-
-
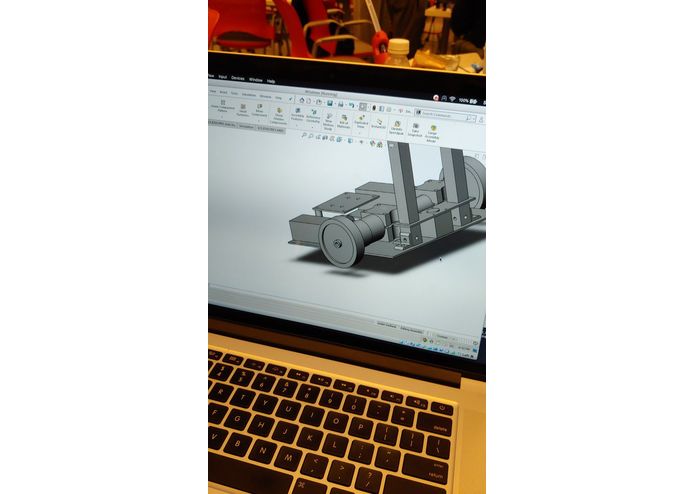
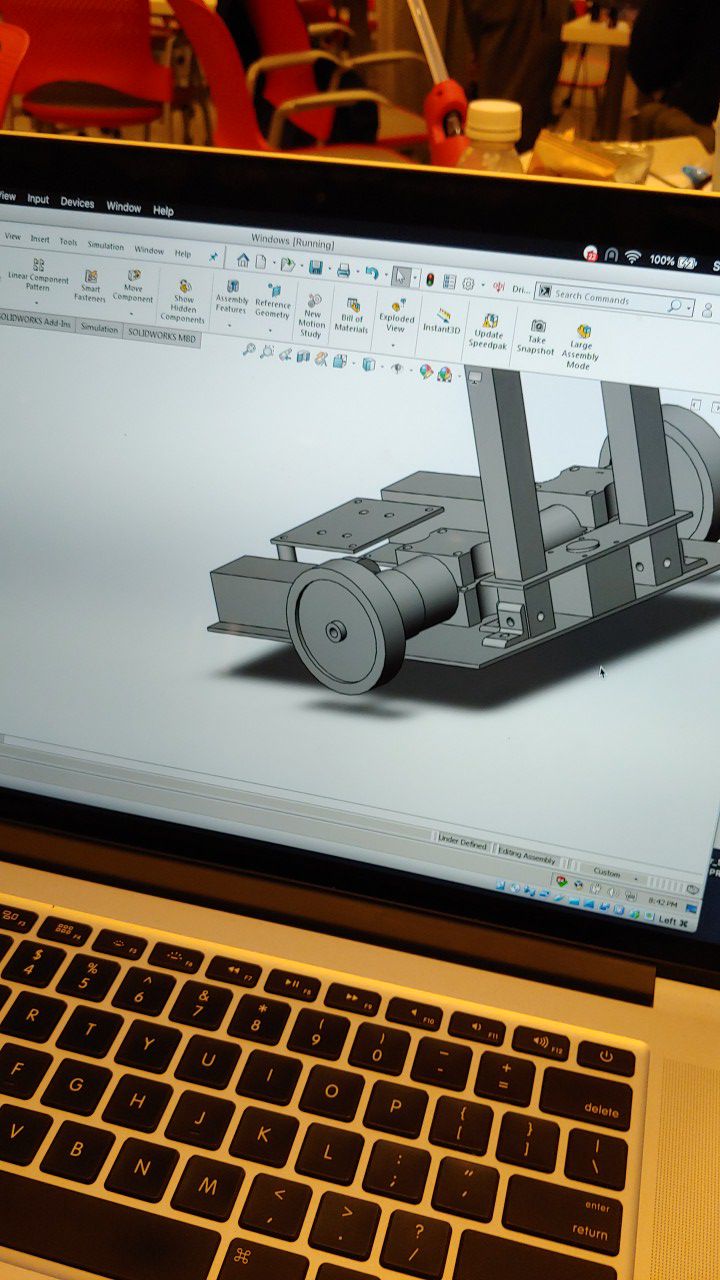
Solidworks assembly of robot drivetrain.
