
When I was in my second year of college I met with an accident and unfortunately broke my leg. I had a lot of difficulty walking and I was sent to a rehabilitation center to see how people without legs cope with this situation. Seeing the situation of these amputees I felt that as an engineering student I can contribute something to this cause.During the hackathon, I thought of making a powered prosthetic leg to help amputees around the world so they feel like they have a natural limb. I thought of using machine learning techniques to improve the efficiency of the model and make it more adaptive.
What it does
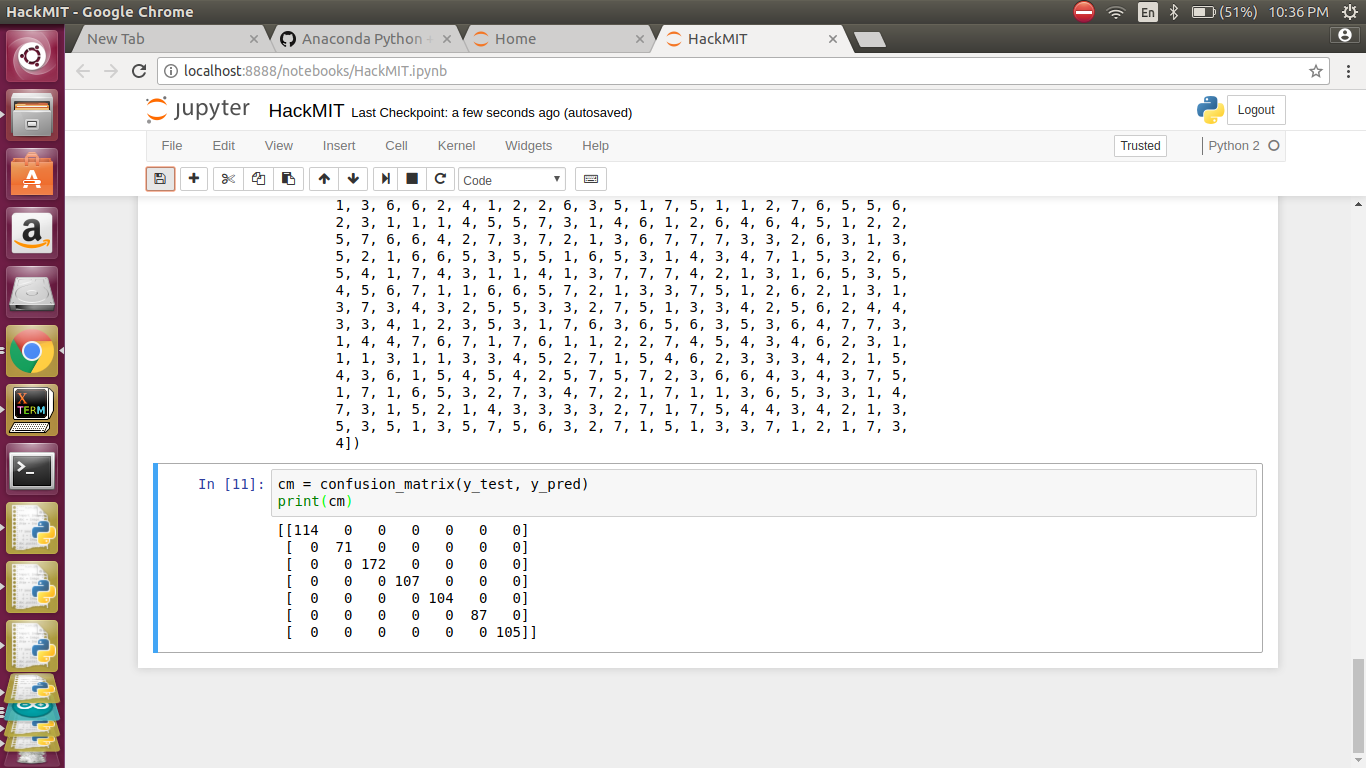
We thought of using machine learning to learn the walking pattern of an individual. We first used myoelectric sensors on the leg to get datasets. We then used Random Forest ML algorithm to train our Arduino microcontroller. We further used various adaptive techniques to make the system more efficient. We also designed the prosthetic leg and stimulated its working.
