
Inspiration: It all started when we were working on a project where we were soldering ton of boards and moving all around the table for grabbing tools for designing the robot and adjusting the lamp for perfect brightness on the parts where we needed our focus. Hence we came up with the idea of developing the Lamp which follows your tools
What it does: It captures your tool on click of a button and follows where ever you move your tool.
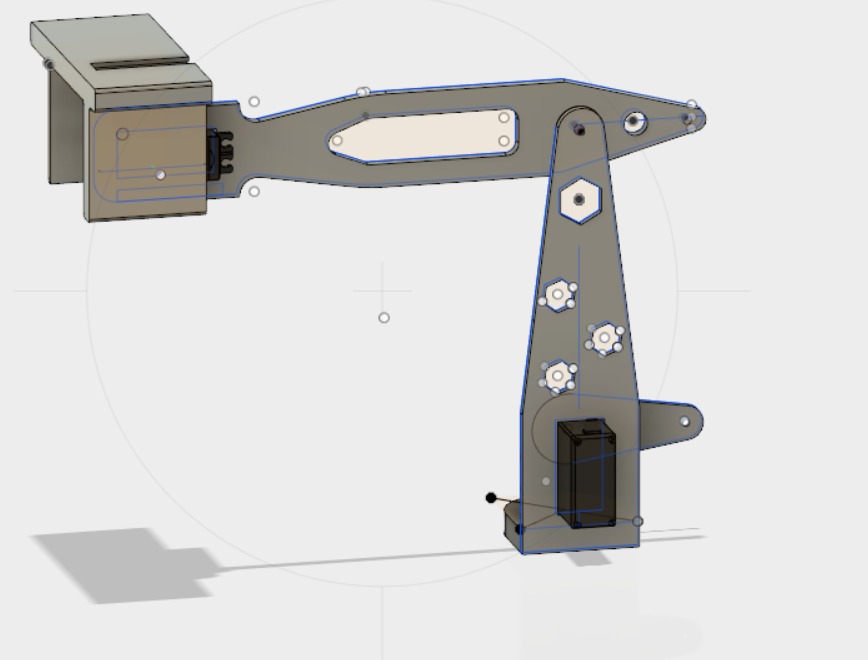
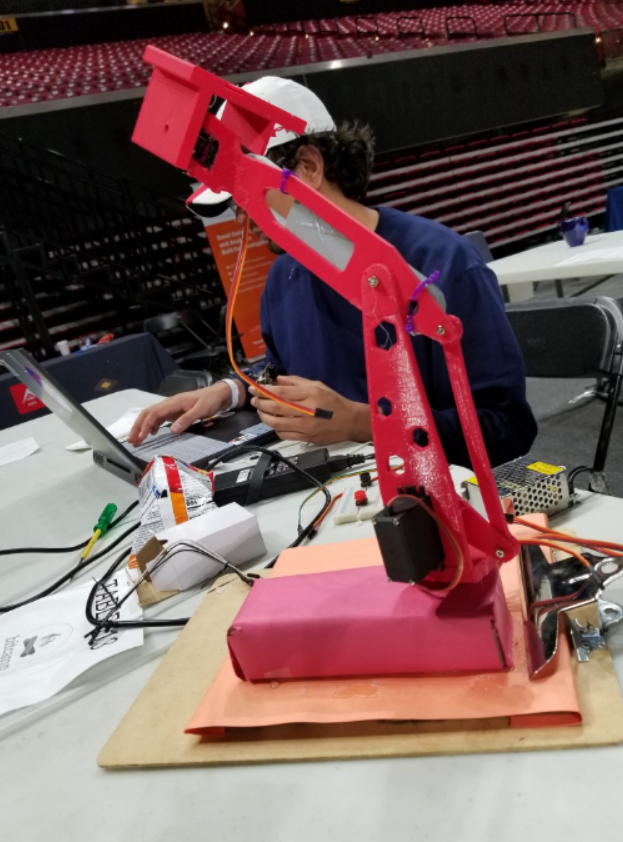
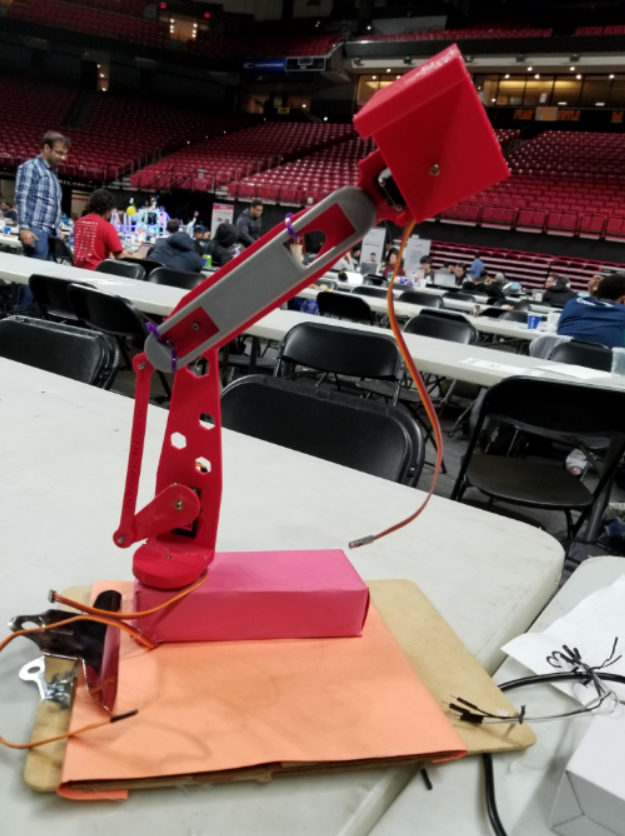
How we built it: We designed and 3d Printed our custom made Lamp as per needs. We are using Raspberry-pi3 for all the computation, we developed our Tool Tracking program, which captures the given tool on a click of a pushbutton and finds the correlation between the object and all the following frames to track the object. Whenever tool reaches the end of frame(boundaries), our Bitlamp calculates the desired rotations needed on each arm/link of the 3DOF using inverse kinematics. Hence our Bitlamp illuminates the our needs
