-
-
-
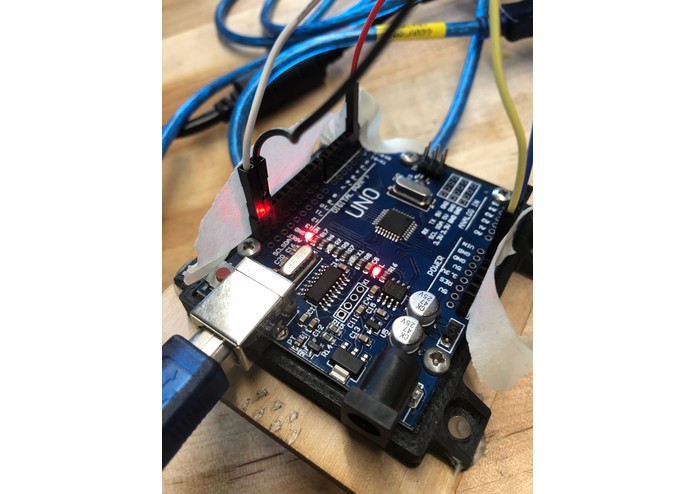
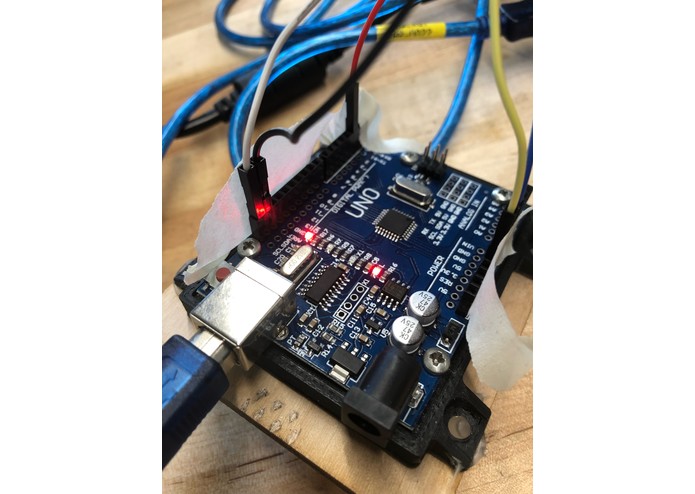
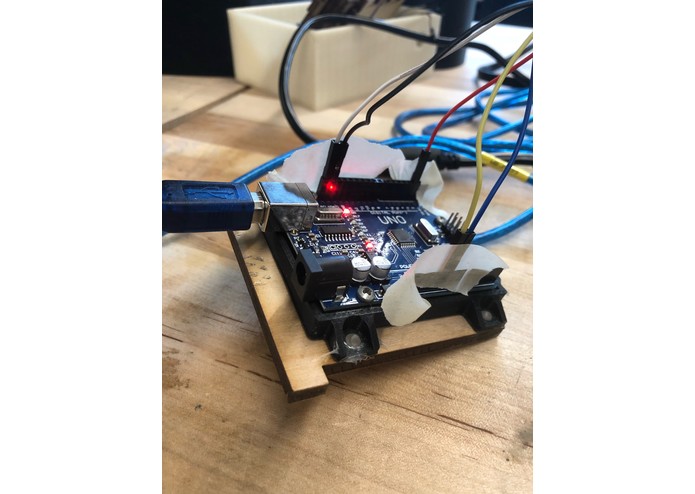
Arduino UNO
-
-
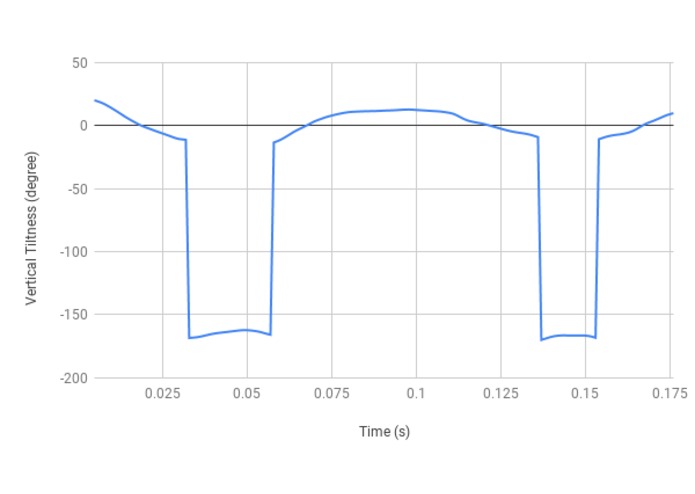
Data as we measure it on different surfaces
-

-





Inspiration
Scooter riders were having difficulty riding on Atlanta road. My roommate came home with a broken arm because she fell off. We journeyed out to find a solution.
What it does
Ideally, the solution will dump the inclination data onto GIS map to match them. The GIS map will indicate where the most bumpy and unsafe sidewalks are. The Accelerometer will measure how tilting the road is consistently, and report where there are noticeable difference between flat ground and pumps.