-

Laser cut acrylic and T-nut style construction for the motor mounts, mainly due to a backup on the availible 3D printers.
-

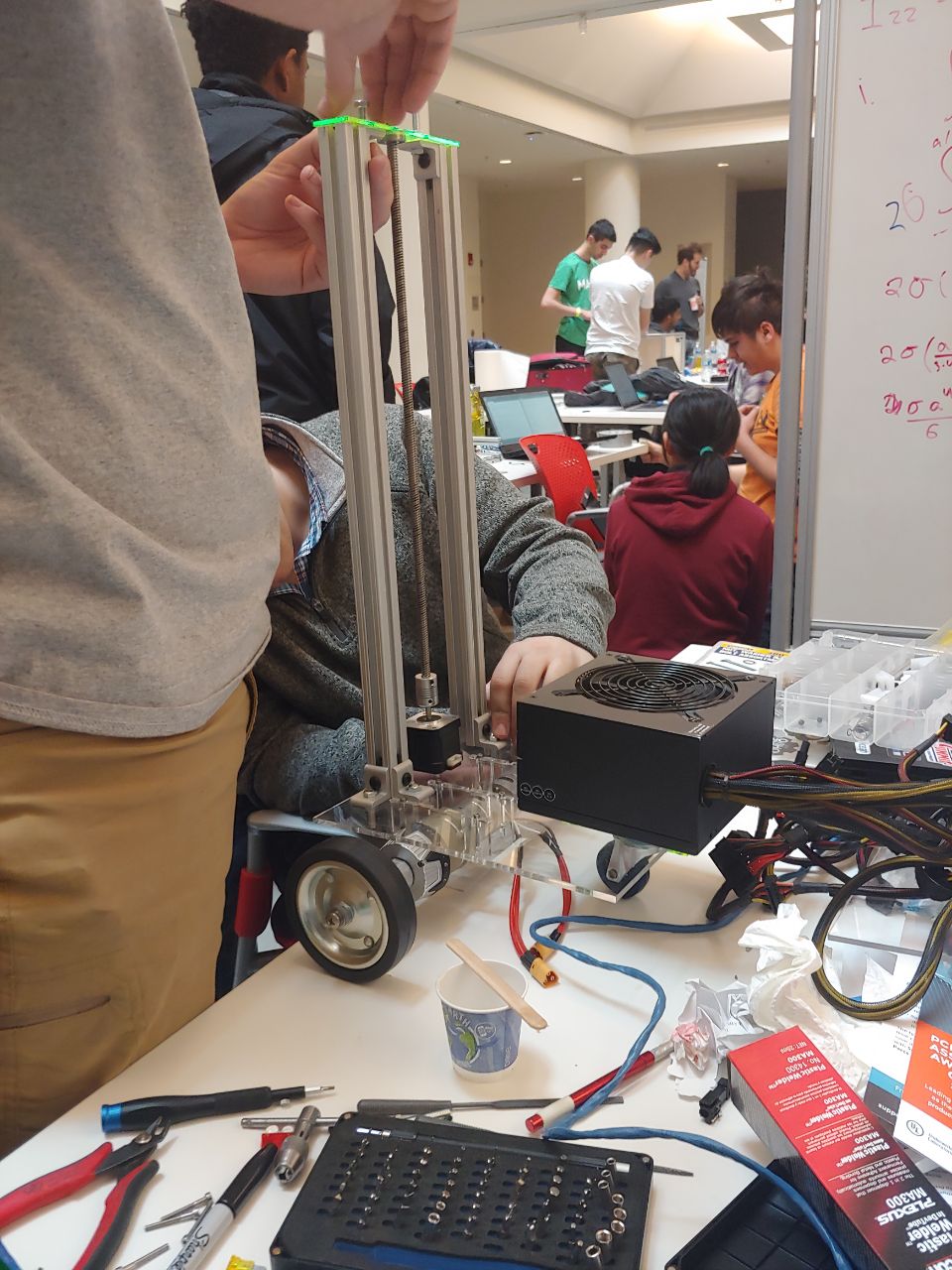
Bottom frame assembly.
