-
-
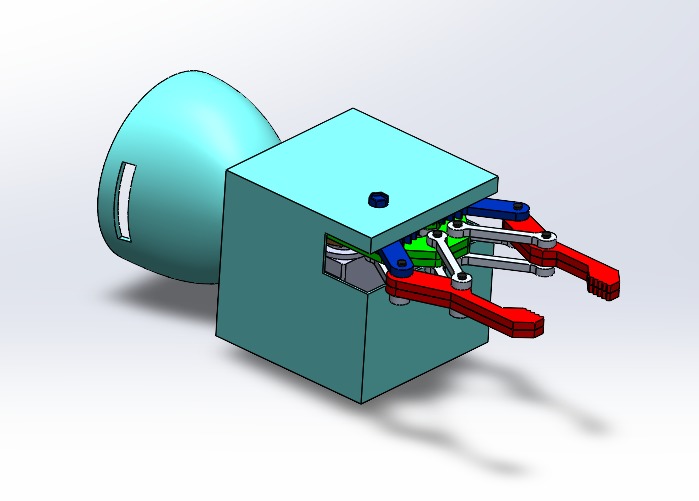
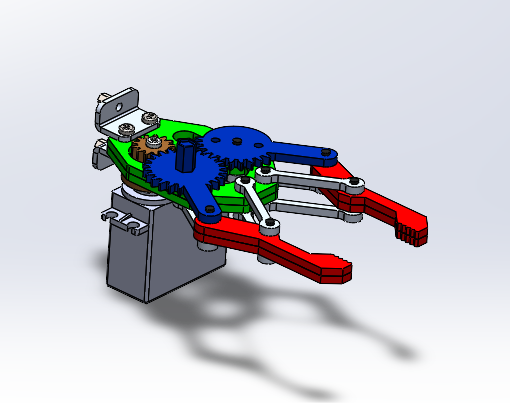
Gripper to grasp LEGO pieces
-
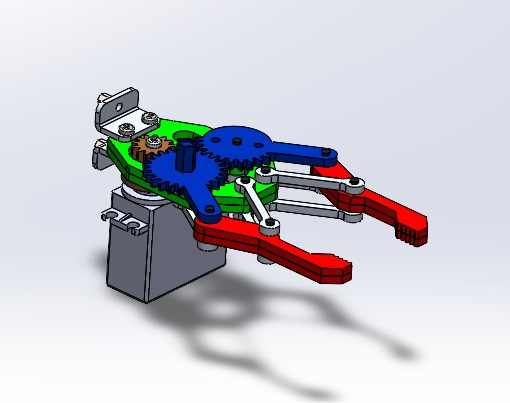
