-
-
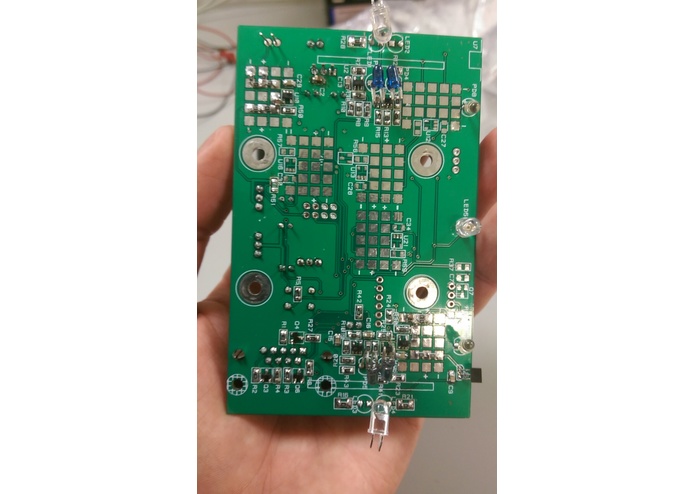
Scroll through images for schematics
-
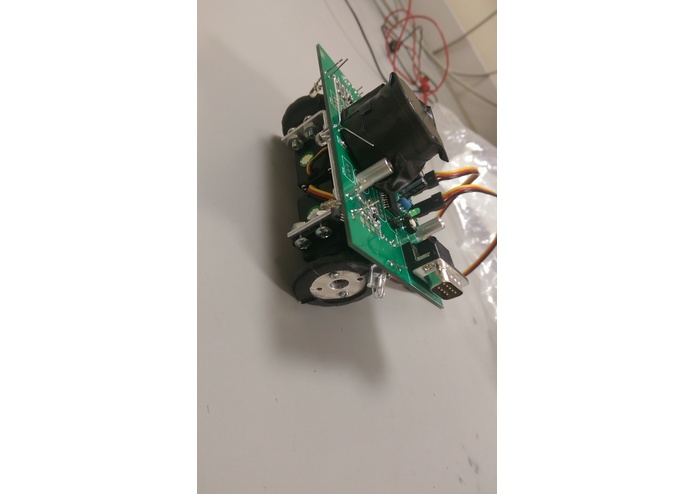
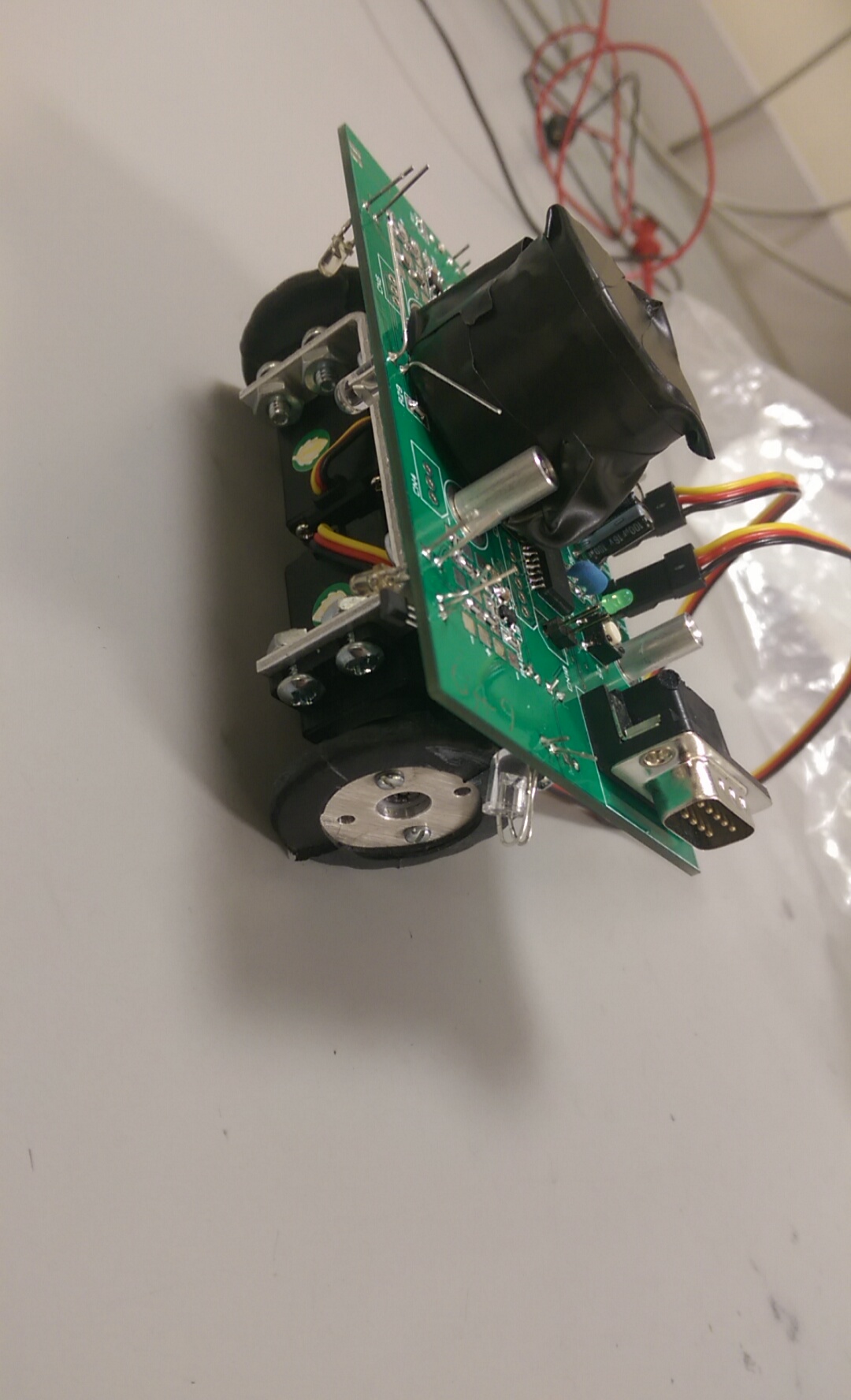
Bob the robot with his shoes on
-
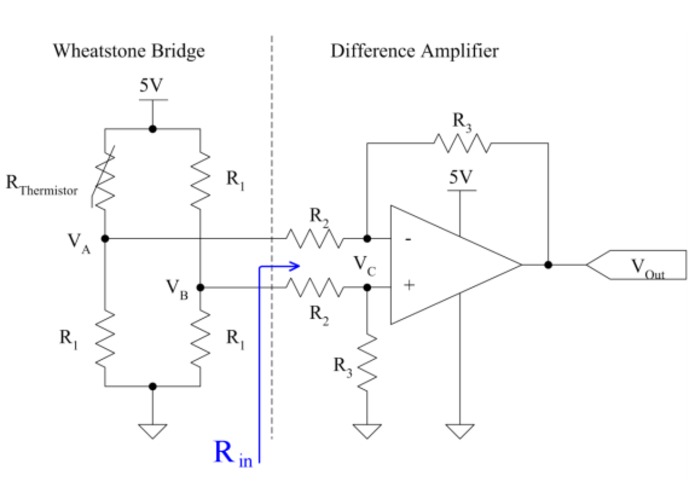
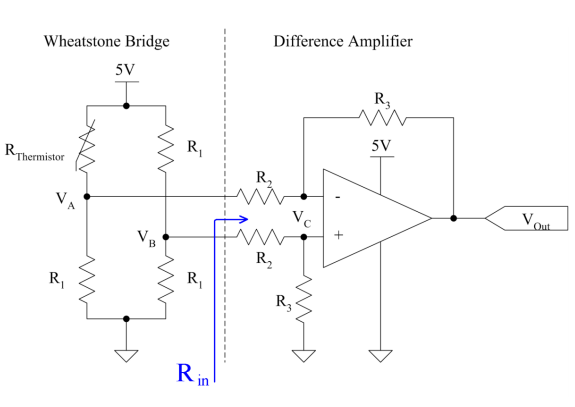
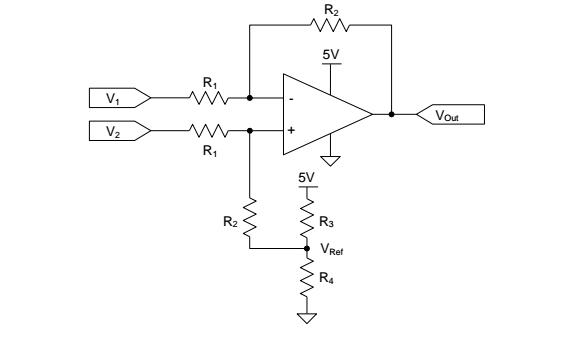
Thermistor in a Wheatstone Bridge configuration with a difference amplifier
-
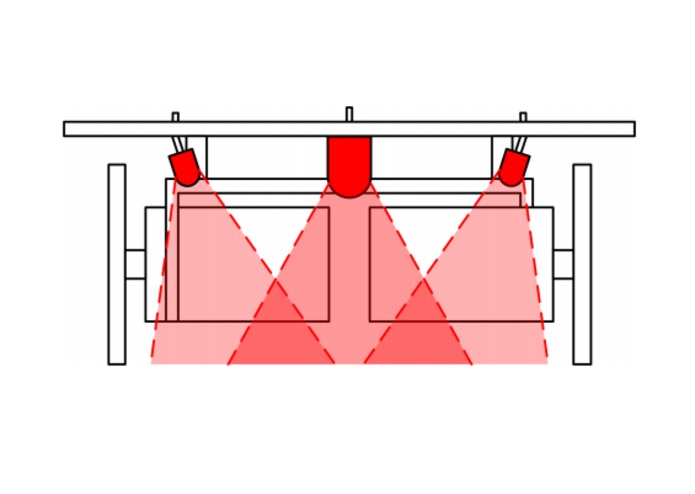
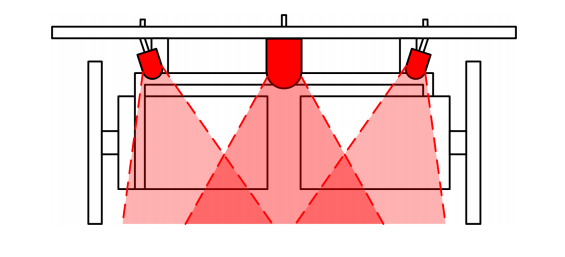
Infrared line-sensing system
-
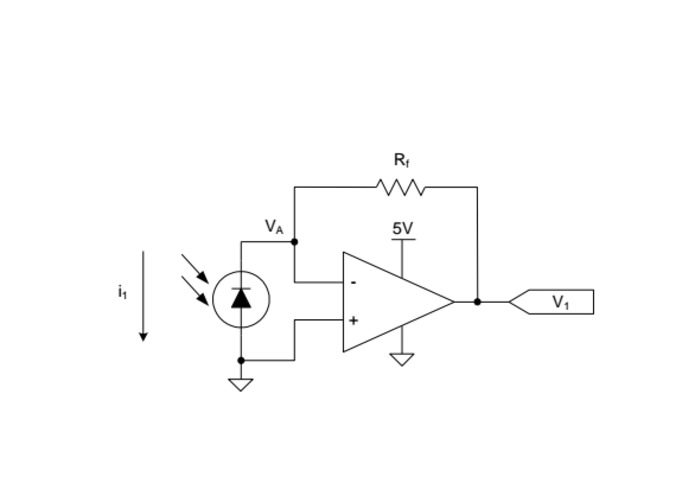
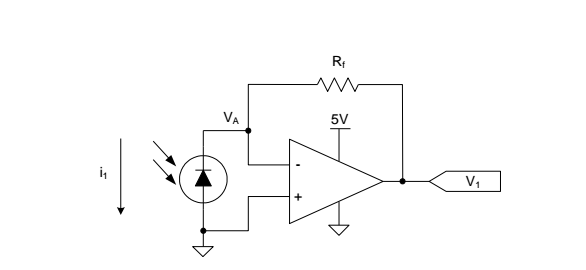
Current to voltage circuit for sensing motors
-
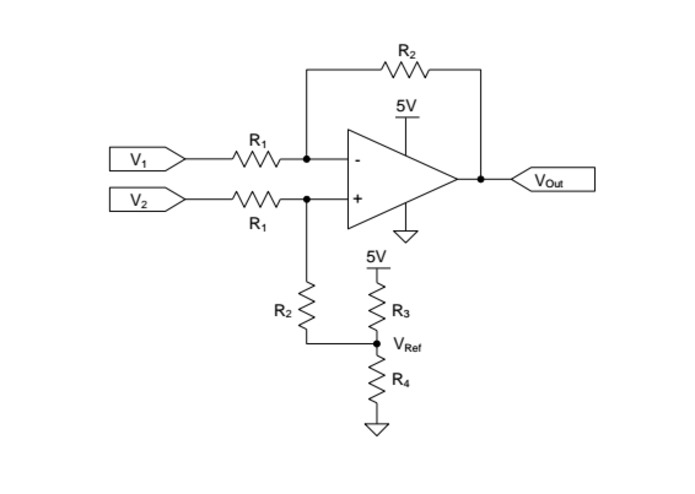
Difference amp for line-sensing infrared sensors
-
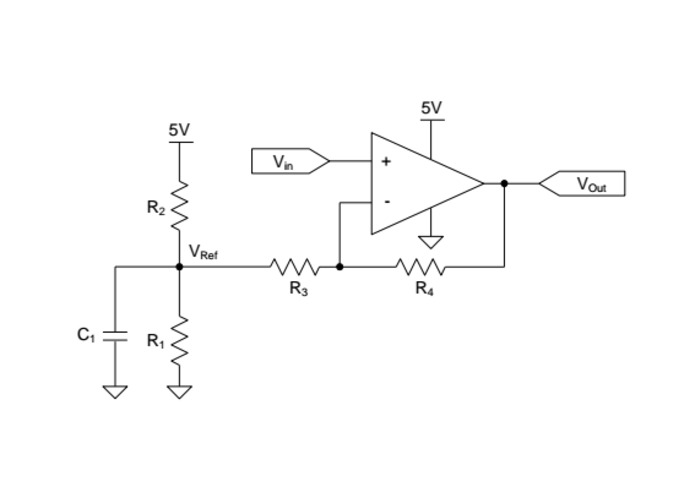
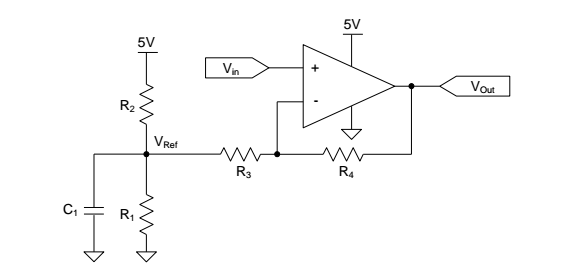
Non-inverting amplifier with non-zero reference voltage for hall effect sensor
-
