
We were inspired by the Robo-dog that was taking the world by storm, with its quadruped shape and its complex systems that allowed its legs to move rapidly and fluidly.
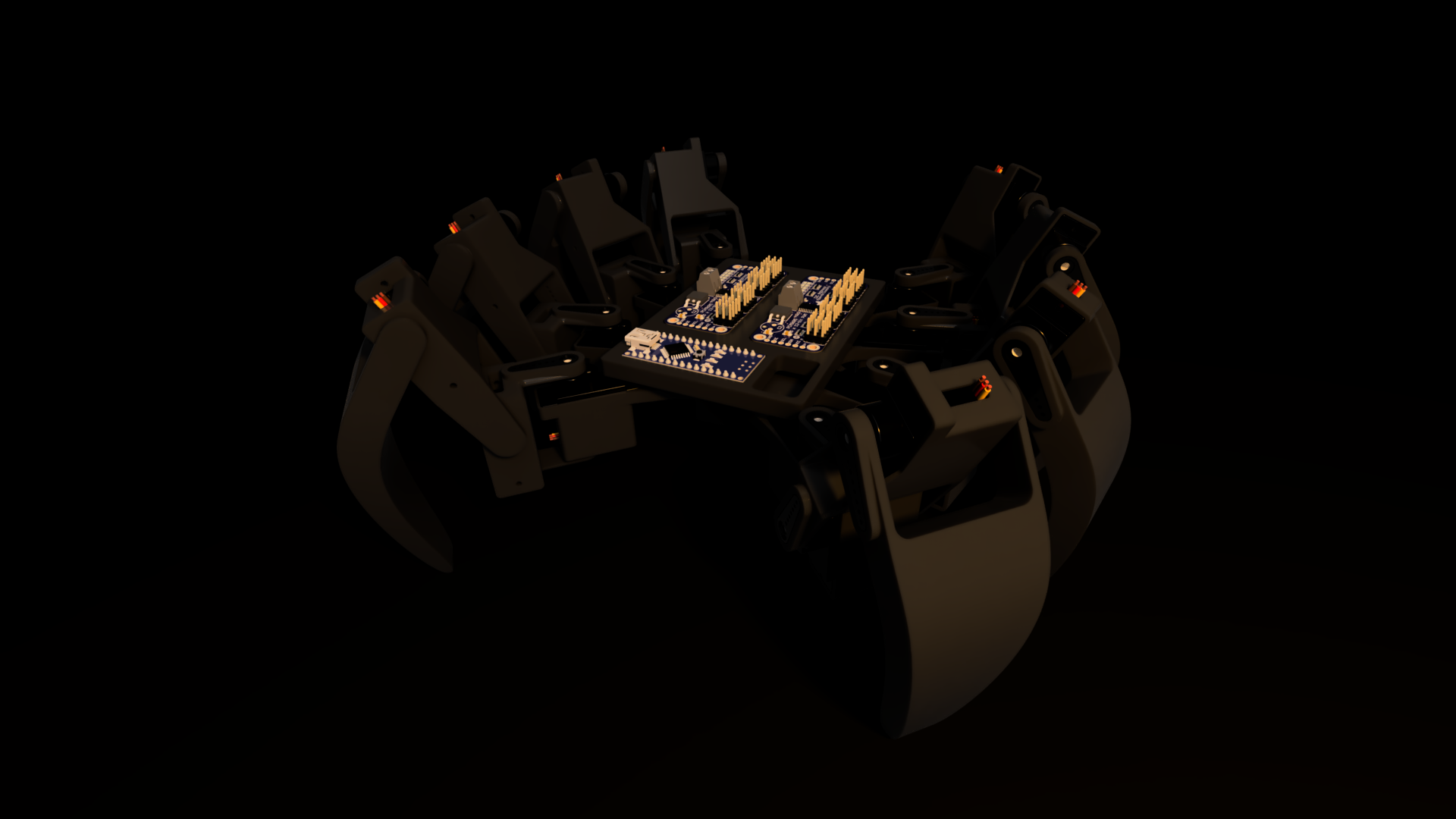
It is an eight-legged animatronic that is able to move around and grab objects for you, scare off your friends, and even pick up things from the ground.