How we built it
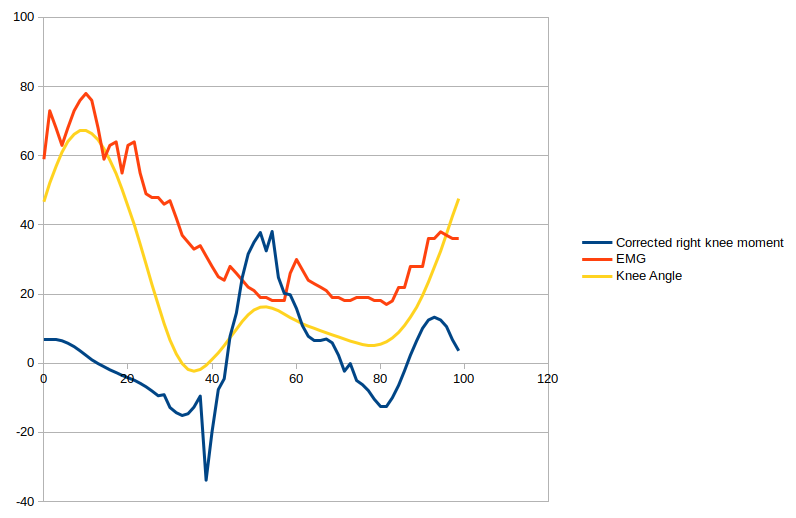