-
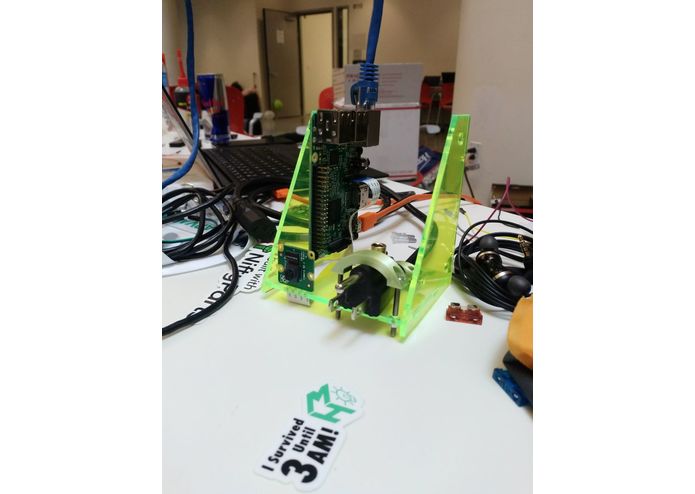
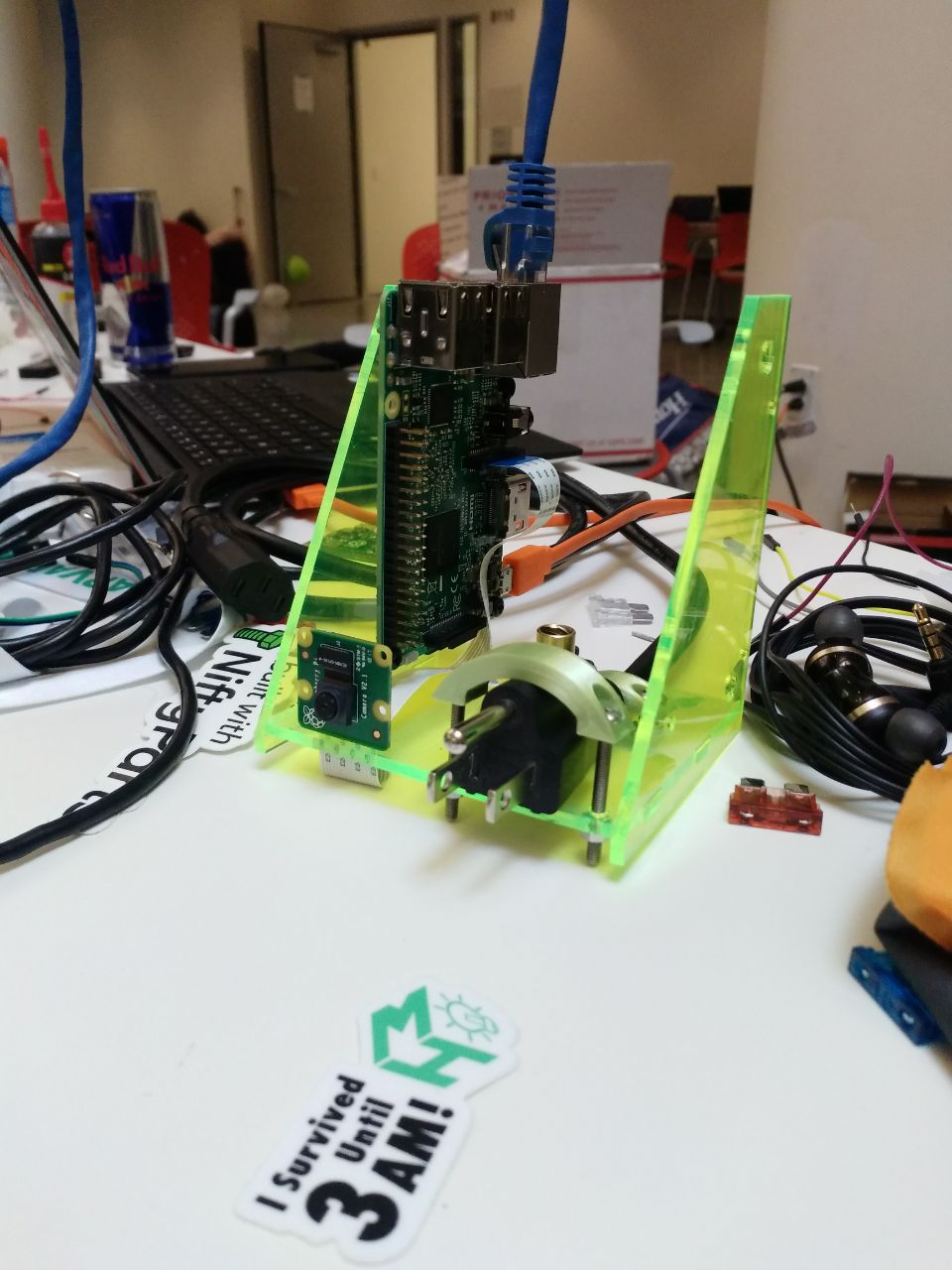
