OBR Scanner (BrailleEdge)
Deterministic Optical Braille Recognition at the Edge
👁️ Inspiration
Current mobile accessibility tools for the visually impaired suffer from a critical design flaw: they rely heavily on bloated, power-hungry deep learning models that are slow, require continuous internet connectivity, and are prone to hallucinations. In the domain of accessibility technology, an AI hallucination is not just a minor bug—it is an active safety hazard. If a neural network guesses an incorrect character on a medical label or an instruction manual due to poor ambient lighting, the product is fundamentally unsafe.
BrailleEdge was born from a desire to build a zero-GPU, sub-millisecond, completely offline translation tool that replaces probabilistic guessing with mathematical determinism, prioritizing transparent uncertainty over confident AI hallucinations.
🤖 What it does
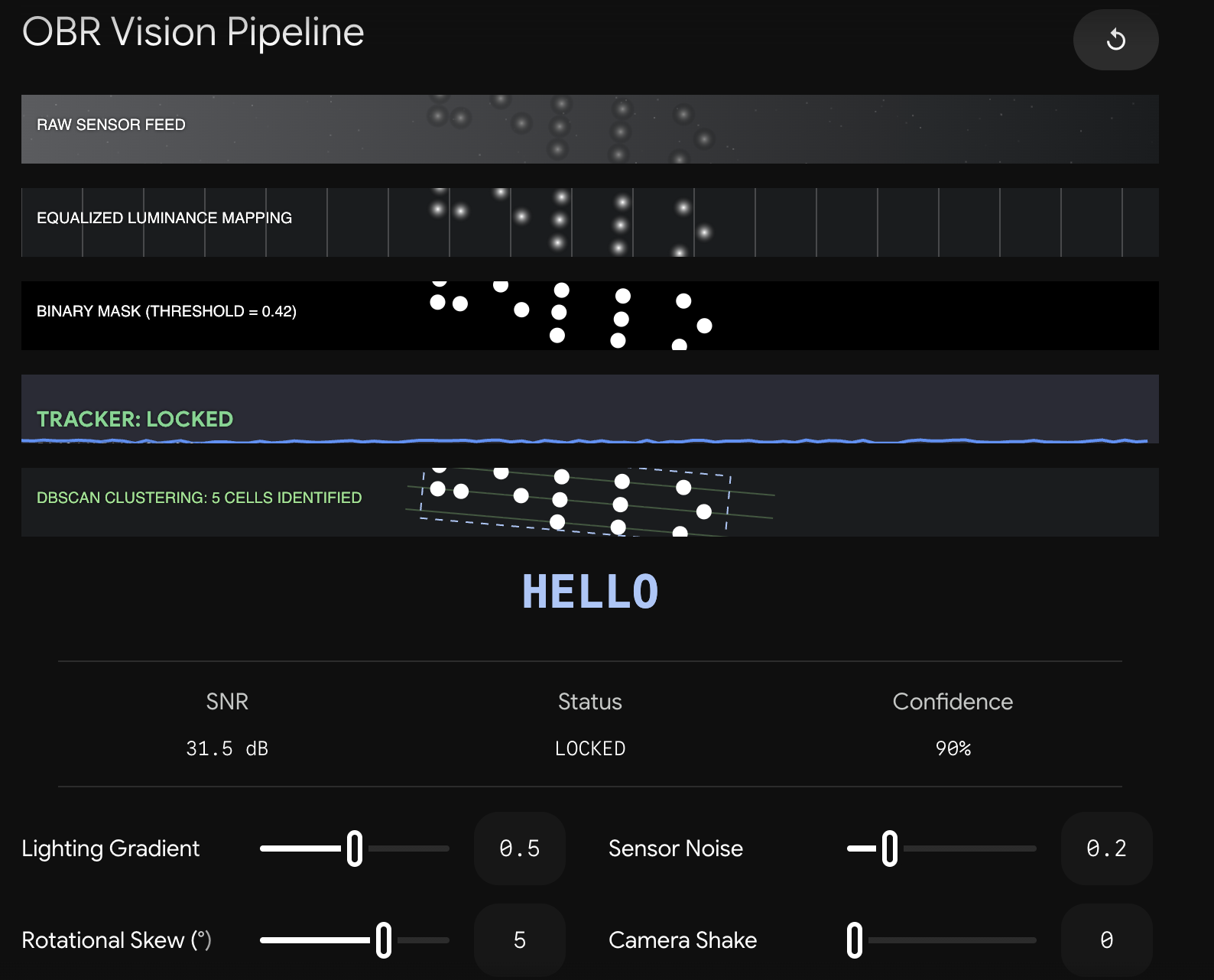
BrailleEdge is a real-time, edge-based Optical Braille Recognition (OBR) scanner. Operating directly through a native camera stream, the application continuously analyzes frames and uses a high-frequency tracking loop to detect when a document is held stable. Once a lock is achieved, it processes the white-on-white embossed dots, mathematically flattens any skew or perspective distortion, maps the dots onto a standardized grid, and translates Grade 2 (contracted) Braille into English text.
