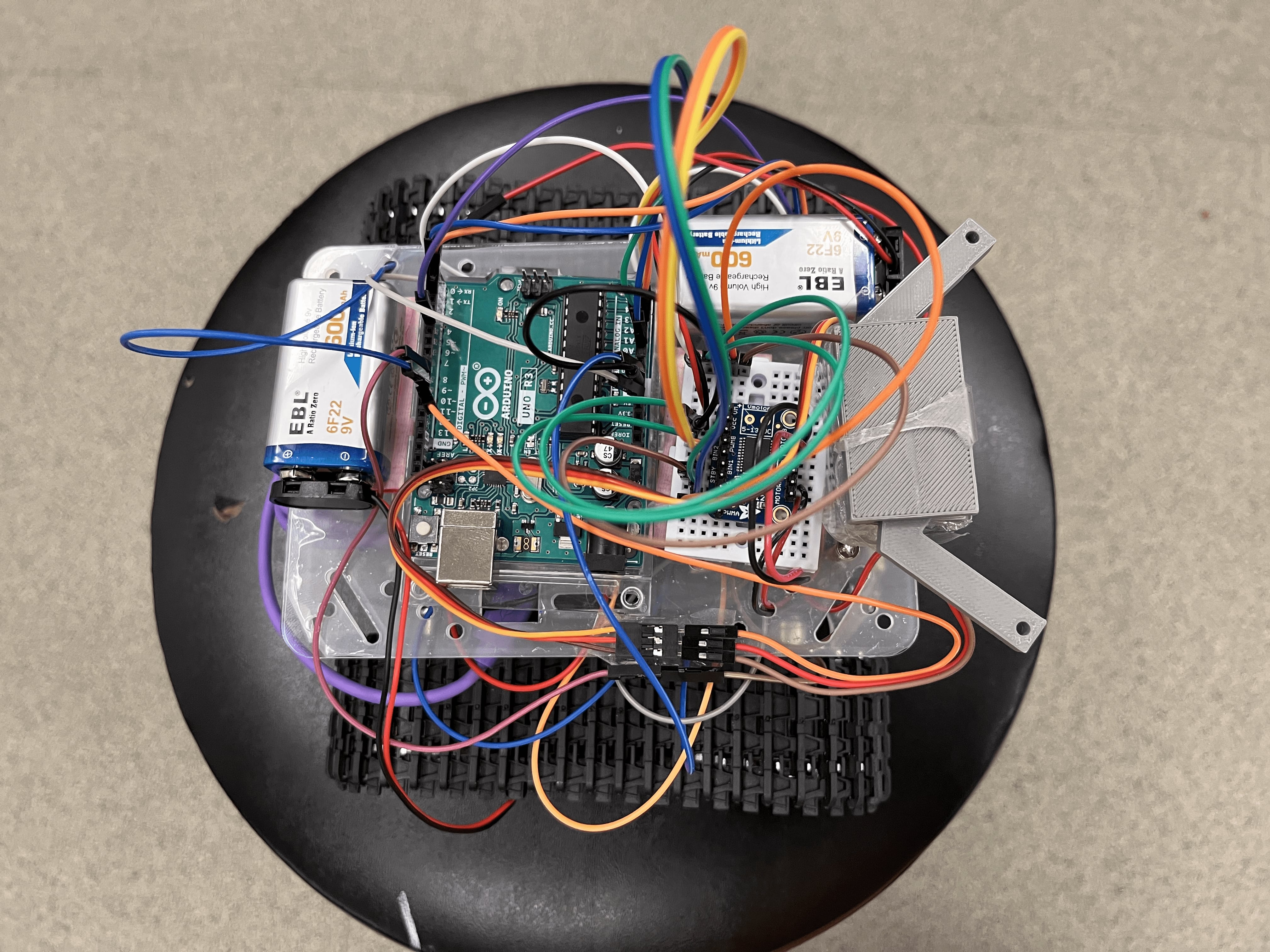
Top View of Bot (Arduino, Claw)
-
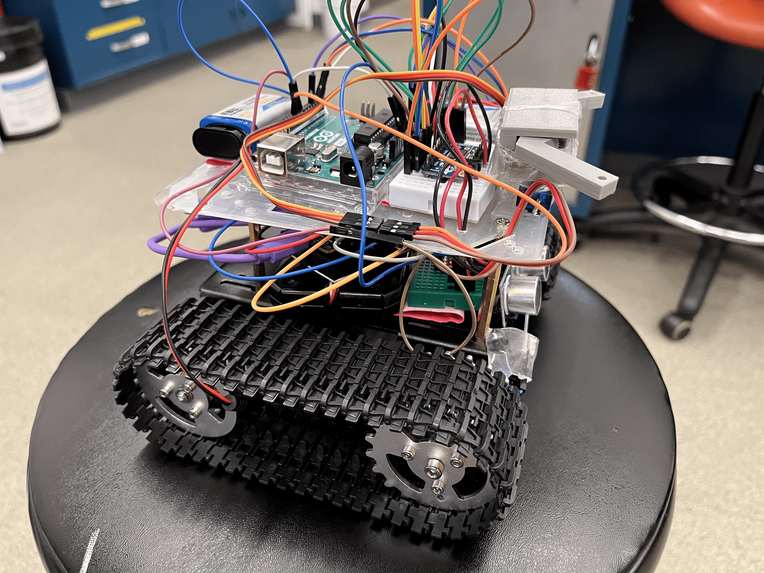
Side View of Robot (Bottom Level - NodeMCU, Logic Level Shifter)
-
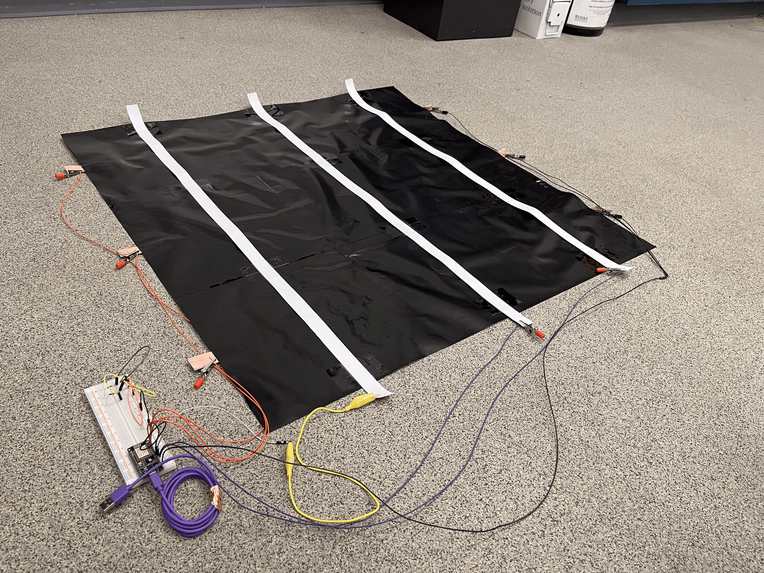
Velostat Grid (NodeMCU to Read Coordinates)