Gripper without external housing to highlight internal mechanism
-
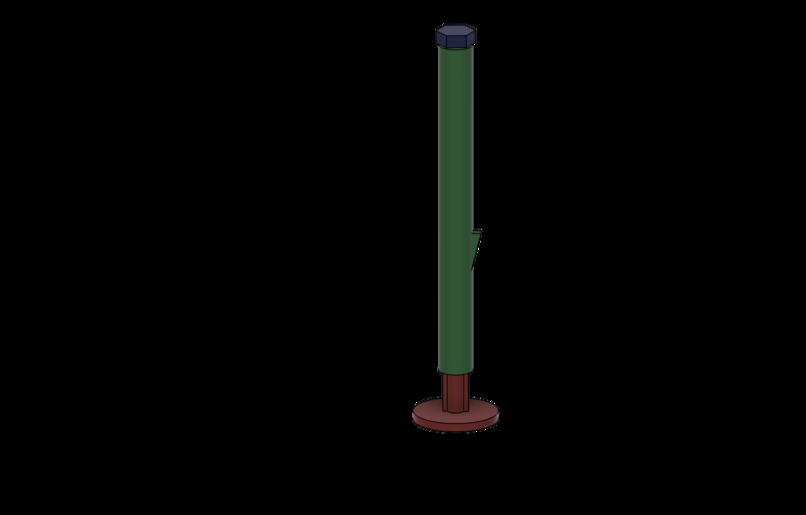
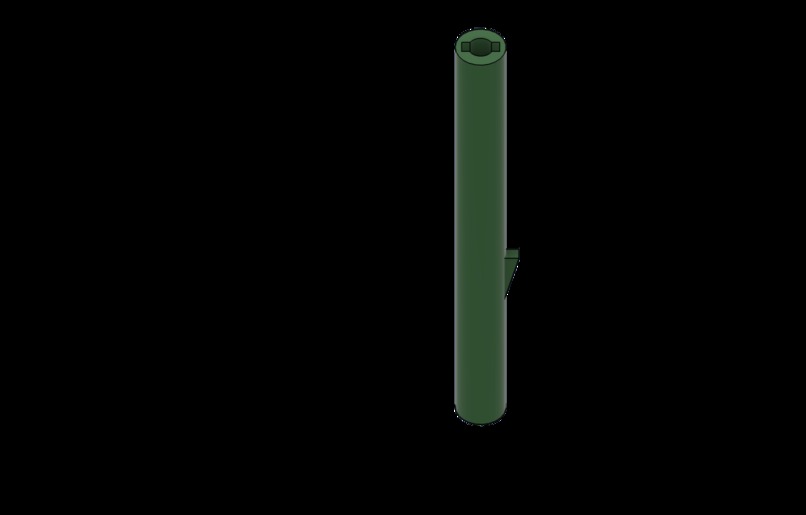
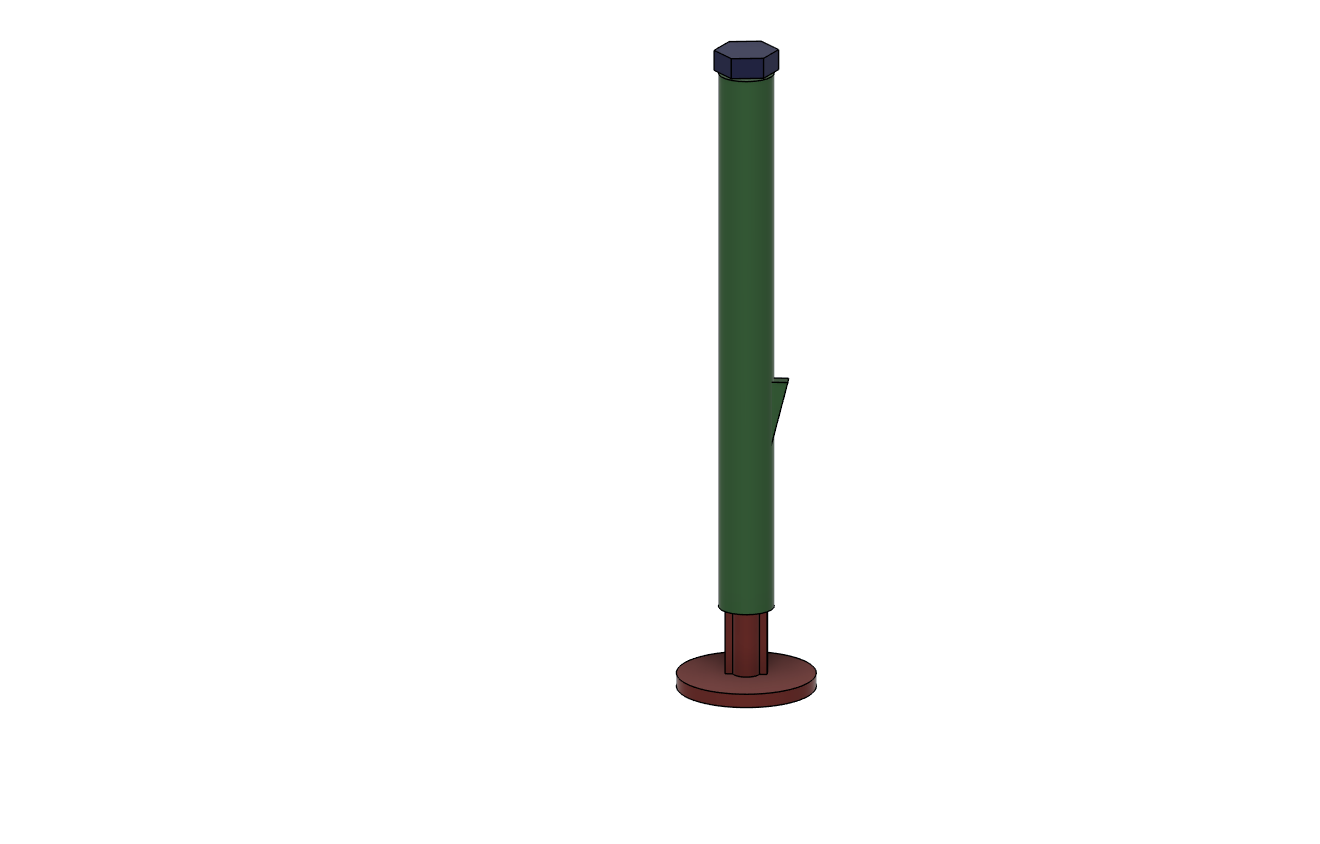