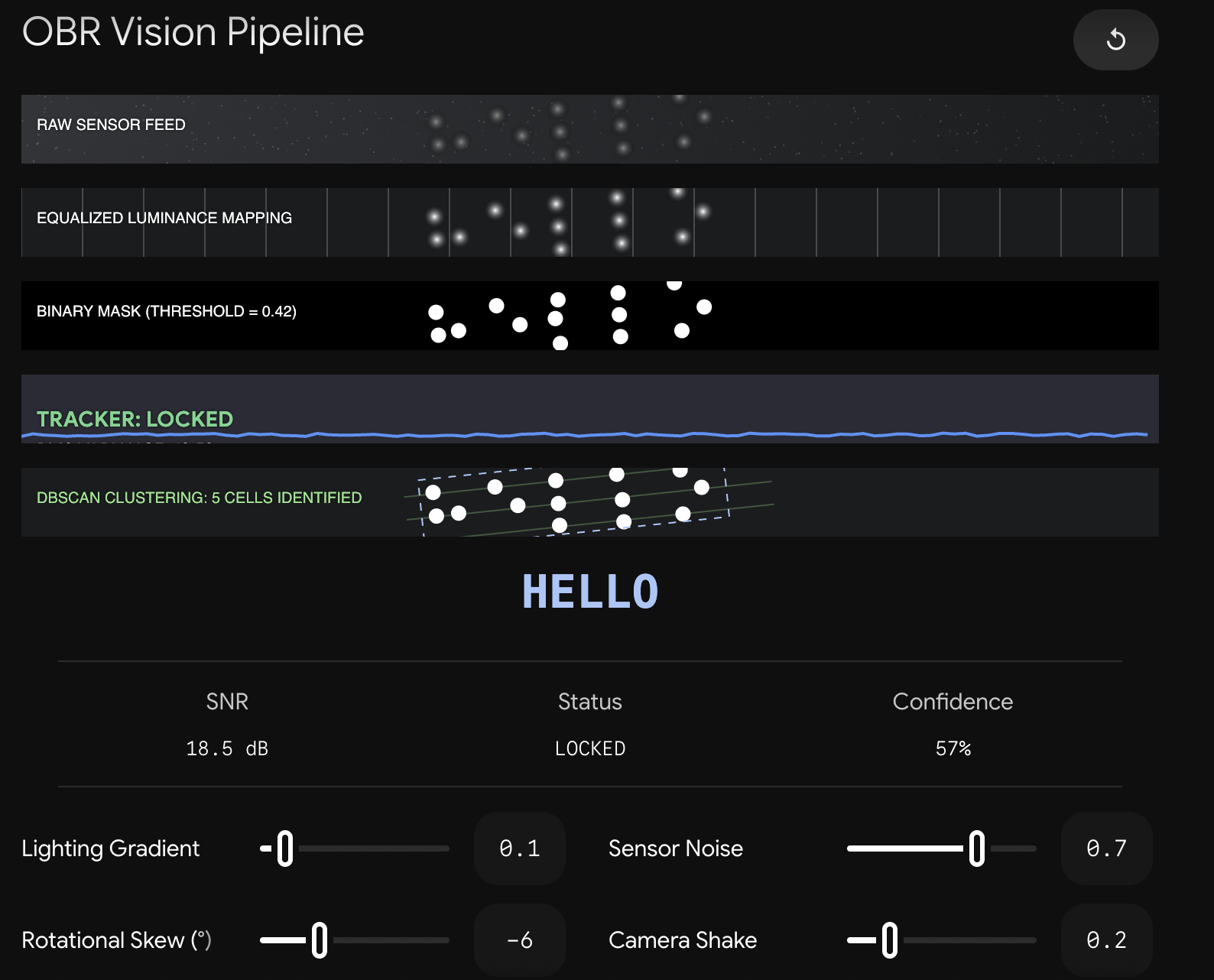
The translated text is displayed instantly on a minimalist, high-contrast dashboard and read aloud via non-blocking audio feedback. If the system encounters extreme noise or geometric ambiguity, it triggers a defensive Confidence Overlay—highlighting the exact physical location of the unreadable cell with a yellow bounding box and rendering a deterministic [?] flag rather than hazarding an unconstrained guess.
🛠️ How we built it
We rejected heavy neural networks entirely and engineered a pure, multi-threaded classical computer vision pipeline in Python, wrapped in a high-end Streamlit frontend.