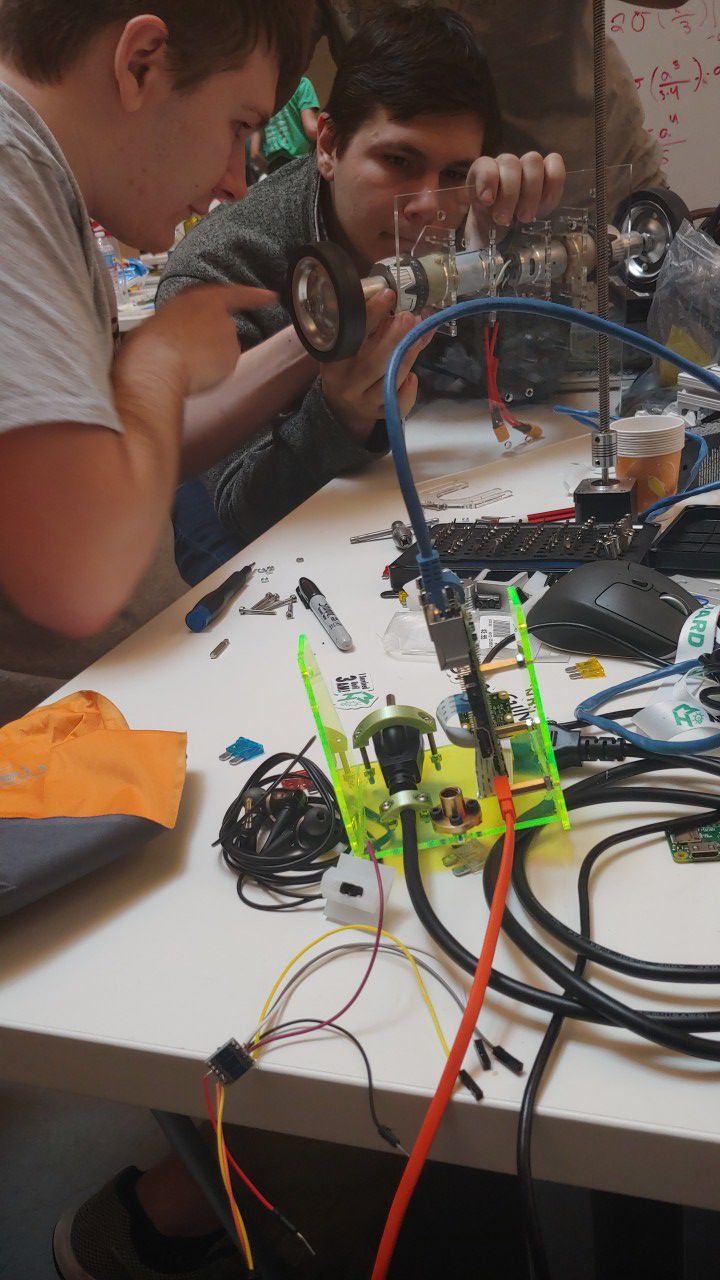
End effector housing a Pi cam and outlet plug.