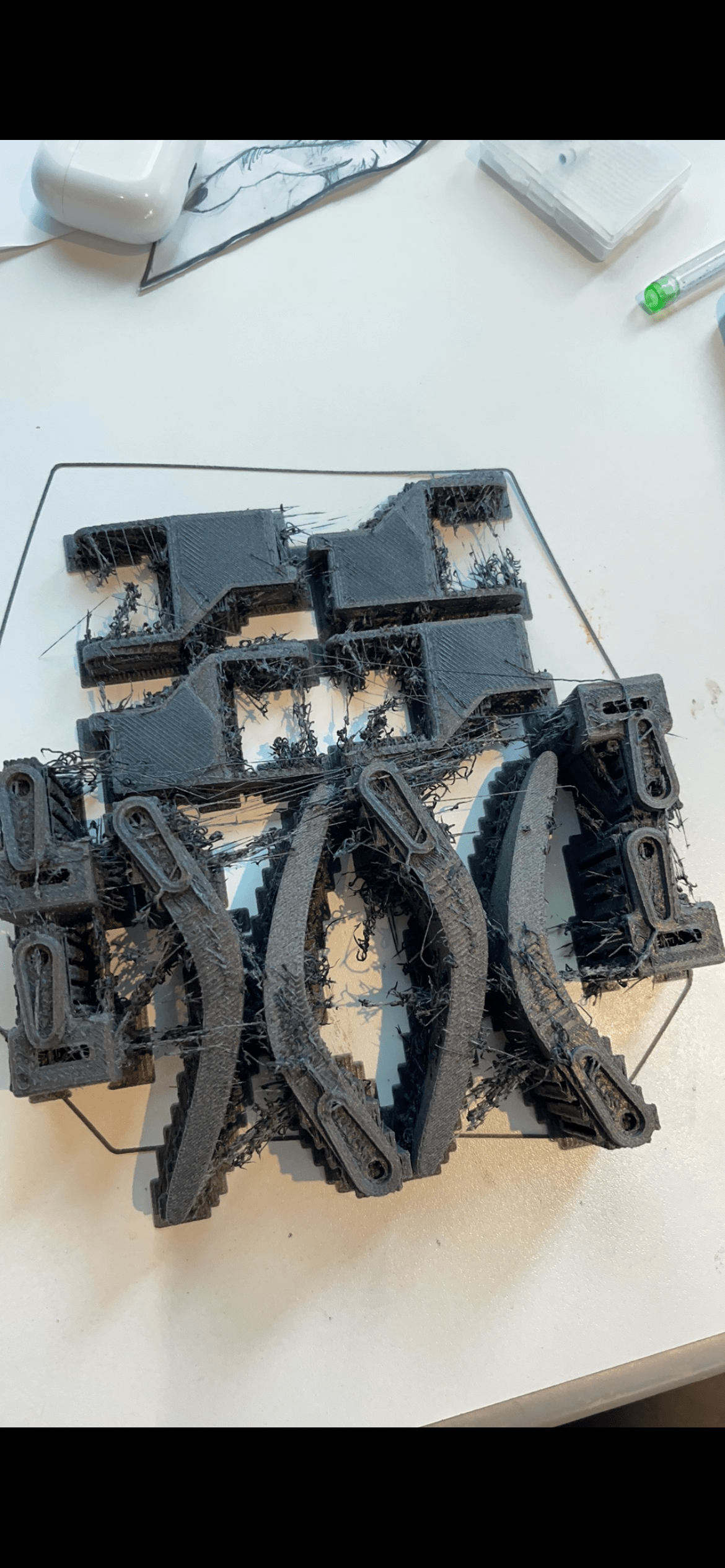
It was built with parts that were 3D printed from Nylon Carbon Fiber, and they were then combined with two Adafruit servo I2C Modules and an Arduino Nano. They were then programmed using techniques from inverse kinematics to determine optimal movements to reach certain points in space.
The largest challenge that we faced was the programming. Due to the very large amount of servo motors, it made it so that ordinary programming techniques would not be able to be used. This caused numerous problems later as more power led to more weight, which led to more complex equations being used to calculate the movement of the robot.
The biggest thing we learned that there is no such thing as true reliability in a hardware project. There are always some things waiting to go wrong, and you will have no choice but to stay resilient and solve the problems accordingly.
We hope that in the future, we will be able to implement more algorithms into Black Widow to make it now of the animatronics with the most complex movement in the world. Our next step includes using gyroscopic properties and a counterweight characteristic to create an "cat-falling" effect, which the robot will always be able to land on its feet.
Built With
- 3dprinting
- adafruit
- arduino
- cad
- nano



Log in or sign up for Devpost to join the conversation.