Challenges we ran into:
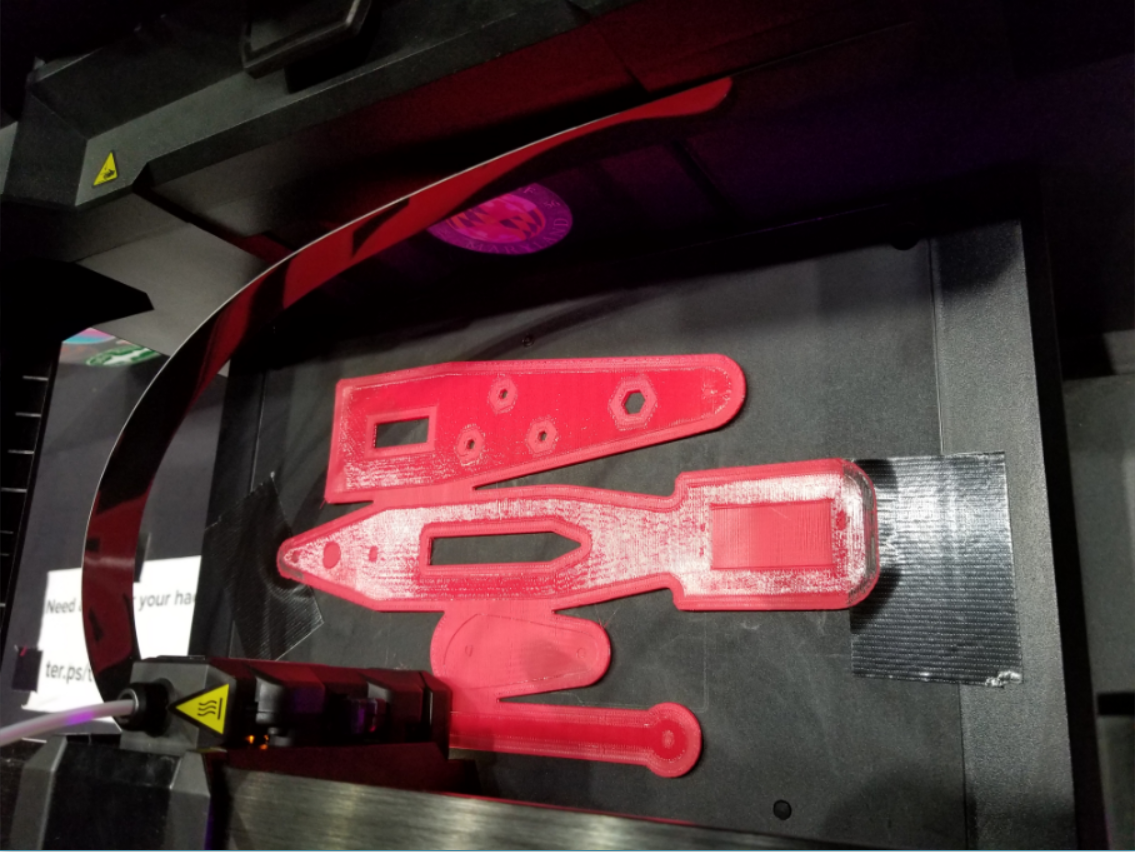
- Reinforcing the 3D printed arms(very bad plastic being used for printing)
- Code which runs smoothly on a laptop doesn't go along well on Raspberry pi3.
- Tracking exact tool with perfect background subtraction.
- Calculation of Inverse Kinematics of 3 DOF arm
Accomplishments that we're proud of:
- Cool custom lamp design
- Perfect Object tracking
- Awesome use of all perception and modeling concepts learned in coursework
What we learned:
- Time management
- Coffee works
- Debugging Raspberry pi3 programs
- Object Detection using python and Open cv libraries
- Configuring various interfaces and using text to speech feature well
What's next for BitLamp
- An improved version of design with better stability [better material]
- Voice Recognition.
- Gesture Recognition.
- Multiple Tools tracking
Built With
- 3dprinting
- opencv
- raspberry-pi
- roboticarms
- robotics



Log in or sign up for Devpost to join the conversation.