-

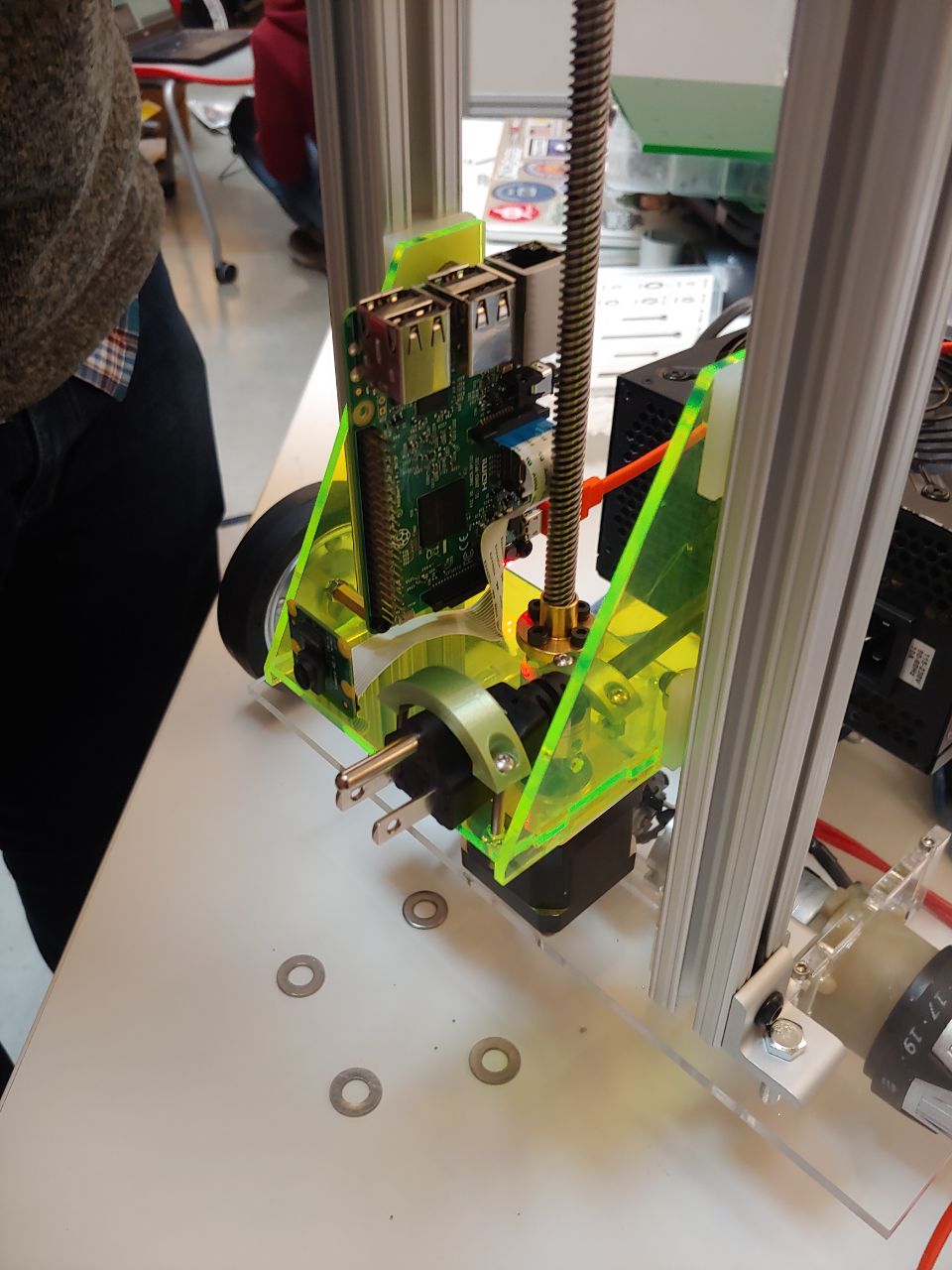