-
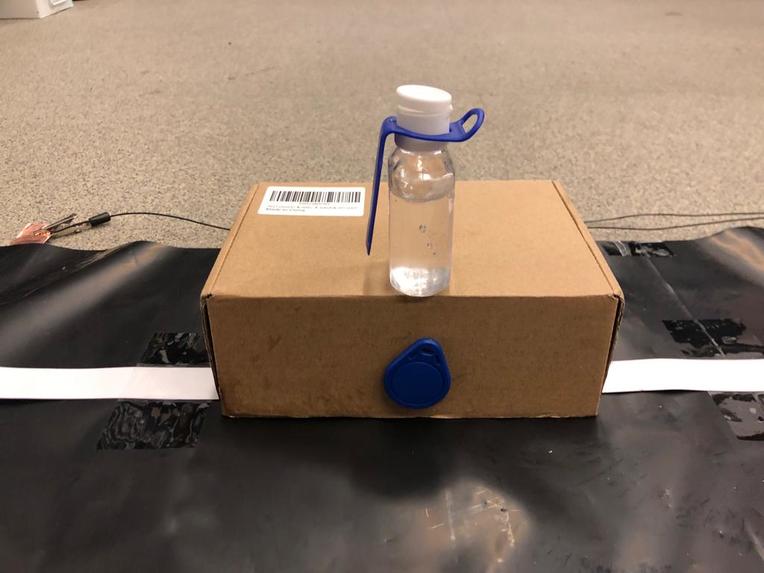
RFID Tag on the Target (i.e. Butter)
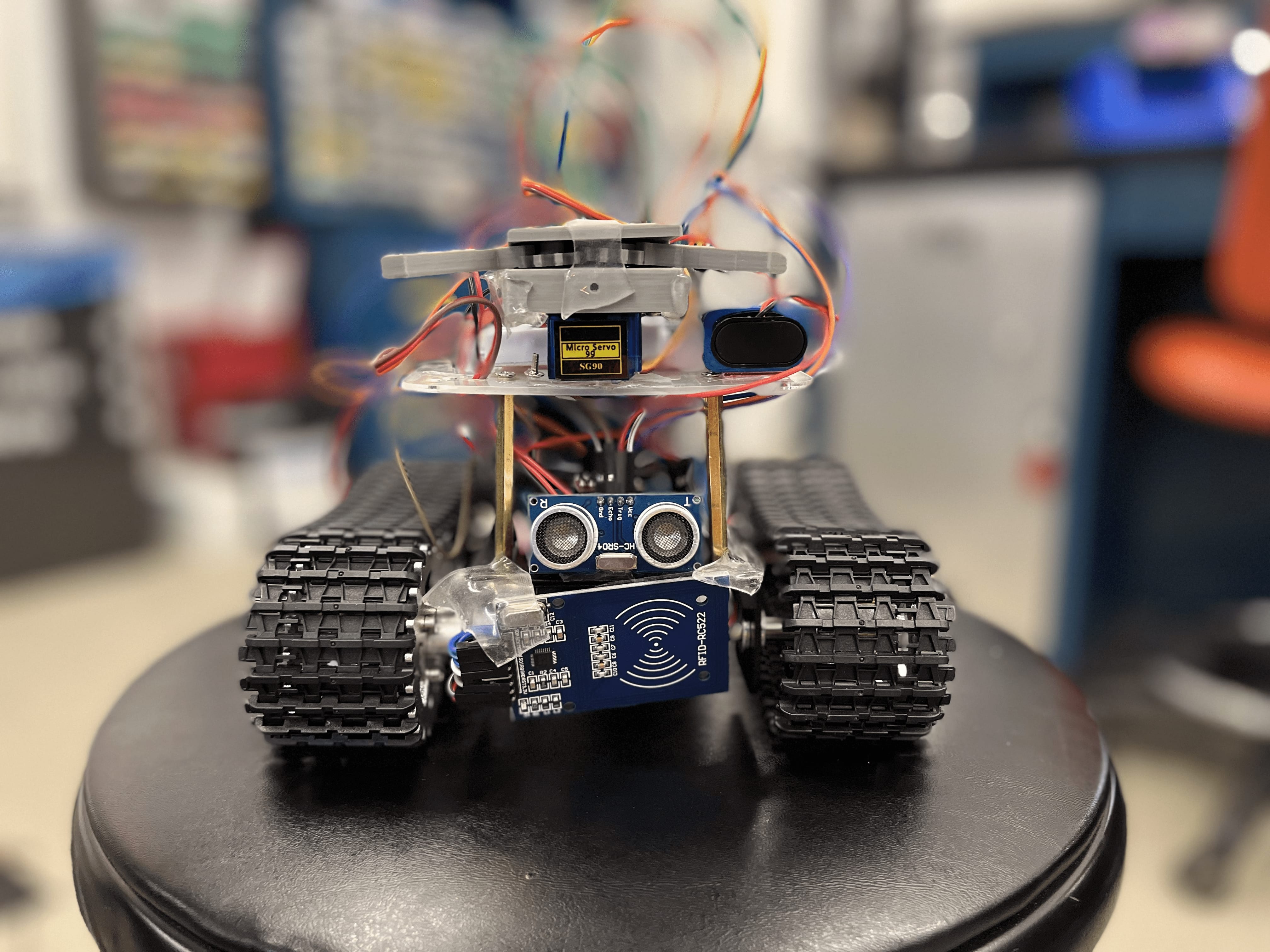

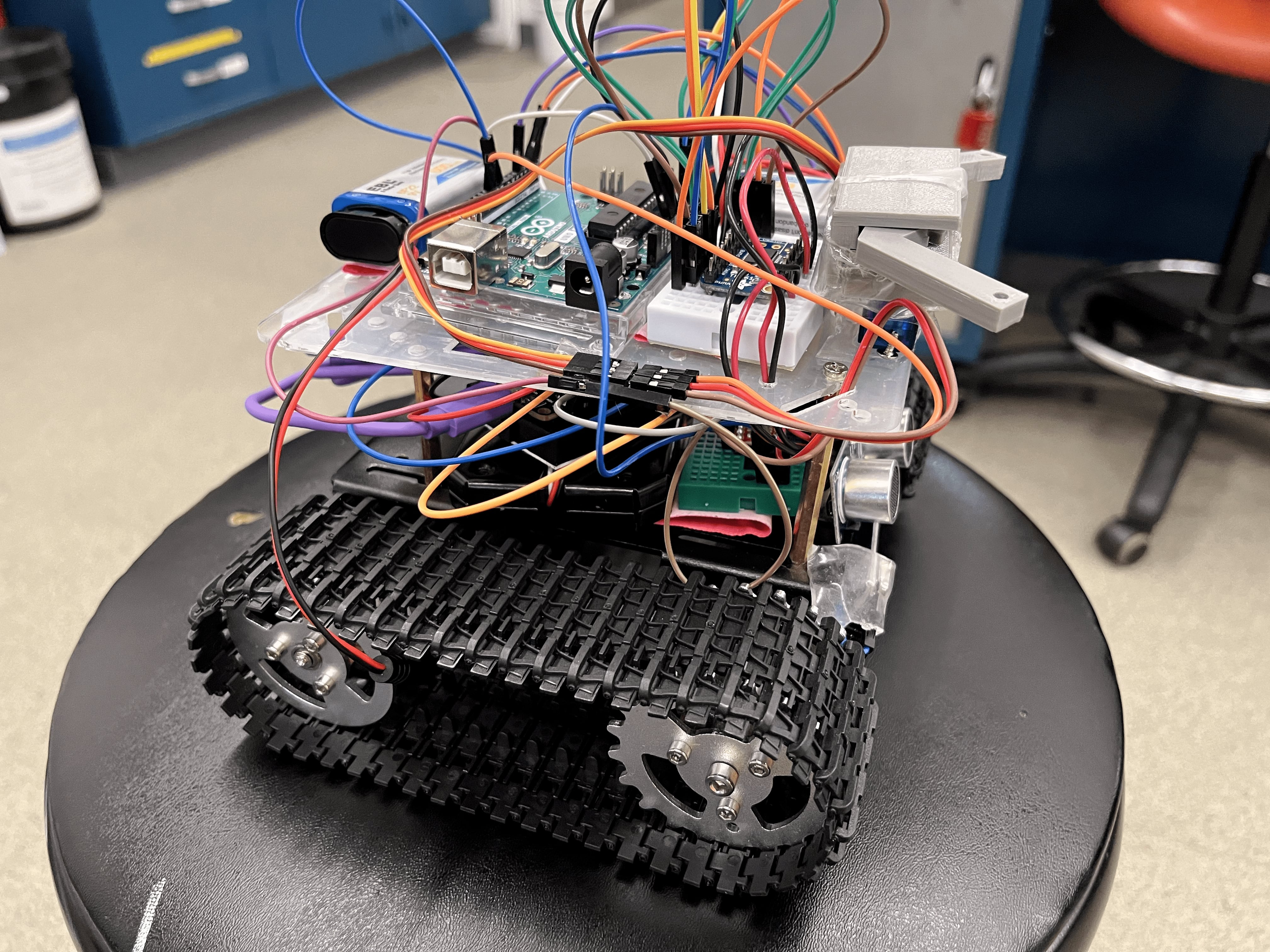
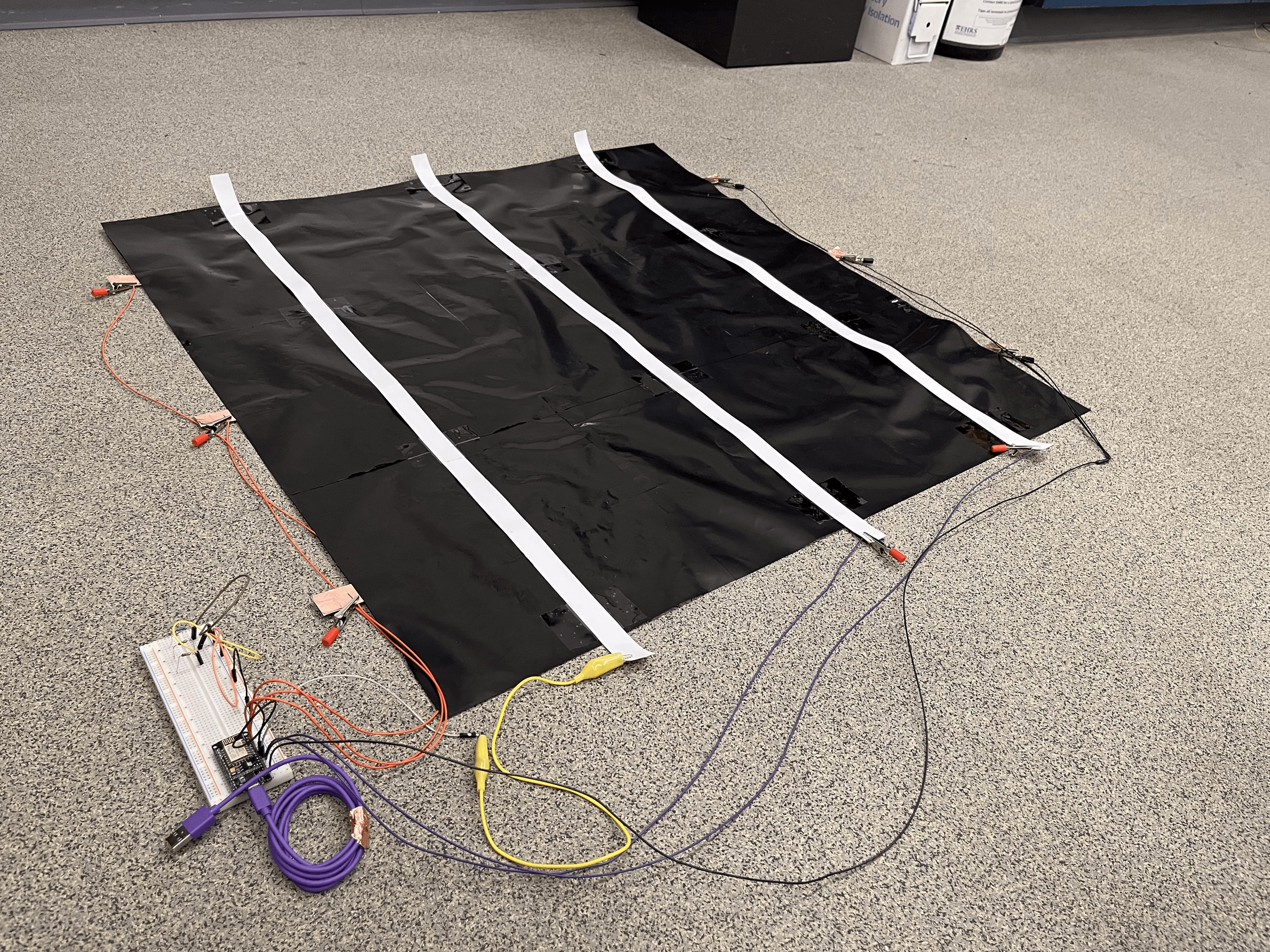
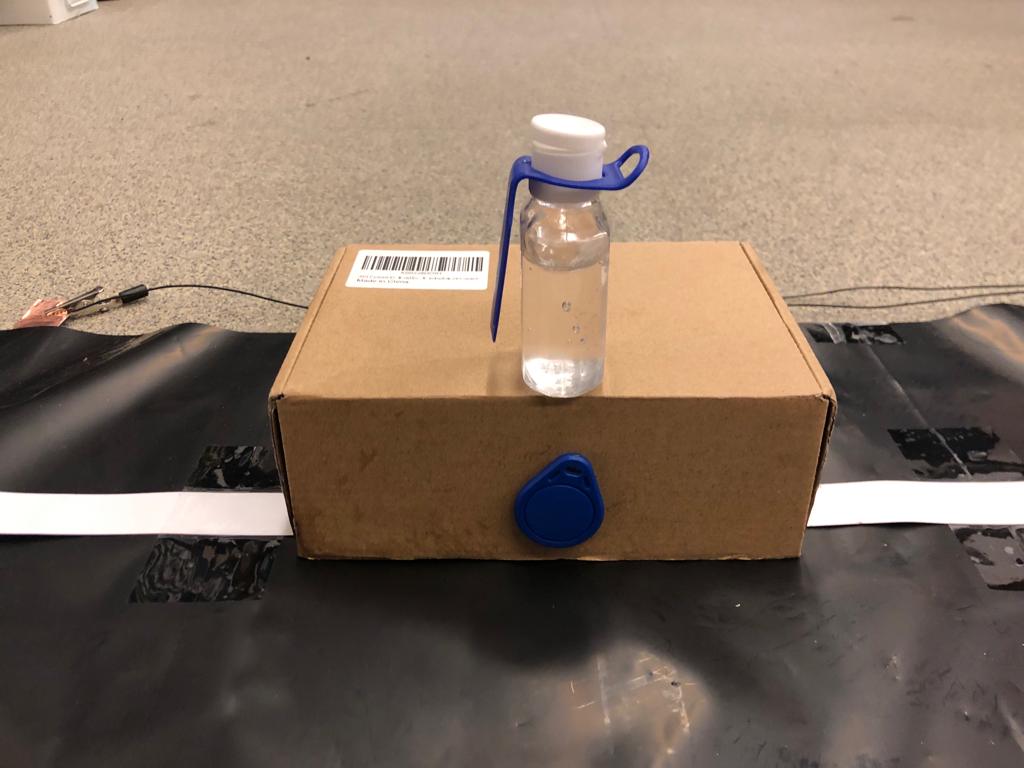
The project is an autonomous robot that searches for and grabs the desired object, then returns it to the destination. The autonomous robot maps the area plans a path through all objects detected and then scans for the target object. If the scan test result is positive that means the object is detected. The robot then grabs the object using 3D printed claws. The robot then traverses to the destination and drops the object. A unique solution is implemented to solve the problem of indoor localization and navigation for autonomous systems using Velostat. Once the coordinates were obtained, the bot used a path planning algorithm to traverse through all coordinates that had objects on them. The target object has a unique RFID, for which the bot scans. If the desired RFID is scanned, the robot grabs the object and place it at the destination. The robot can automate supply chains processes where goods are to be stacked/loaded like a retail warehouse.

Log in or sign up for Devpost to join the conversation.