-
-

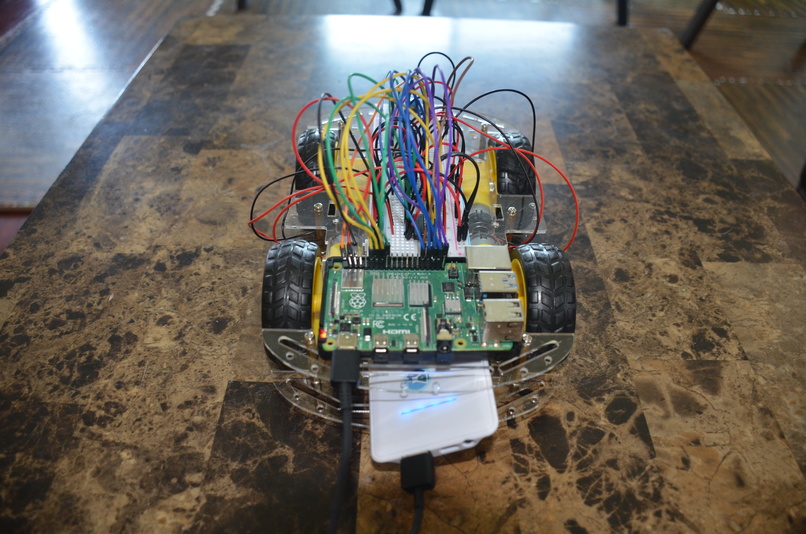
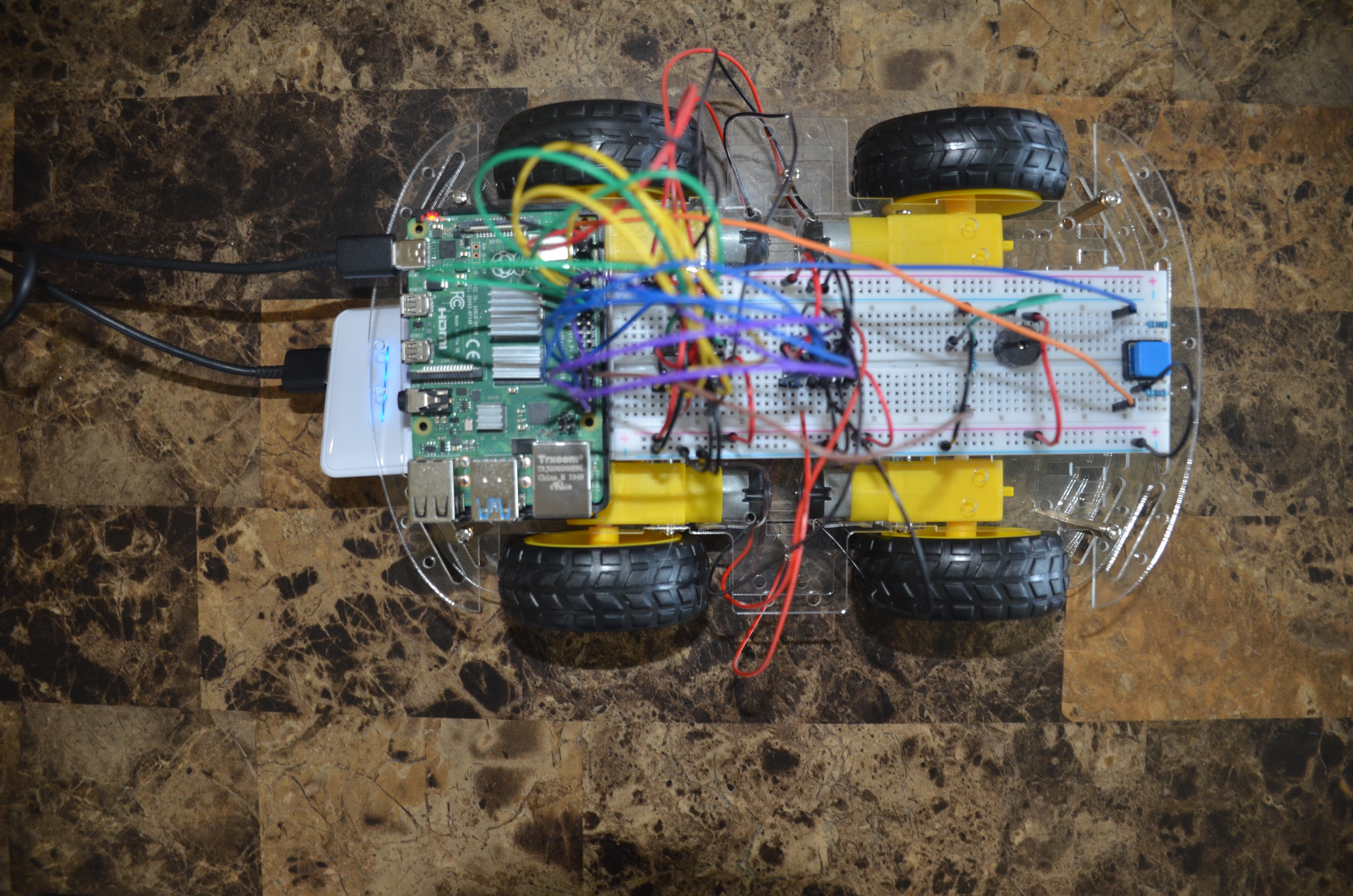
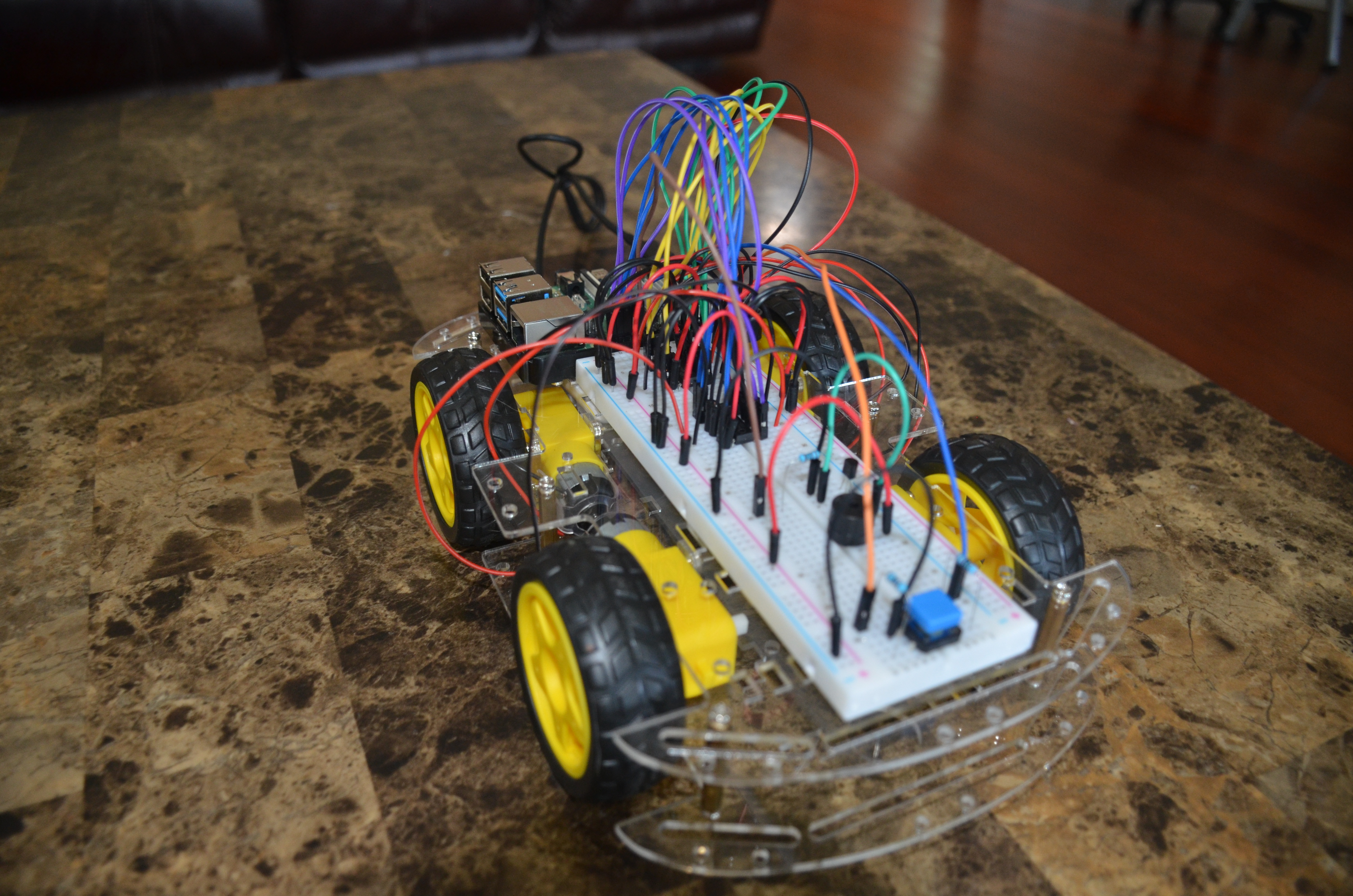
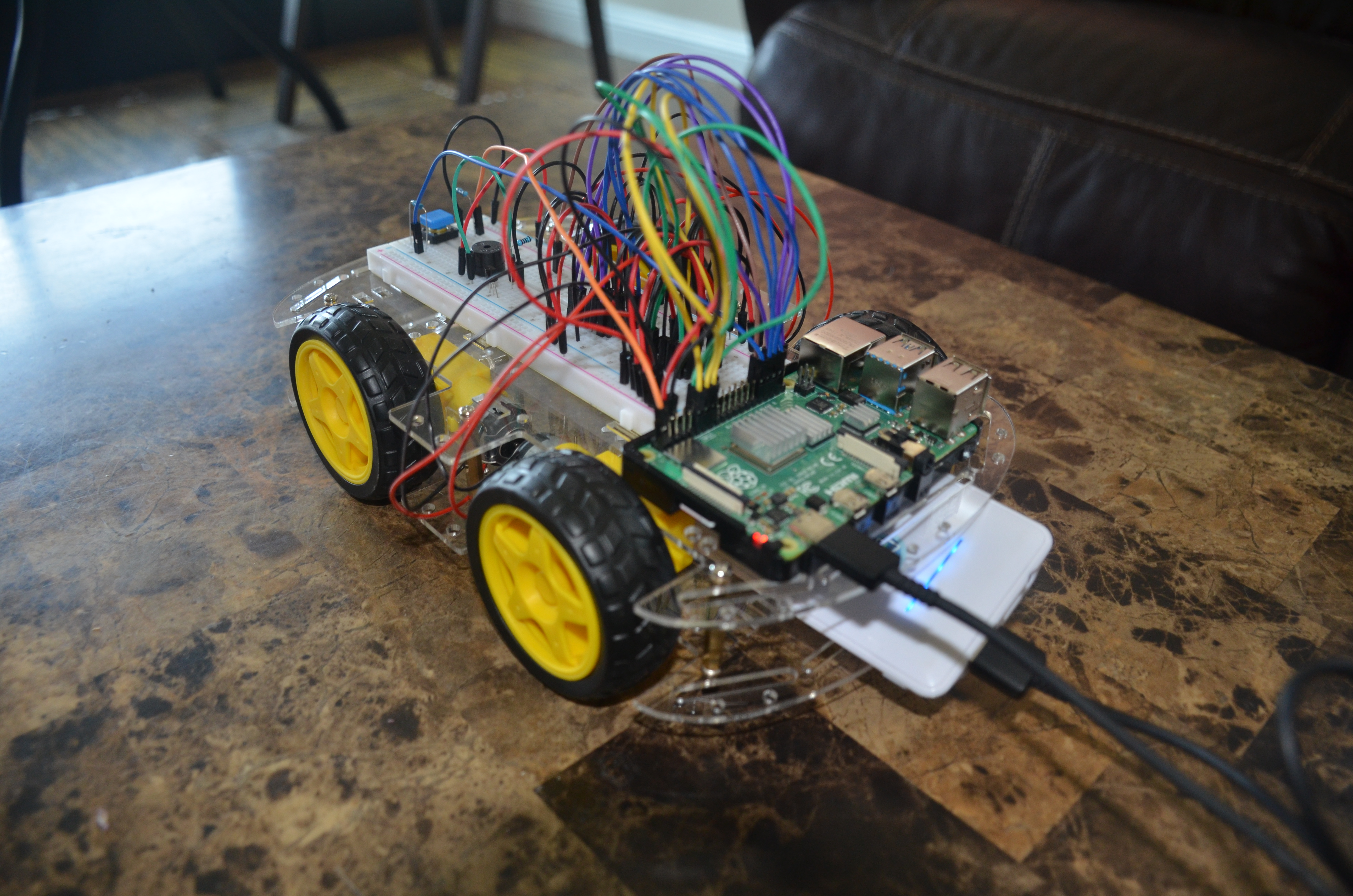
Top View
-
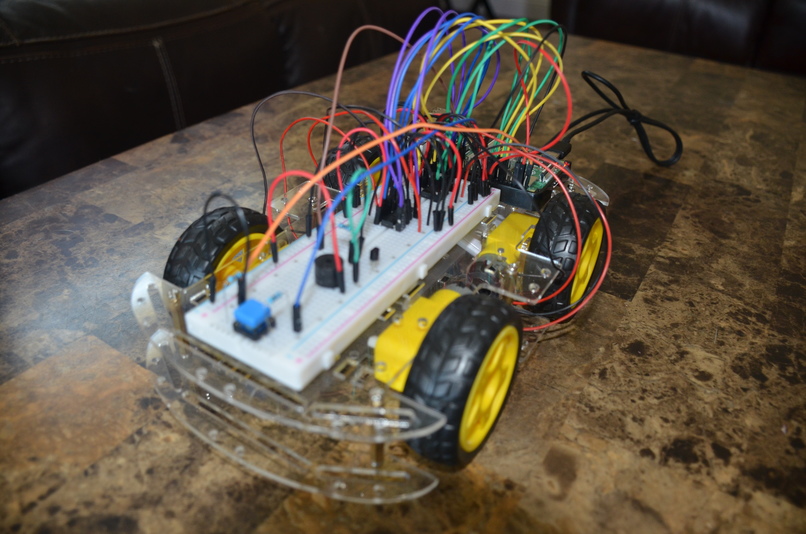
Back View
-
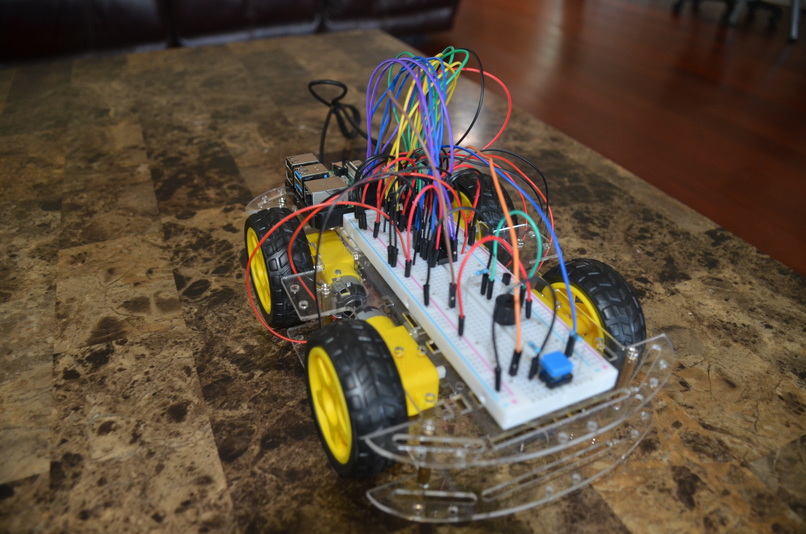
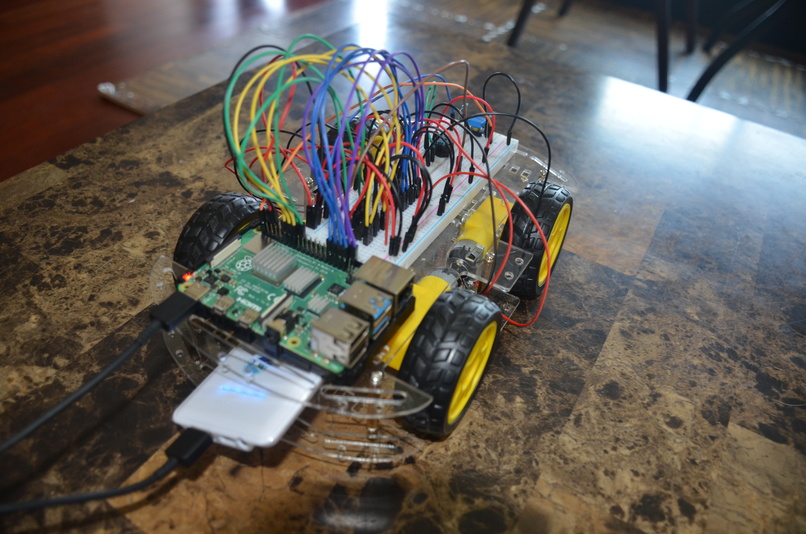
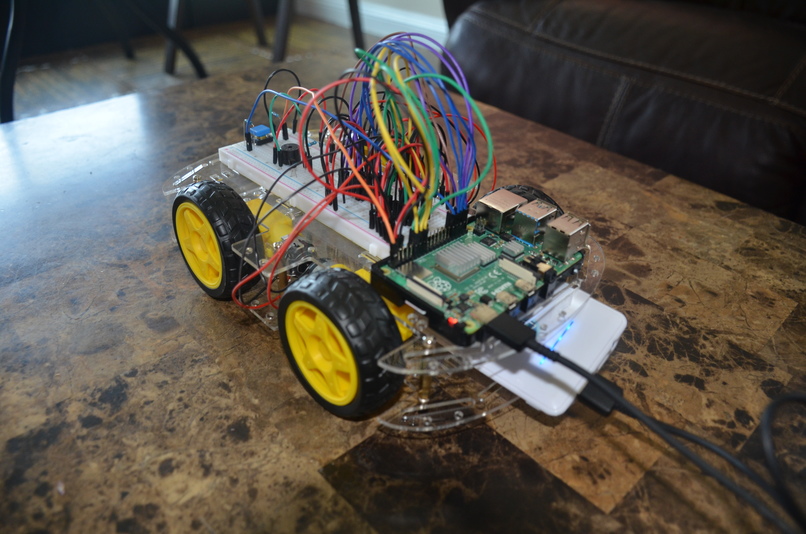
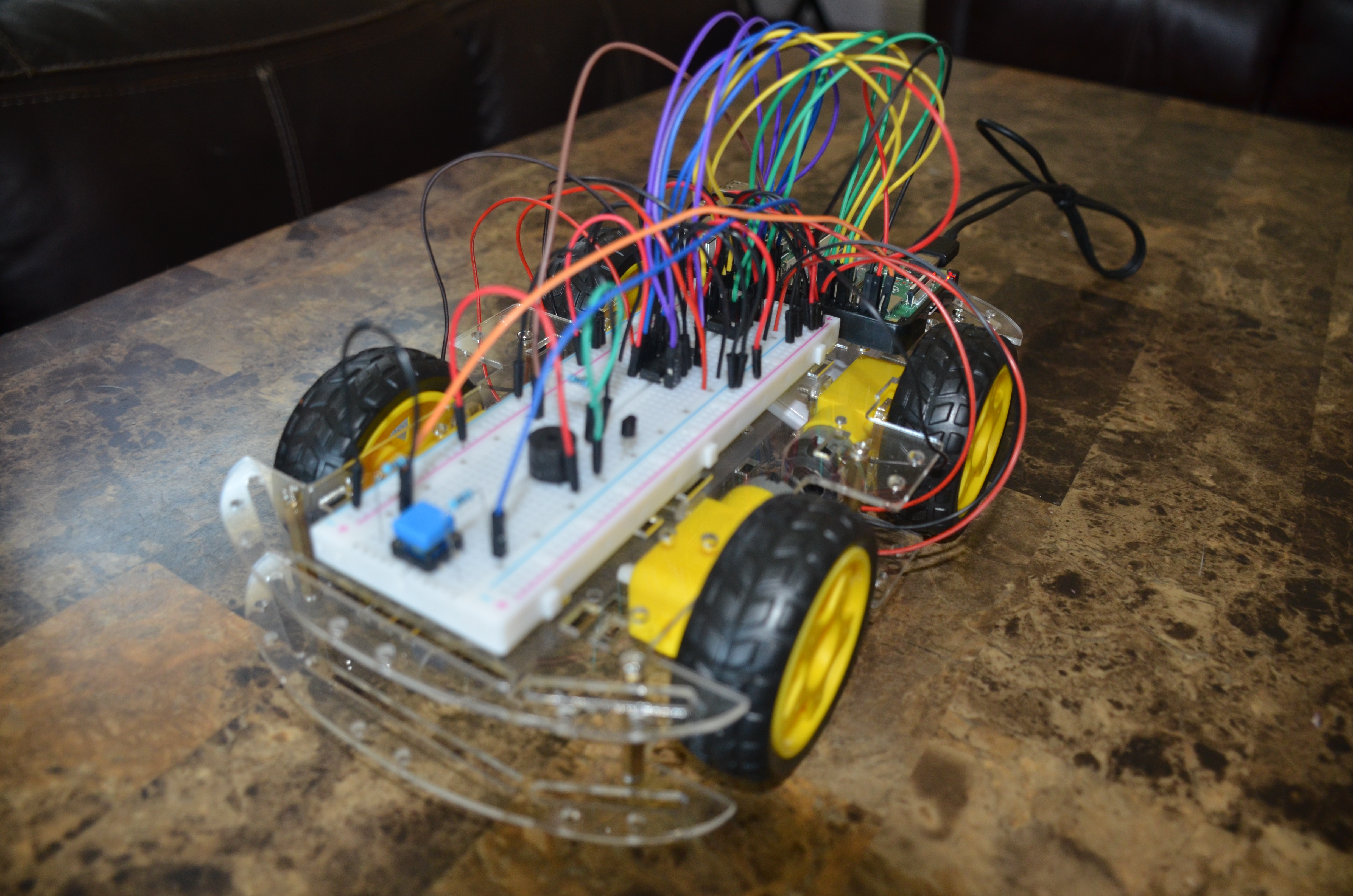
Front-Right View
-
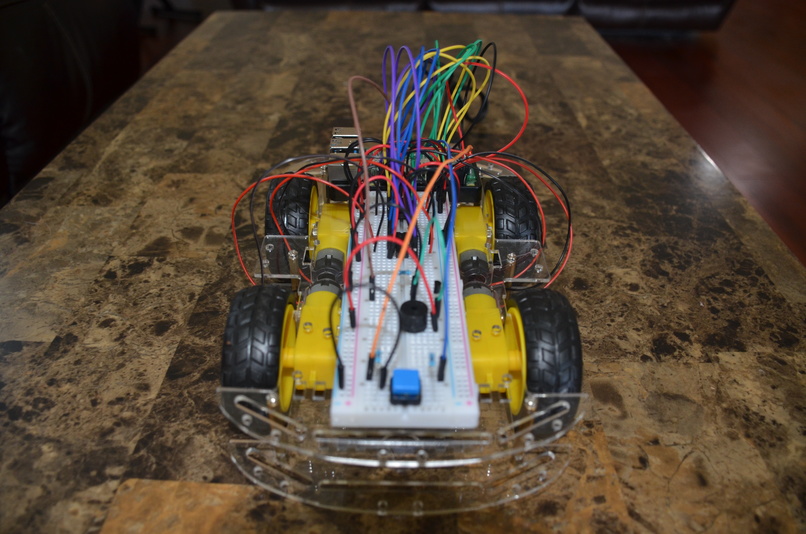
Front View
-