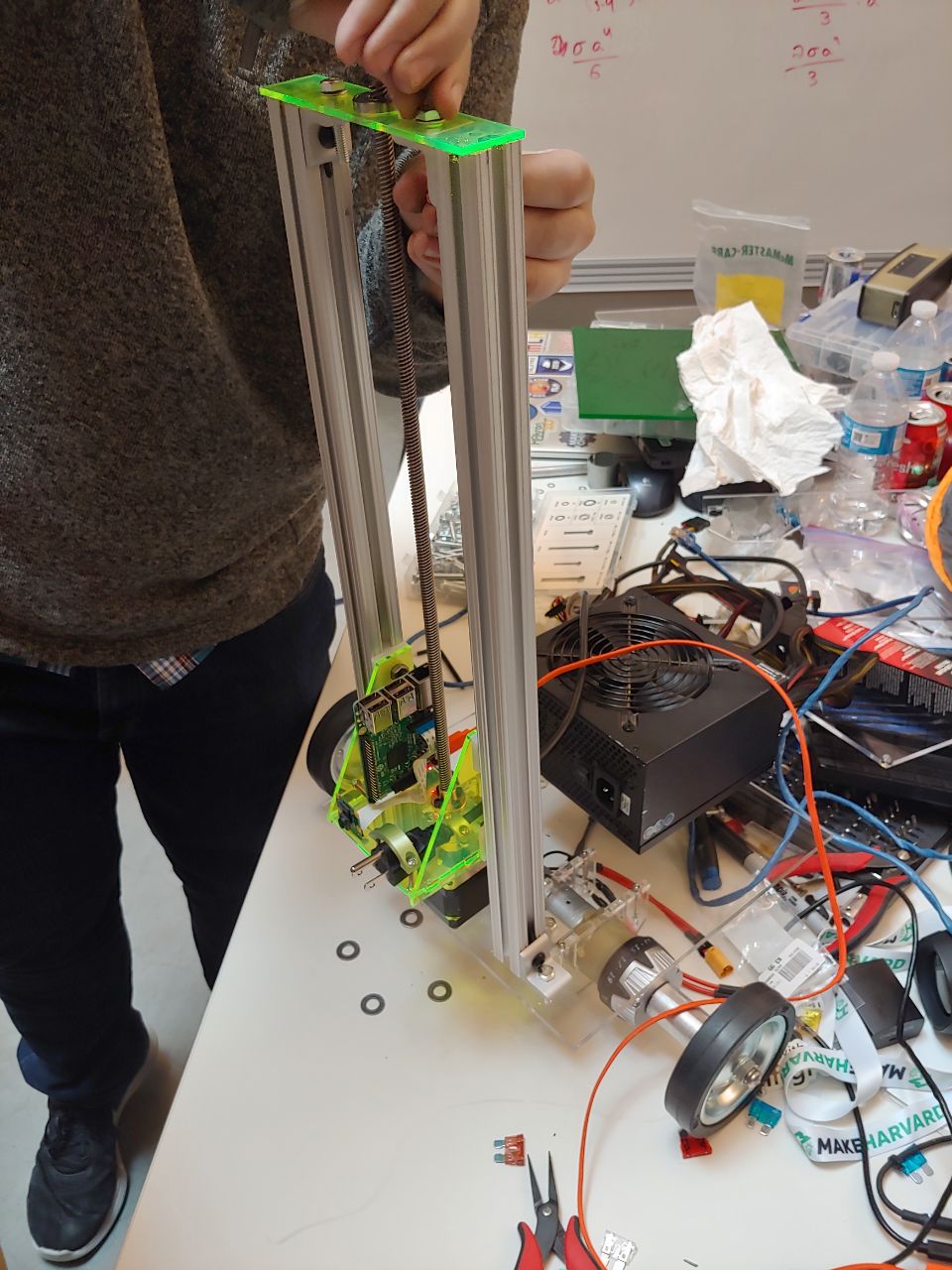
End effector mounted on z-axis lead screw.