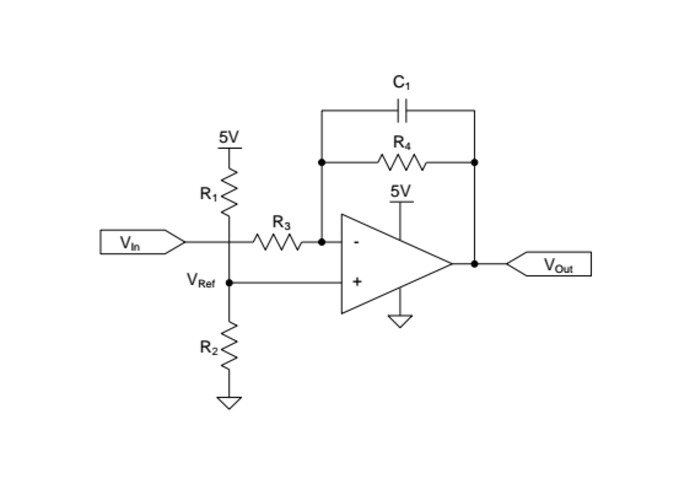
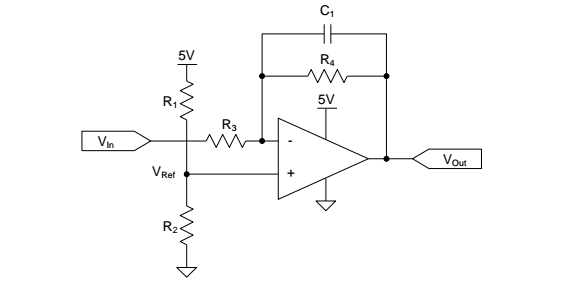
First-order filter for average current measure
Where Bob came from
Bob was created as a project for the course MTE 220: Sensors and Instrumentation. Bob was bred and trained for one purpose; to be the champion of the end of term competition, where robots aim to complete a course in the shortest time possible.
What Bob does
Bob hastily follows a black line, whether it's curved, dotted, or straight. Bob also senses magnetic fields and pauses in its endless line-followimg mission to indicate whether the nearby magnet is exhibiting a north or south magnetic field. Temperature-sensing capability was also implemented to make sure Bob knows whether he's on the right path to the beach or not.
How Bob was built