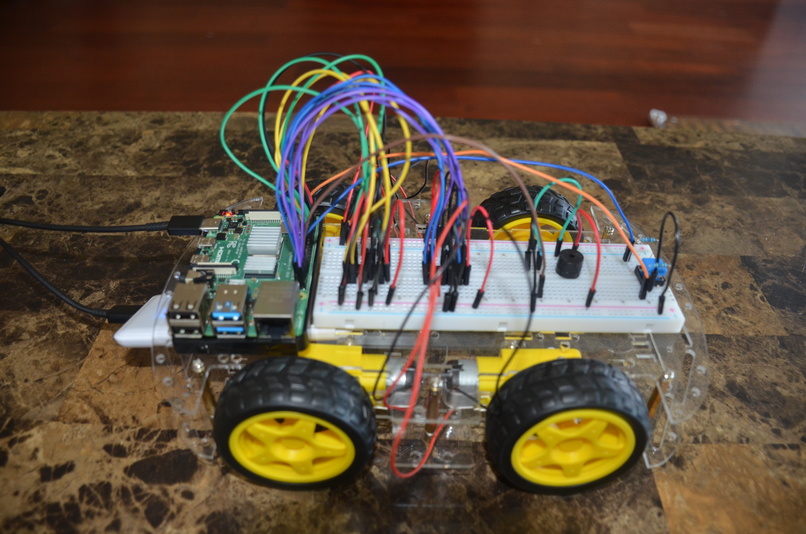
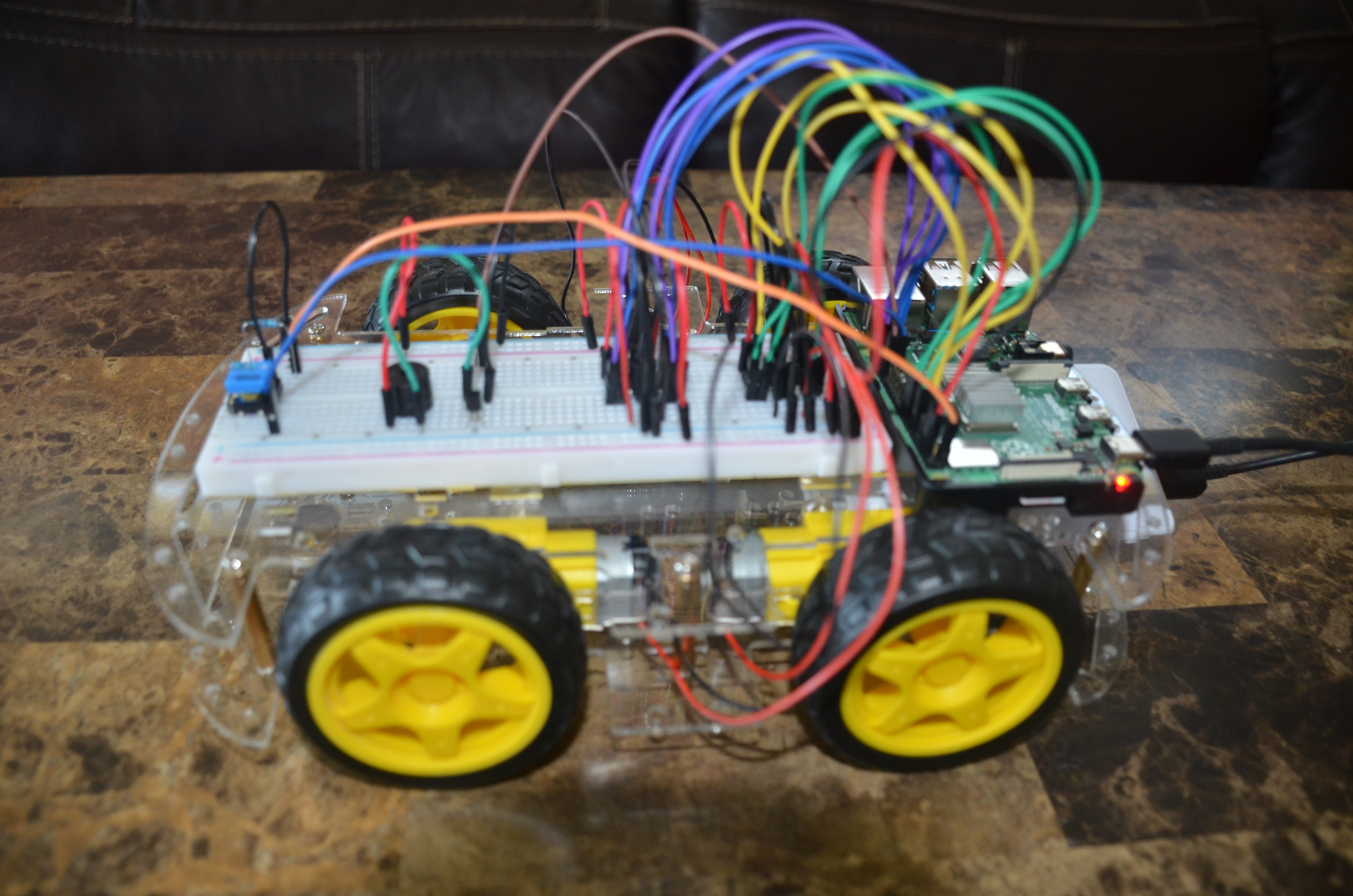
Right View
-
Back-Right View
-
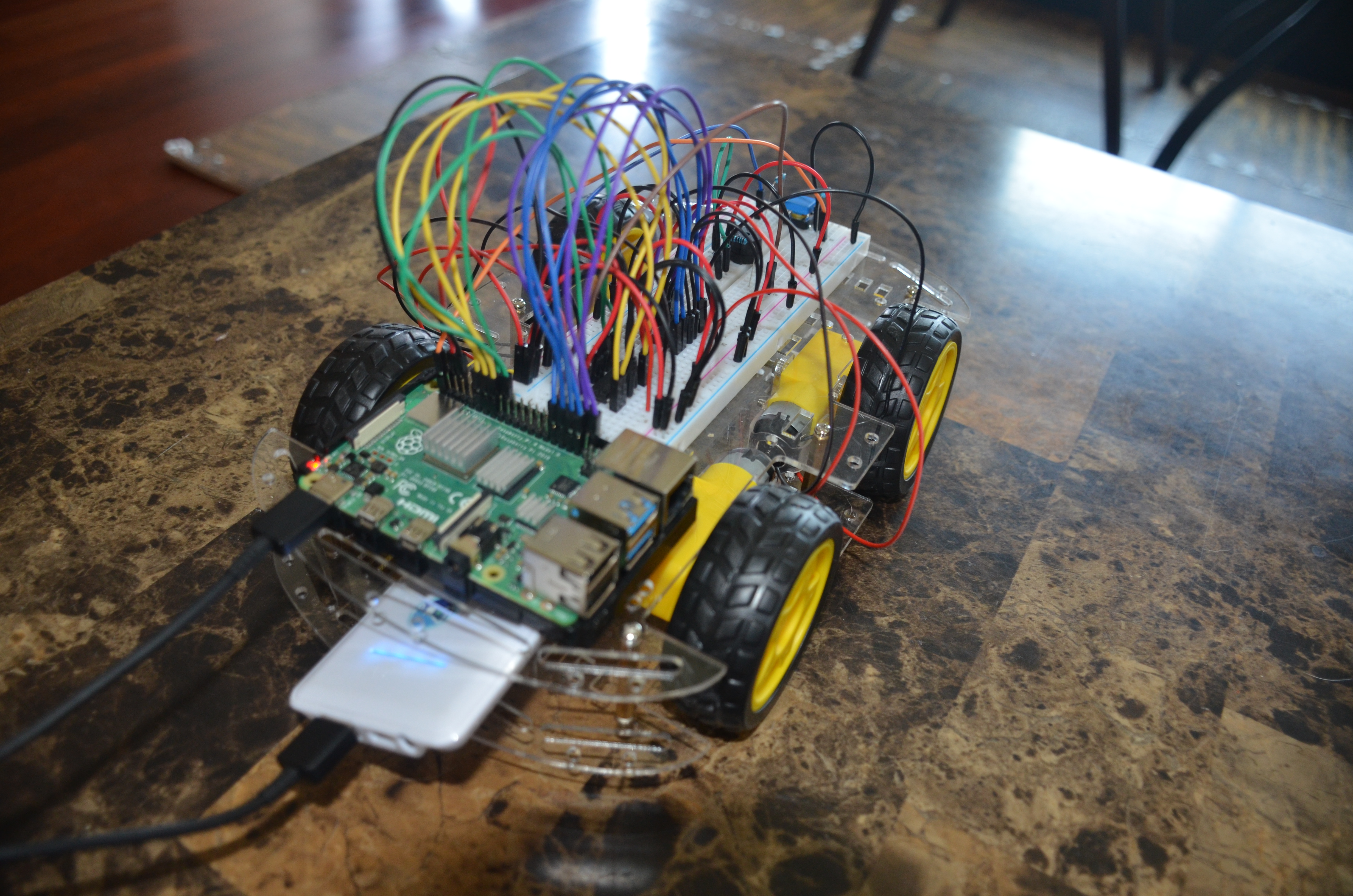
Front-Left View
-
Back-Left View
-

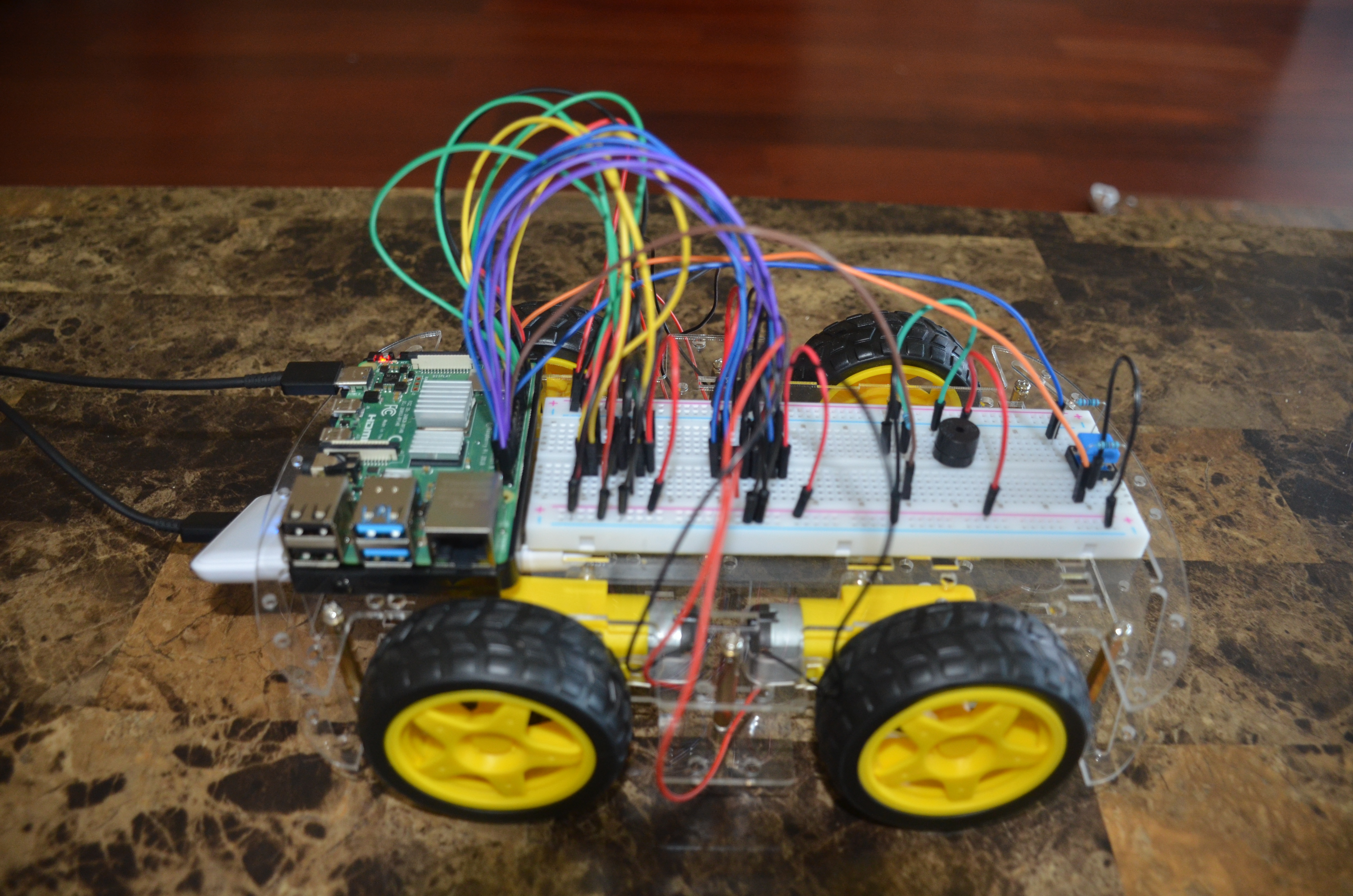
Left-View


Inspiration
I love using the Raspberry Pi to make many different kinds of projects. I have made many kinds of projects in which I controlled them using a keypad, joystick, or push buttons. I wanted to create a project that I could control wirelessly. This