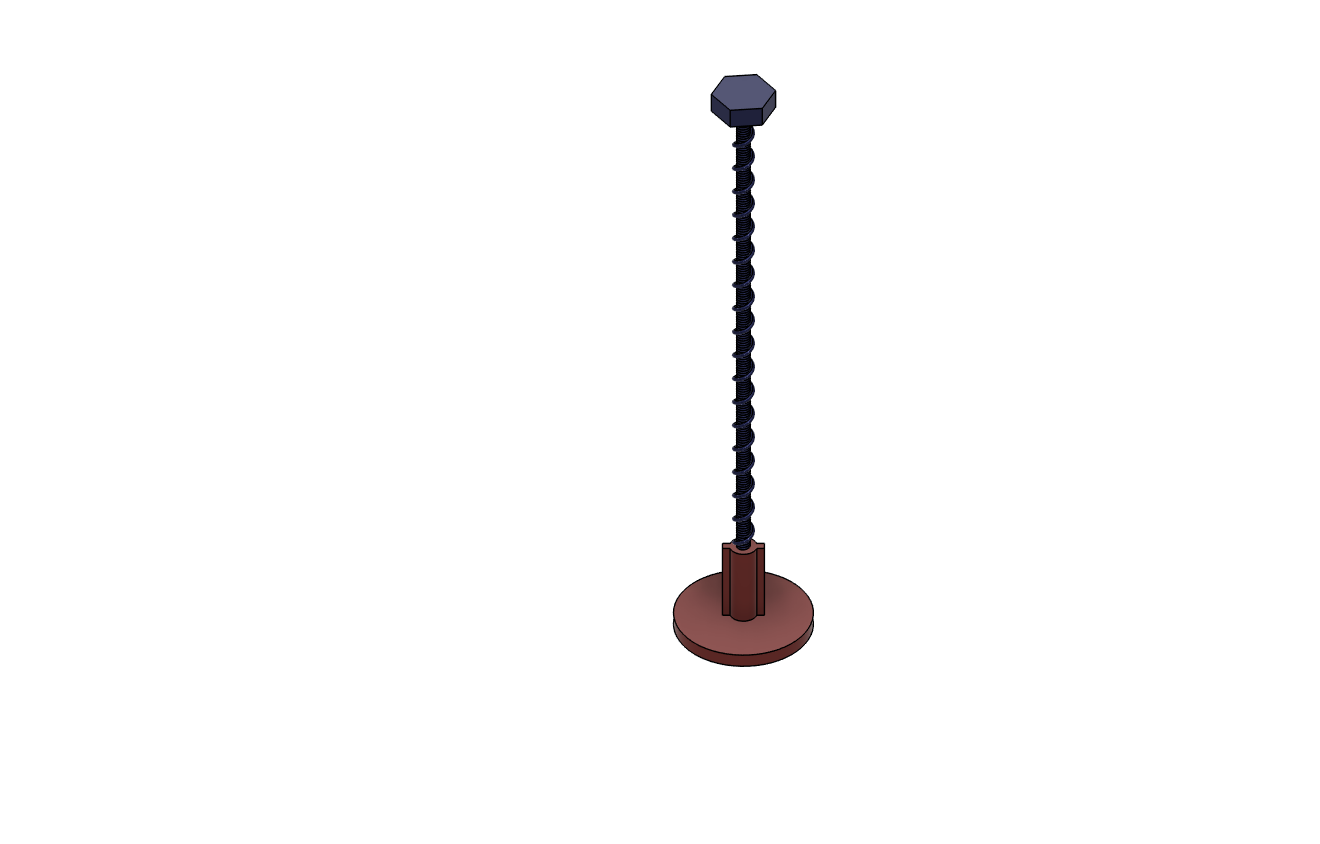
Plunger to push pieces together
-
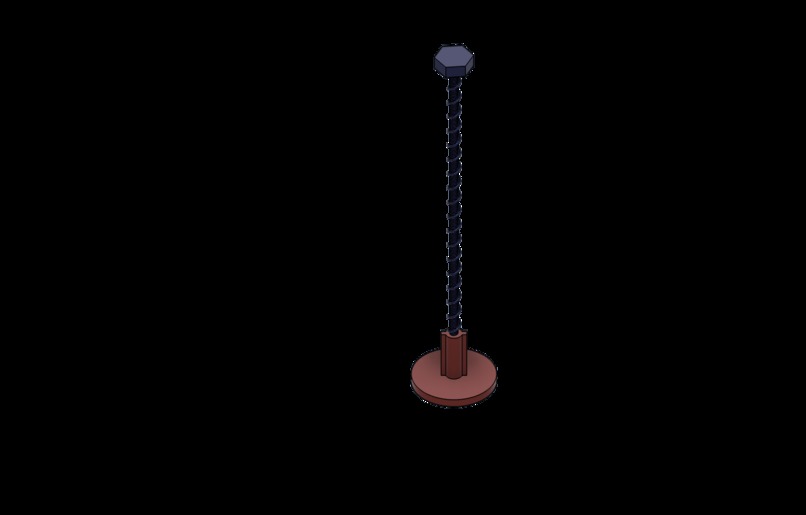
Plunger without external casing