Groove with the Bitwise Boogie! The dancing robot will wow you with its electrifying moves. Dance along and enjoy this October afternoon with the BOOlean Bud.
Inspiration: Zentas Hexapods, also Dancing Robot. Who doesn't like that
What it does: It dances, and brings joy!
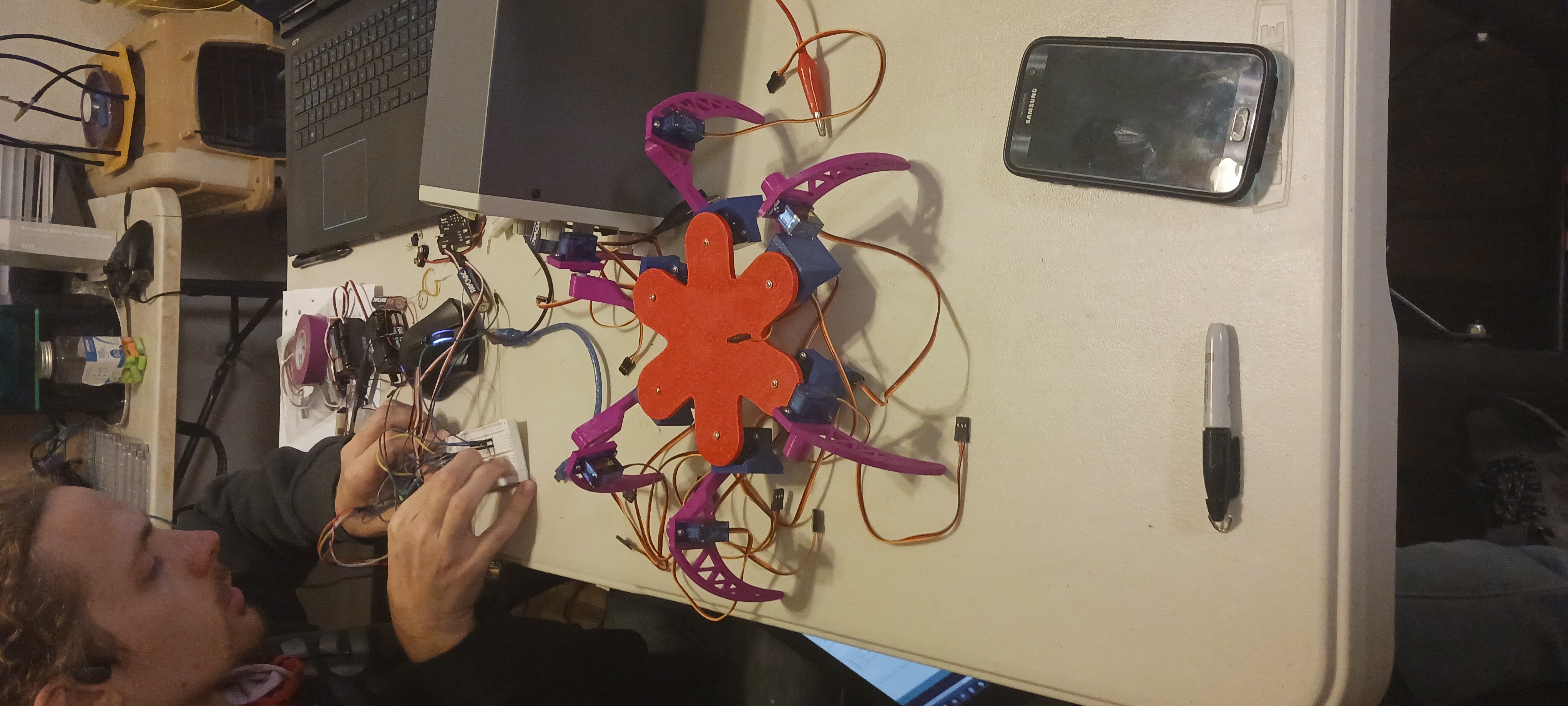
How we built it: We created a 3D printed body and used servo motors, servo motor controllers, and an Arduino nano.
Challenges we ran into: inverse and forward kinematics proved very difficult to resolve. Multiplexing 18 servos to a single microcontroller, the Arduino Nano.
Accomplishments that we're proud of: Great frame design and cad profiles. Our ability to on the fly learn how to use PWM for 18 servos at the same time and by hand beginning the calculations for RRR inverse kinematics.
What we learned: A lot about PWM and Inverse Kinematics as well as controlling multiple servos. Using PETG in swift additive manufacturing.
What's next for Bitwise Boogie: Refining the inverse kinematics and performing much more complex movements and operations.


Log in or sign up for Devpost to join the conversation.