
Goal
Design, build and develop a robot that can quickly map, navigate, and find the shortest path of a maze with no prior knowledge.
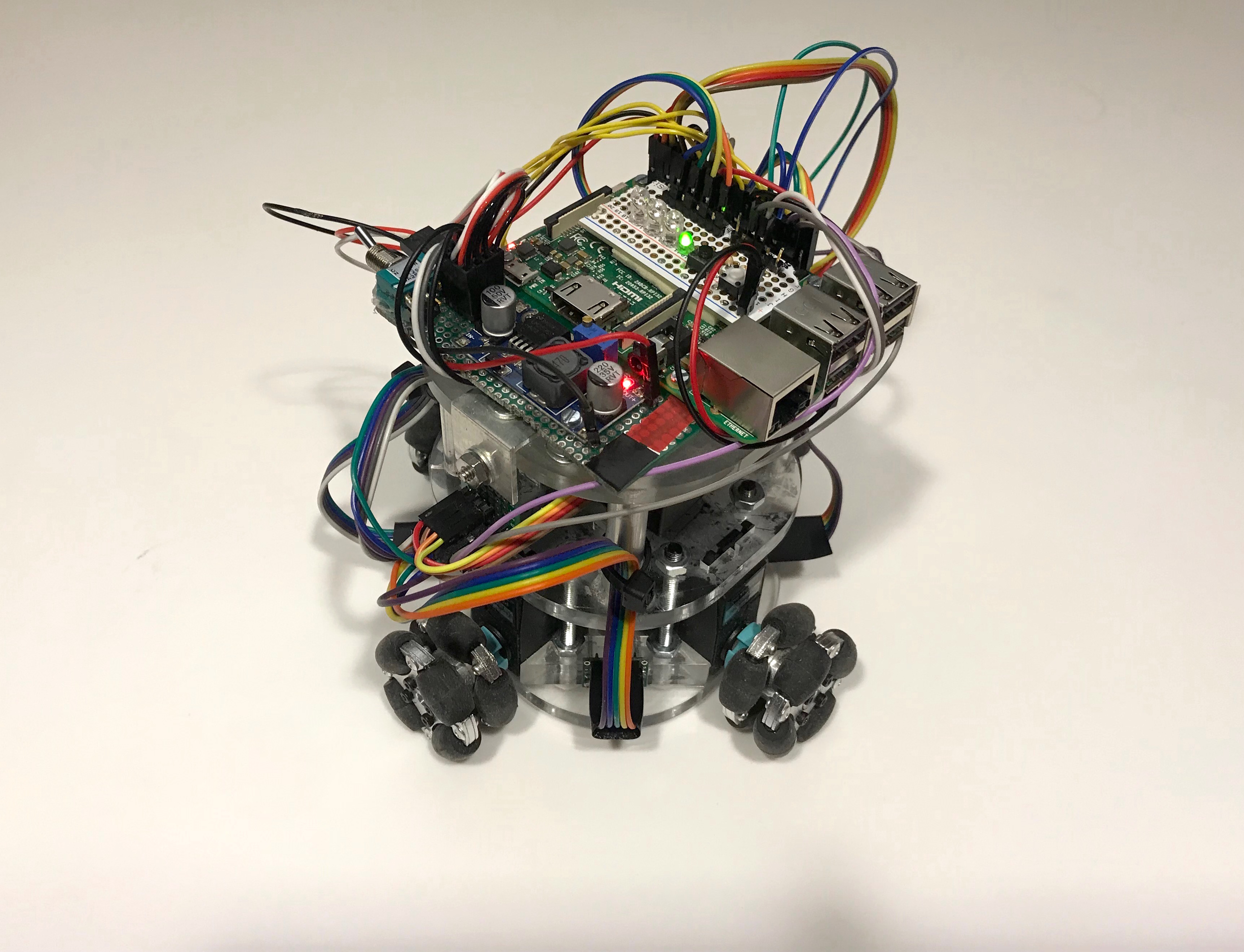
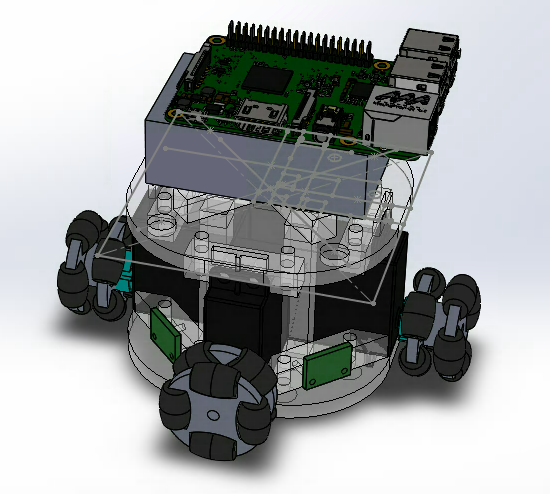
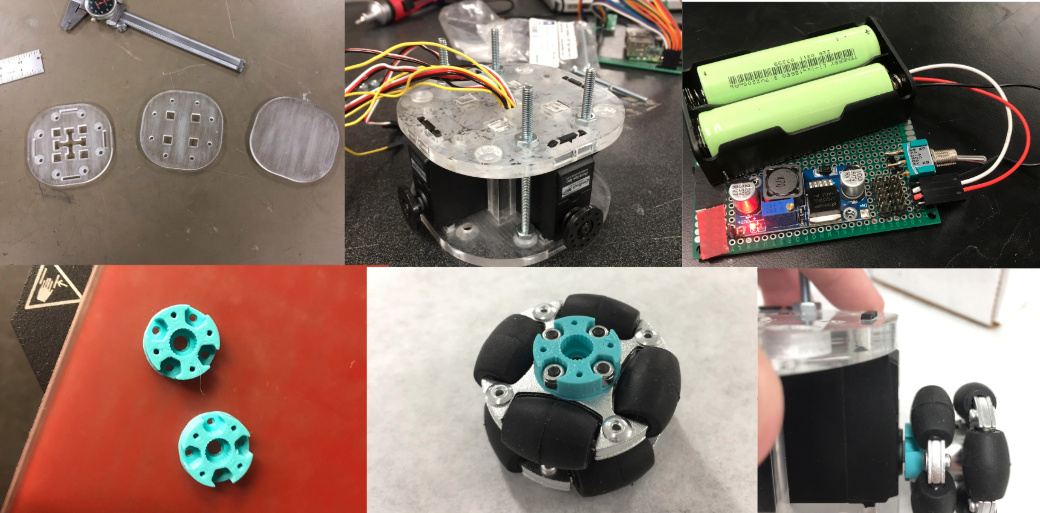
Construction