to highlight internal spring mechanism
-
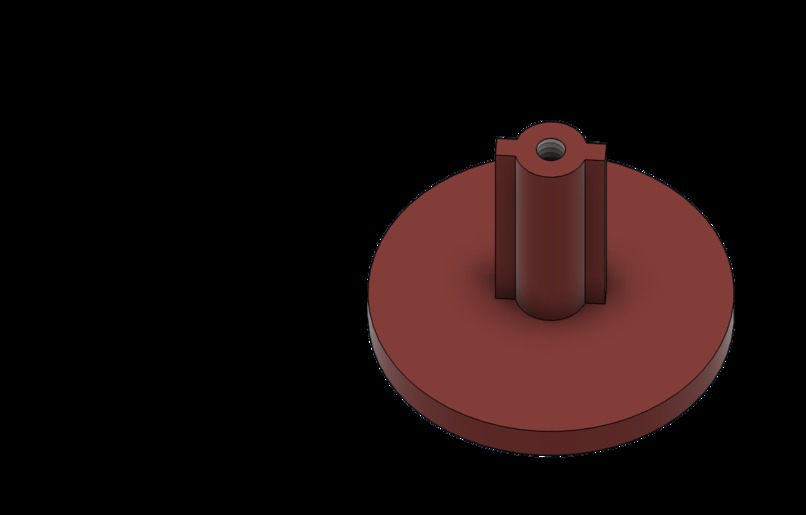
Plunger head
-
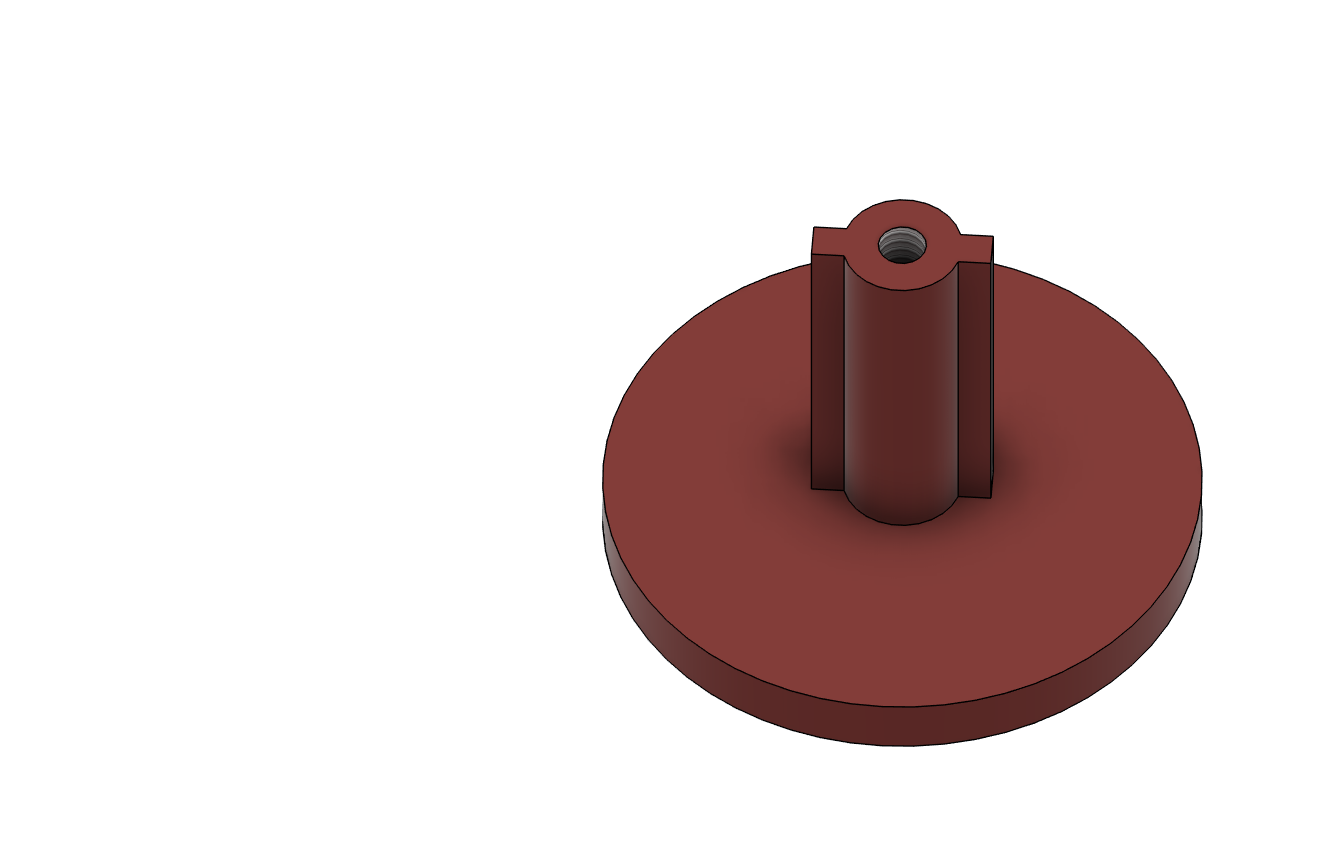
Plunger casing
-