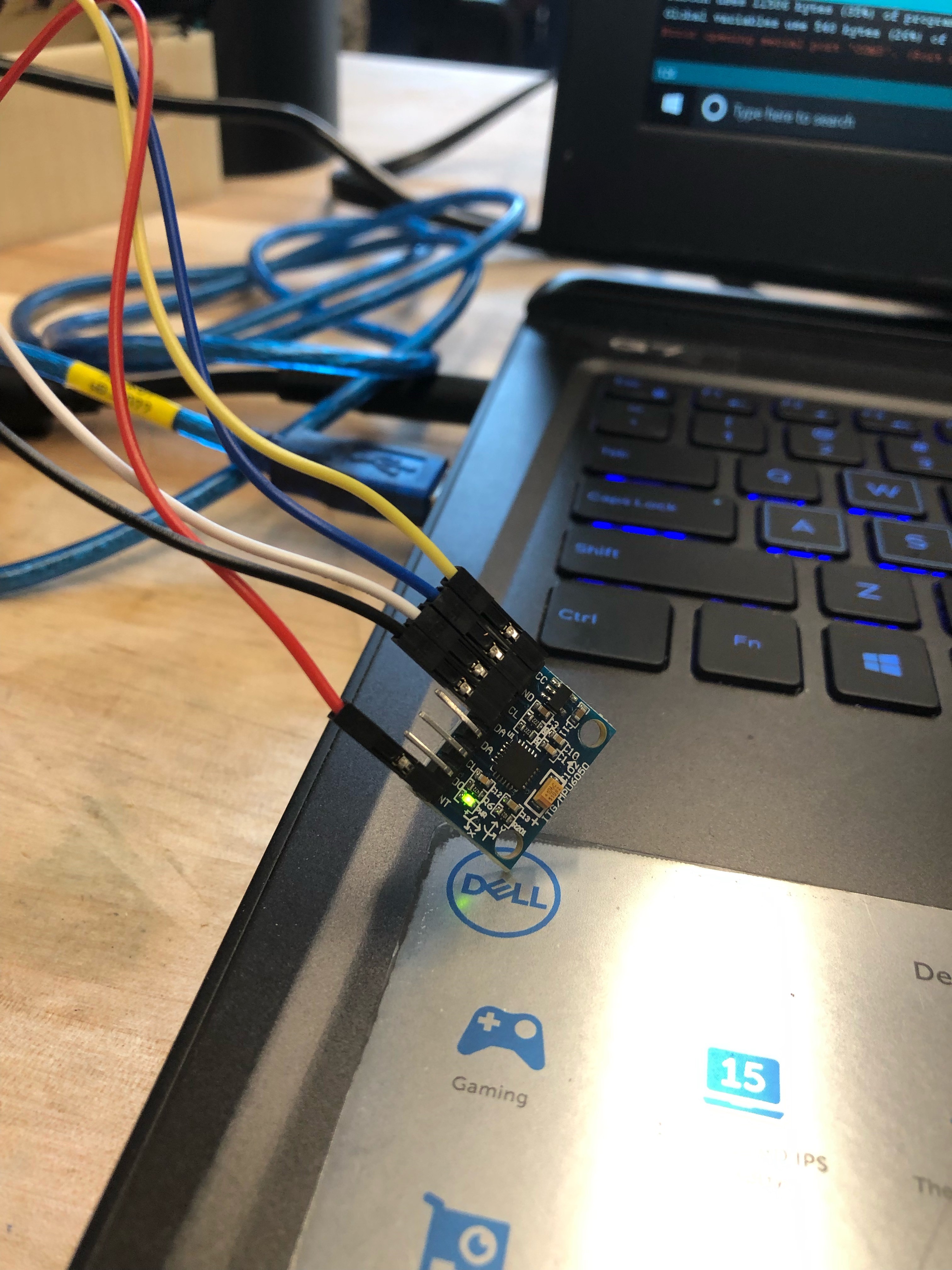
How I built it
We used an Arduino UNO to construct the 6-axis Gyroscope and Accelerometer MPU 6050 to detect rotation motion. We also built a prototype of a scooter to think out where exactly we could put this hardware. In a perfect world where there were still Raspberry Pi available to us, we would use that instead of Arduino UNO in order to store data in SD card or have a built in wireless card.
Challenges I ran into
We did not have a Raspberry Pi(sad react). The wiring process of connecting the MPU 6050 with the Arduino was tedious because everything was so loose and we lost connectivity easily.
Accomplishments that I'm proud of
We are proud of having a working prototype of the MPU 6050 with a 3D printed scooter. We also are proud of dividing work efficiently between team members, so we got a lot more done than we expected.
What I learned
We learned how Arduino UNO worked in general, how to wire different hardware together and maintain steady connections. We also learned how to 3D print and laser cut.
What's next for Bumpity Scooter
We will work on the Raspberry PI version of this, and we are excited to implement the MPU 6050 from scratch from a Raspberry Pi. Maybe we would use a real scooter to test it also.
Built With
- 3d-printer
- accelerometer
- arduino
- laser-cut
- processing
Log in or sign up for Devpost to join the conversation.