-
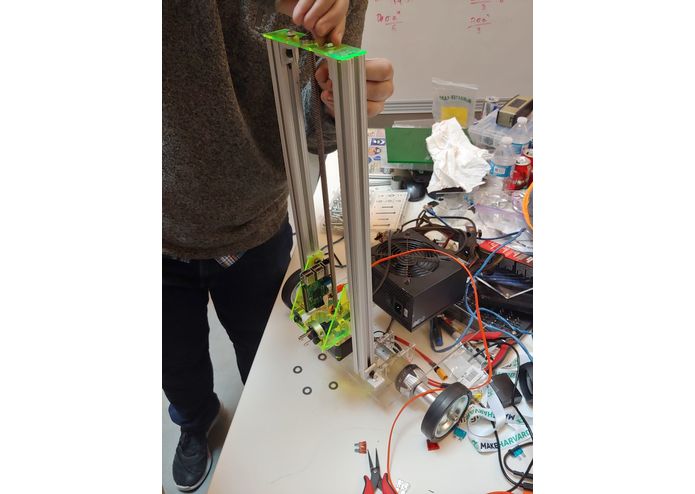
Contstruction of the robot.
-
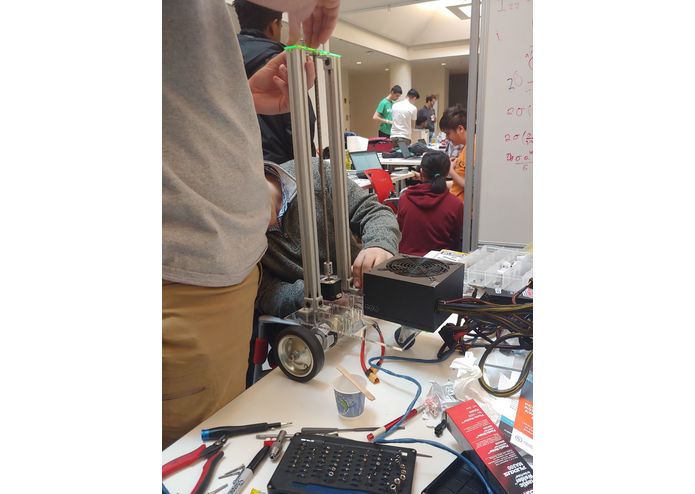
Alignment of the rails.
-
End effector being trained on picture dataset.


Inspiration
Cryptocurrency mining is expensive. So why not steal other people's power to make some money.
What it does
We built an acrylic robot that uses OpenCV on a Raspberry Pi to look for power outlets, plugs itself in, begins money making and runs away when it detects an intruder!
How I built it
The robot was built on a laser cut frame which is powered by two Harbor Freight Drill motors, a custom H-Bridge, and stepper motor system. Mounted on top of this is fully fledged Bitcoin Mining rig powered by a overclocked graphics card
Challenges I ran into
A major challenge was that the we had to make a custom H-Bridge circuit for driving our motors as the ones we bought were not rated for the 30amps the drill motors draw. Another major hurdle was machining adapters for the drill motors as they were M10x1 thread and need to adapt to 1/4-20 thread which was our wheel. Shoutout to the guys at MITERS for their help with machining!
Accomplishments that I'm proud of
Making a awesome robot that used parts locally sourced from Boston such as Altec Plastics, MITERs, and the MakeHarvard Machine shop.
What I learned
We learned that build ridiculous projects is really fun and rewarding!
What's next for Bit Bandit
We plan to be finding an outlet near you and begin mining!
Built With
- arduino
- golang
- lasercutting
- opencv
- raspberry-pi

Log in or sign up for Devpost to join the conversation.