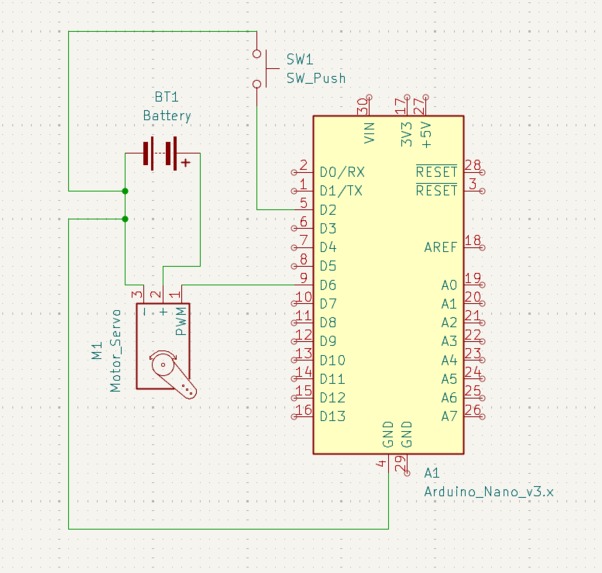
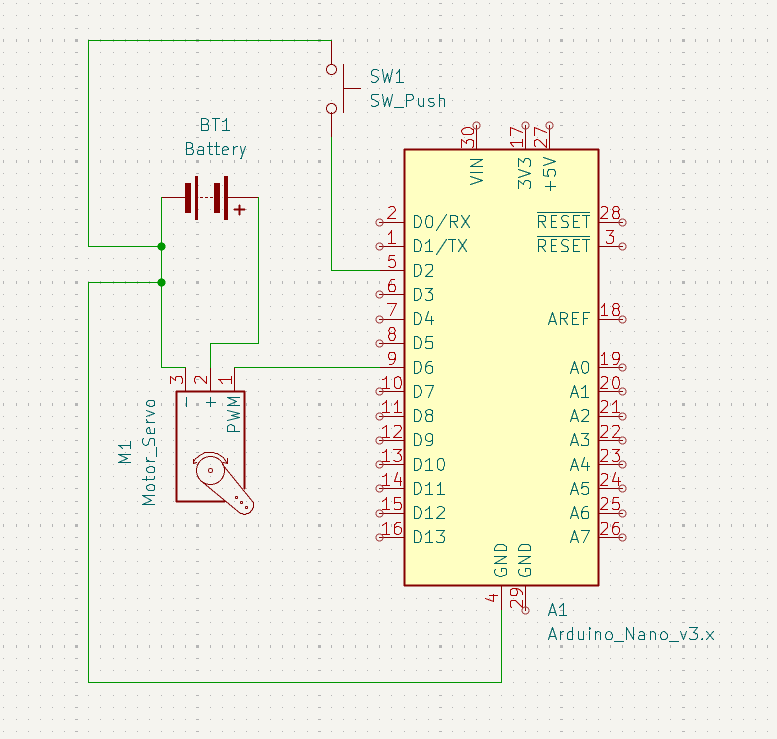
Wiring diagram for the servo motor and arduino
-
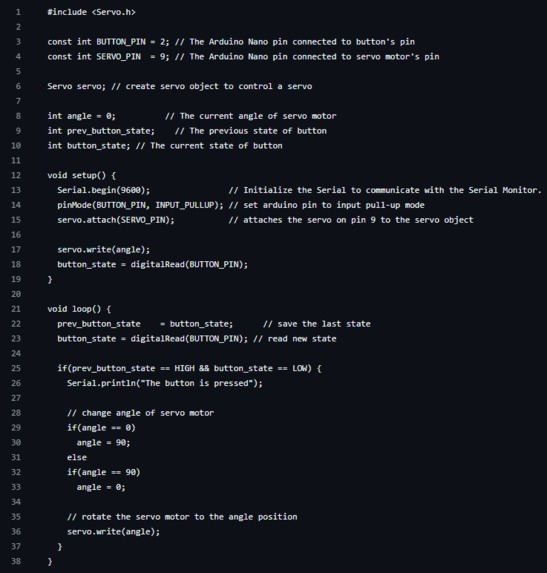