inspired me to create a car which I could control wirelessly via bluetooth.
What it does
The bluetooth controlled car that I have made acts like any other remote controlled car, however, it can be controlled with any smart phone.
How I built it
To build my bluetooth controlled car, I used a Raspberry Pi which I coded using Python. I used 4 DC Gear Motors to move the car. To steer and drive the motors, I used 2 l293d motor drivers. After connecting the DC Motors to the wheels, I connected a push button and active buzzer to the breadboard. To connect any smartphone to the Raspberry Pi, the user must first install the Serial Bluetooth Terminal App. Then he should choose "raspberry pi" from the "Devices" Menu. However, to establish a successful connection between the Raspberry Pi and smart phone, the user must also hold onto the push button while connecting both devices. After the user's phone is connected to the car, the active buzzer will beep indicating that it is connected. The Raspberry Pi will send directions to control the car to the user's smartphone. To watch my video for this project, click the link here. If you want the code for this project, check it out here.
Challenges I ran into
A big challenge that I ran into was connecting my phone to my car and sending data back and forth. The problem was that my Raspberry Pi didn't use its hci0 to listen to my phone. To make that work, I had to do a little configuration to the hci0 for my Raspberry Pi. If you run into this problem as well, then you can check out this video here.
Accomplishments that I'm proud of
In this project, I am proud to have created my own remote controlled car which anyone's smart phone. Ever since I started working with the Raspberry Pi, I've been waiting for a remote controlled car of my own and thanks to this hackathon, I also had a motivation to make this car. Now that I have created a car, there are many other things that I could do with it. I could create a mopping bot, vacuum bot, or many other kinds of robots, because all of them need to move!
What I learned
In this project, I learned a little bit about networking and how bluetooth works. I also learned about how to use bluetooth with Python to send and receive data. As far as it goes for the Raspberry Pi, I learned how to control DC Motors and I was able to understand the functionality of a transistor.
What's next for Bluetooth Controlled RC Car
I intend to improve my Bluetooth Car by adding a camera. The camera will provide live feed on a live flask server. I also think that it would be necessary to include a distance sensor. This way, if the car is about to crash into something, then the distance sensor can sense it prior to the car crashing, and make the car stop by itself. Perhaps, I might even make the car controlled from the flask website that also provides live camera feed.

Log in or sign up for Devpost to join the conversation.