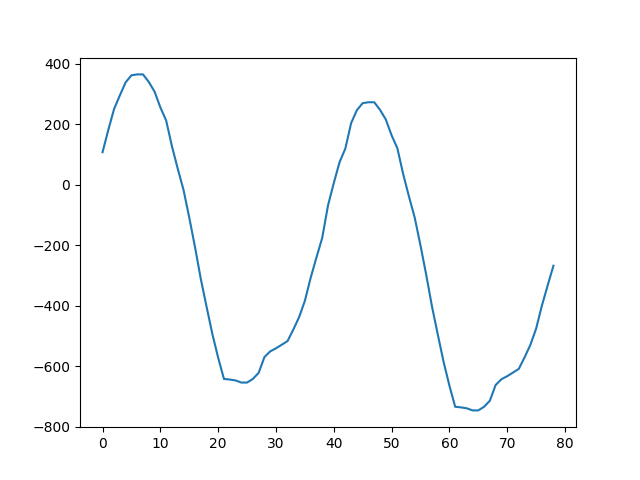
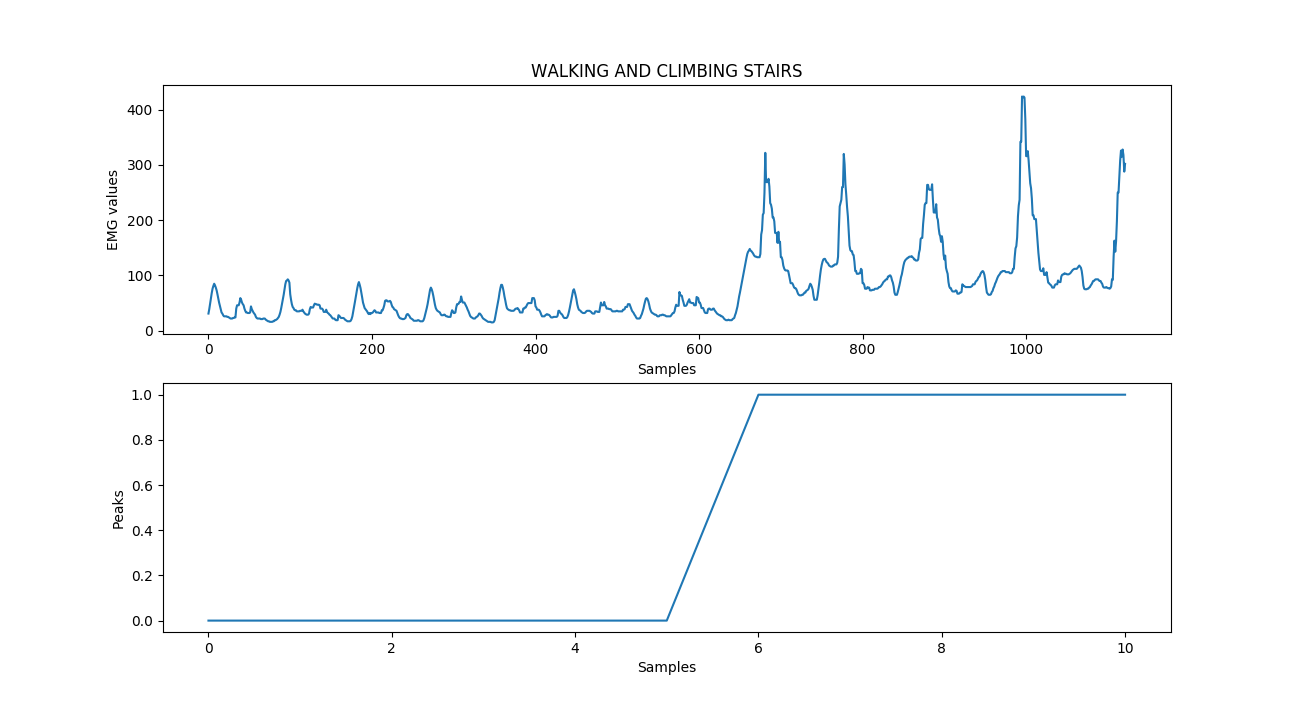