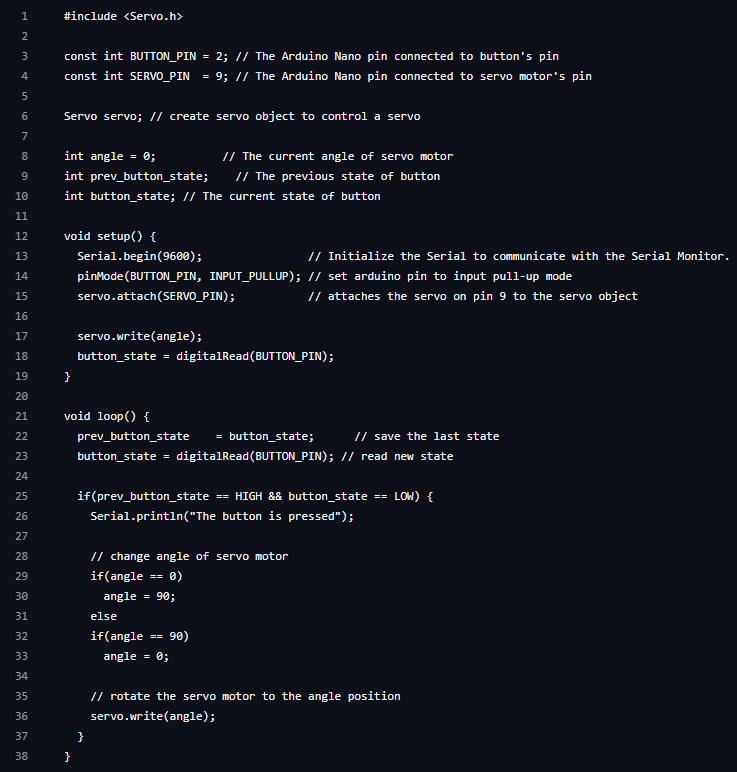
Arduino code to control the servo motor

Functionality: What does the device do and how does it address the recipient's request?