Bob uses one infrared emitter, two receivers, custom built encoders, a hall effect sensor, a thermistor, and two motors to perform its duties. Various signal conditioning circuits are used for all sensors to make sure the signal they send to the microcontroller will be as clean and accurate as possible.
Challenges I ran into
As with most children, there were several challenges with raising Bob the robot. For one, Bob struggled with microresets. When Bob would start or stop turning his motors, the microcontroller that was provided was not able to handle the sudden spike or drop in current, which resulted in it resetting. This could have been fixed by increasing the size of the precharge capacitor on the board. Instead, a firmware solution was implemented. The motors were gradually powered on and off using firmware, eliminating the issue of microresets. Another problematic area was the custom infrared sensors that monitored where the black line was relative to the motor. The signals were difficult to work with and innaccurate. This was solved using signal conditioning and filtering circuits.
Accomplishments that I'm proud of
Bob the valiant, speedy, brave, daring, galant, and unfairly handsome robot managed to secure the fastest time for the track it competed on during competition. Bob was better than the rest of the less interesting unnamed robots! Our beloved also sensed all the magnets embedded into the track and did not have any issues with resetting the micro. He worked perfectly, leading us to receiving a perfect scoring (100%) for the competition!
What I learned
I learned how to use signal conditioning circuits to give effective input to the microcontroller. I also learned how to process and make use of the input in an efficient way and
Built With
- electrical-theory
- signal-conditioning-circuits
- wizardry

Log in or sign up for Devpost to join the conversation.