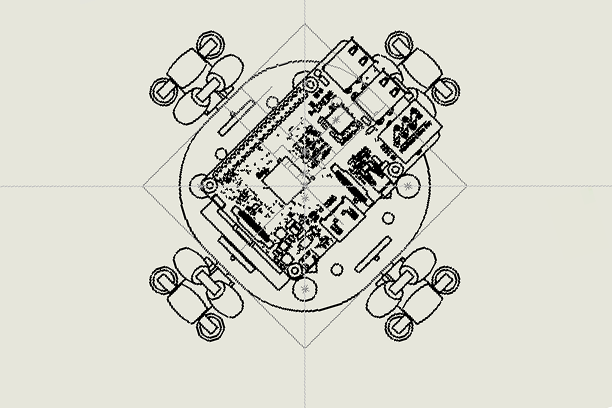
The robot was designed in Solidworks, and constructed out of laser-cut acrylic, aluminum, and 3D printed components. The design incorporated the following elements:
- VL6180X - Lidar Sensors
- Hall-Effect Sensored Servos
- Raspberry Pi 3 B
- 18650 Li-Ion Batteries
- Holonomic Omnidirectional Wheels

Software

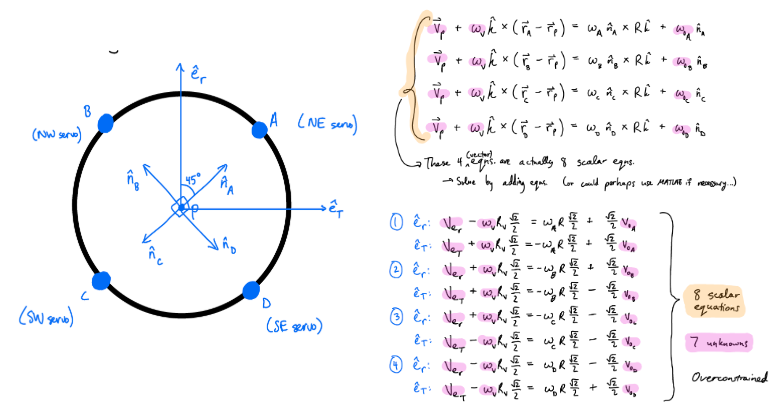
The vehicle was modeled as an over-constrained system of 8 scalar equations. Data from the servos and Lidars are collected using a multithreaded Python framework. The data is filtered and used to correct the vehicle's pose using a P-controller as the vehicle travels through the maze. The maze is modeled as an adjacency matrix and Tremaux's algorithm is used to find the shortest path through the maze.
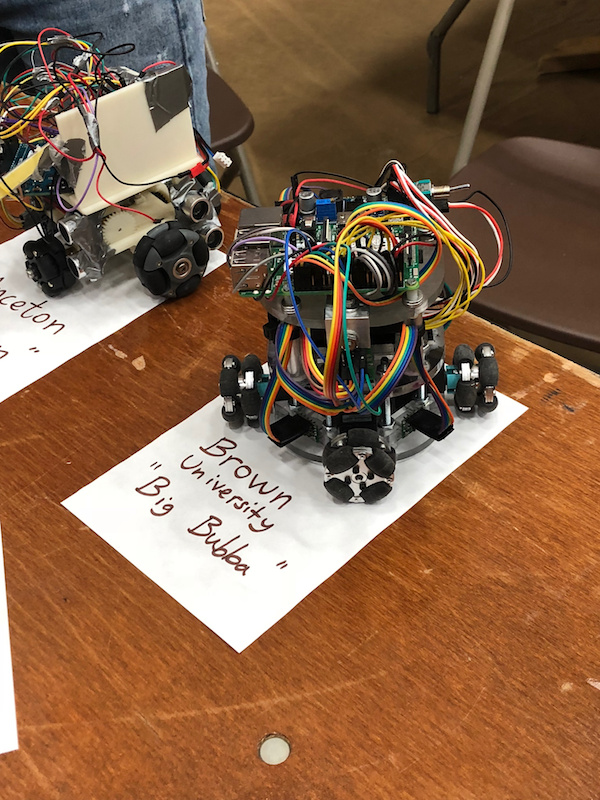
Competition
This project was part of the Brown Robotics Olympiad competition which took place on April 7th. We presented our robot and competed against other schools from the East coast and placed 3rd in the competition.

Built With
- c++
- python
- raspberry-pi
- vl6180x


Log in or sign up for Devpost to join the conversation.