This device enables a child to grip LEGO pieces and use a mechanical plunger to connect them together. The system is specifically designed to apply minimal force to the user’s skin, preventing further blistering or injury associated with Recessive Dystrophic Epidermolysis Bullosa. By amplifying the user’s input force through mechanical advantage and offloading loads away from sensitive skin, the device allows the child to participate in LEGO building safely and independently.
An electronic gripper holds and positions LEGO bricks with minimal user effort, eliminating the need for pinch strength. A separate mechanical plunger applies the required downward force to connect the bricks, isolating high-force pressing from the user’s fragile skin. The plunger can be rewound using the gripper’s motor, preventing additional manual strain.
Design Process: How was the model developed?
The design process began by identifying the critical need: the child required a significant amplification of gripping force in order to manipulate LEGO pieces. To address this, a linkage-based mechanism was developed to create a high mechanical advantage, allowing the pieces to be grasped with minimal user effort.
In addition, the same gripper can be used in conjunction with an existing LEGO removal aid to separate pieces using very low force. A complementary mechanical plunger was also designed for the opposite hand. Approximately the size of a pencil, this plunger applies a controlled force to LEGO pieces when properly aligned, enabling secure attachment with minimal strain on the user.
Cost and Manufacturability
The device was designed to be affordable and easy to produce. Wherever possible, we used widely available off-the-shelf components to reduce cost and simplify sourcing. Structural parts were designed around standard stock sizes and nominal dimensions, minimizing fabrication complexity.
Load-bearing components have simple geometries that are easy to machine using conventional methods. Any parts with more complex shapes are non-structural and can be manufactured through low-cost 3D printing. Because the gripper is adaptive and compliant, it does not need to match the tight tolerances of LEGO bricks, reducing precision manufacturing requirements. Overall, the system avoids expensive electronics and highly customized components, resulting in a practical, scalable design with a clear and economical path to production.
Challenges & Triumphs: The obstacles your team overcame and the accomplishments you are most proud of.
The primary challenge was designing a device that could function effectively while exerting as little force as possible on the child’s skin. Supporting the device without transferring its weight directly onto the arm was particularly difficult, as any concentrated pressure risked causing injury. This challenge was addressed by selecting lightweight materials, primarily plastics, and by designing a forearm brace that distributes the load across a large surface area. This significantly reduces the pressure applied at any single point on the arm.
Another major design evolution involved transitioning from a fully mechanical scissor-linkage system to an electrically actuated design. Through further research and prototyping, the team successfully integrated the original mechanical gripper and plunger concepts with an electrical actuation system. This hybrid solution represents one of the team’s greatest achievements.
What we learned: Key takeaways from the design and prototyping process.
This project highlighted the importance of material selection in engineering design. The initial plan was to use primarily metal linkages due to their durability and ease of machining. However, because LEGO pieces are lightweight and do not require high gripping forces, such strong materials were unnecessary. Switching to plastic components significantly reduced the overall mass of the device, thereby decreasing the load applied to the child’s arm and improving comfort and usability without compromising functionality.
Future Roadmap: What are the next steps for evolving this design?
Future iterations of this device could integrate the gripper and plunger into a single, unified mechanism, enabling the child to build LEGO structures using only one hand. Additionally, incorporating natural wrist motion into the actuation strategy would create a more intuitive and ergonomic user experience. Leveraging this natural movement would allow for smoother operation and improved control, further enhancing both comfort and independence for the user.
Built With
- autodesk-fusion-360
- solidworks

Log in or sign up for Devpost to join the conversation.