- Thread A (The Stability Loop): Runs a lightweight blob detection loop that tracks a rolling, coordinate-wise variance buffer matching $O(K)$ complexity constrained within a visual Region of Interest (ROI) box. This guide acts as a spatial bandpass filter, ignoring peripheral noise (like fingers or desk edges) and functioning as a UX-layer proxy for hardware autofocus locking.
- Thread B (The Core Processing Engine): When Thread A triggers a stable lock, a high-resolution frame is captured and passed through a two-stage spatial isolation sequence. First, CLAHE acts as a macro-equalizer to flatten low-frequency illumination gradients (like harsh overhead shadows). Second, Adaptive Thresholding targets the high-frequency micro-shadows cast by the 0.48mm embossed dots.
- Projective Geometry Correction: To resolve physical alignment issues, the pipeline extracts a point-cloud convex hull of the validated dot keypoints. It feeds these coordinates into a domain-restricted, RANSAC-filtered homography solver (
cv2.findHomography), executing a projective warp that mathematically flattens the page and neutralizes up to 5 degrees of rotational or pitch skew. - Row Segmentation & Phase Retrieval: The normalized point cloud is grouped into horizontal rows via a fast 1D DBSCAN track-segmenter. To map these rows into cells without cascading phase-shift errors (caused by leading paragraph indentations or isolated prefix markers), the system models the asymmetric spatial layout of the Braille cells. It runs a global sum-of-squared-errors (SSE) phase minimization across the entire row sequence, matching the observed dots to the correct spatial grid frequency.
- Downstream Translation & Audio: The resolved 6-bit binary matrices are passed to Liblouis for deterministic Grade 2 translation, while a daemonized background queue handles text-to-speech rendering via Pyttsx3 without degrading the camera UI's frame rate.
🚧 Challenges we ran into
- The White-on-White Boundary Problem: Standard document scanners use high-contrast edge detection (like Canny filters) to find the four corners of a white piece of paper on a desk. Braille cardstock offers zero edge contrast under diffuse lighting. We solved this by completely inverting the tracking paradigm: we ignore the paper borders entirely and treat the inner dot cloud itself as a geometric point constellation, using its outer convex hull to anchor our homography matrix.
- The "Chicken-and-Egg" Processing Bottleneck: To adaptively scale our Gaussian blur filters to the user's distance from the page, we needed to know the median blob diameter. But to find the blobs, we needed to clean the image first. Running a double-pass system destroyed our real-time frame rates. We bypassed this by utilizing a fixed 5x5 spatial low-pass filter strictly optimized as a CMOS sensor-grain cutoff mechanism, letting a strict UX depth-of-field envelope absorb the macroscopic scale variances instead.
- Horizontal Grid Drift: Relying on a greedy local search to identify the first cell column caused the translation grid to slip by entire characters whenever a line started with spaces. Overcoming this required treating the layout not as isolated characters, but as a continuous wave where the inner-cell gap and outer-cell spacing represent two distinct spatial frequencies. Shifting to a global SSE phase minimization completely eliminated horizontal drift.
🏆 Accomplishments that we're proud of
- Systems Architecture Rigor: We successfully developed a highly complex, deterministic spatial data pipeline that achieves sub-millisecond execution times without touching a single GPU or external cloud API.
- Production-Grade Architecture: Our pipeline survived a brutal mock systems-engineering review panel, earning a 9.5/10 scorecard from enterprise computer vision infrastructure standards by executing optimal $O(N)$ sorting, robust RANSAC outlier rejections, and clean error isolation boundaries.
- Defensive Product Design: Creating a technical solution that places a visually impaired user's physical safety ahead of standard tech-industry "AI hype" by making the scanner explicitly surface its own uncertainty.
🧠 What we learned
We learned that embracing hard technical constraints often yields infinitely better engineering than defaulting to data-heavy modern AI stacks. By digging back into fundamental signal processing, projective geometry, and spatial frequency analysis, we resolved structural and environmental anomalies that typically break even advanced deep learning models. We also reinforced the lesson that UX can actively serve as a hardware proxy—properly designed user constraints can eliminate thousands of lines of computational overhead.
🚀 What's next for BrailleEdge
Our immediate production roadmap focuses on transitioning from a rigid binary thresholding model to a 6D Soft-Lattice Intensity Decoder.
Instead of forcing a pixel grid into absolute 1s and 0s at the OpenCV layer—which causes dropouts in marginal lighting—we will extract the continuous localized intensity gradient at each mathematical node as a continuous probability vector. This soft lattice array will then be passed downstream into a specialized decoder constrained strictly by topological Braille Edit Distance pathways. This will allow the software to leverage contextual English n-gram linguistic correction while mathematically bounding its predictions to the physical constraints of the camera sensor, entirely eliminating the threat of unconstrained translation hallucinations.
Built With
- liblouis
- numpy
- opencv
- pyttsx3
- scikit-learn
- streamlit


Log in or sign up for Devpost to join the conversation.