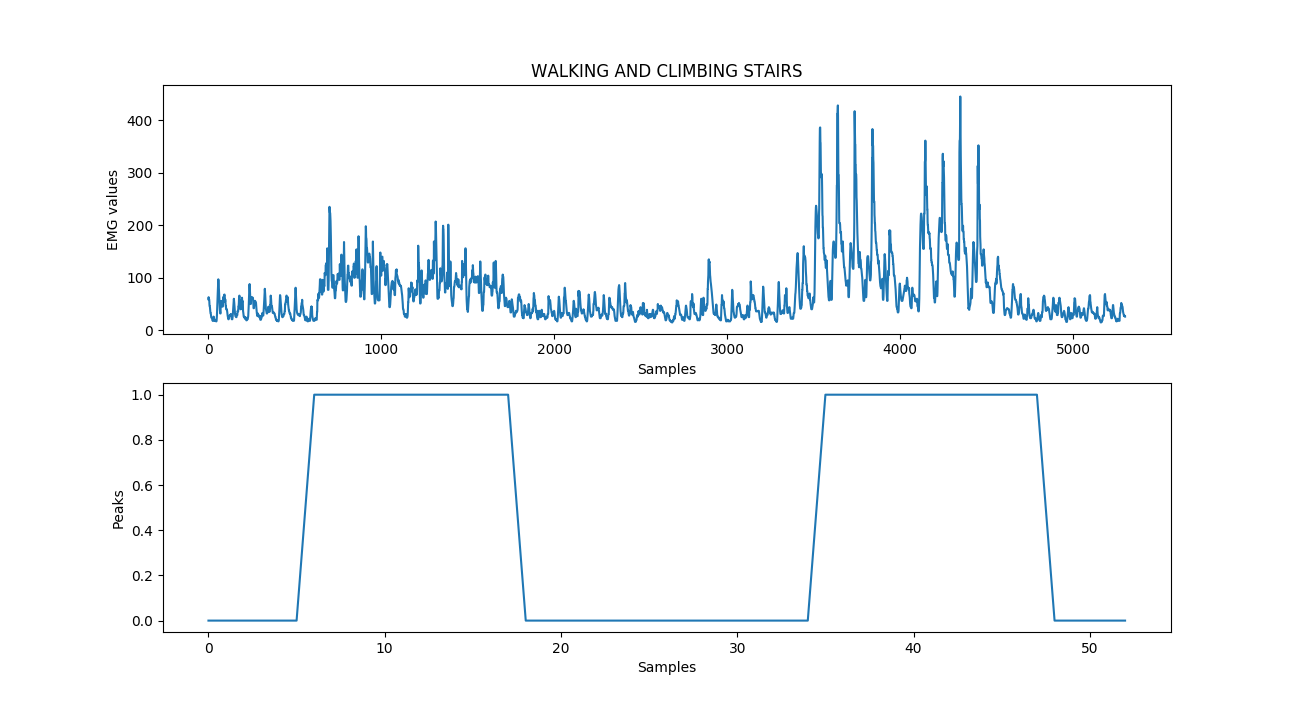
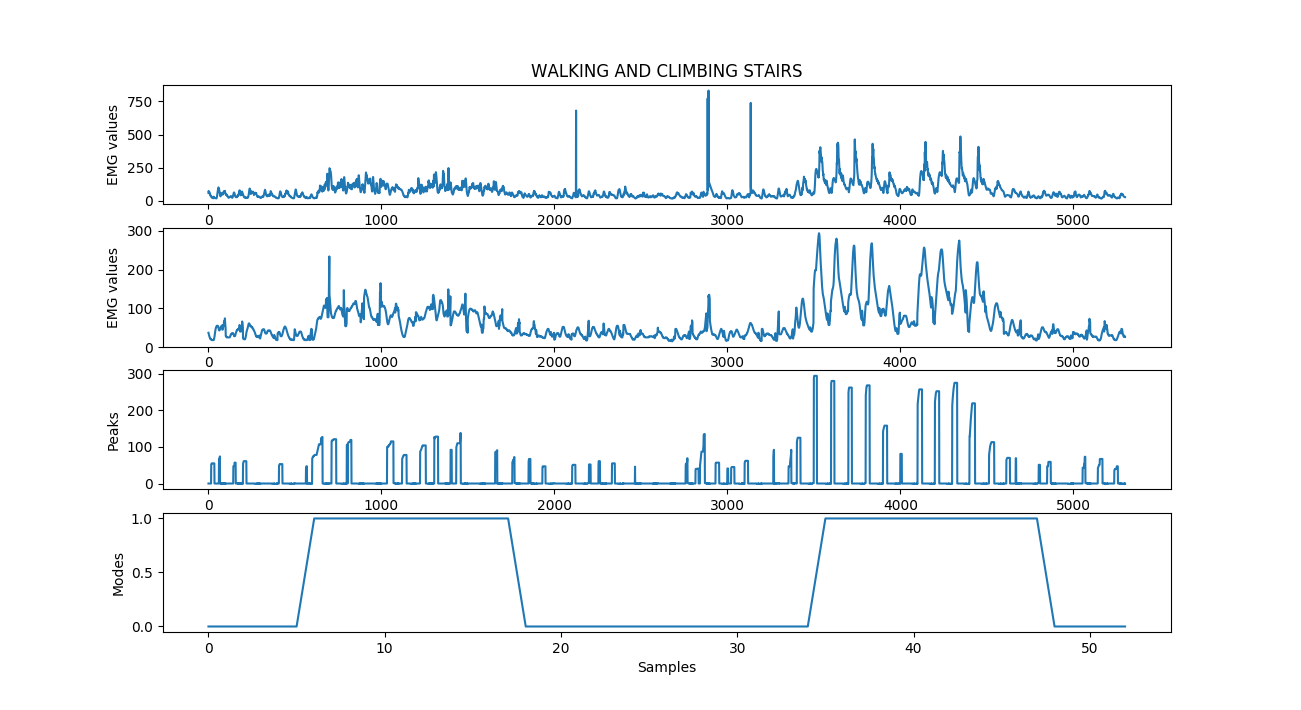
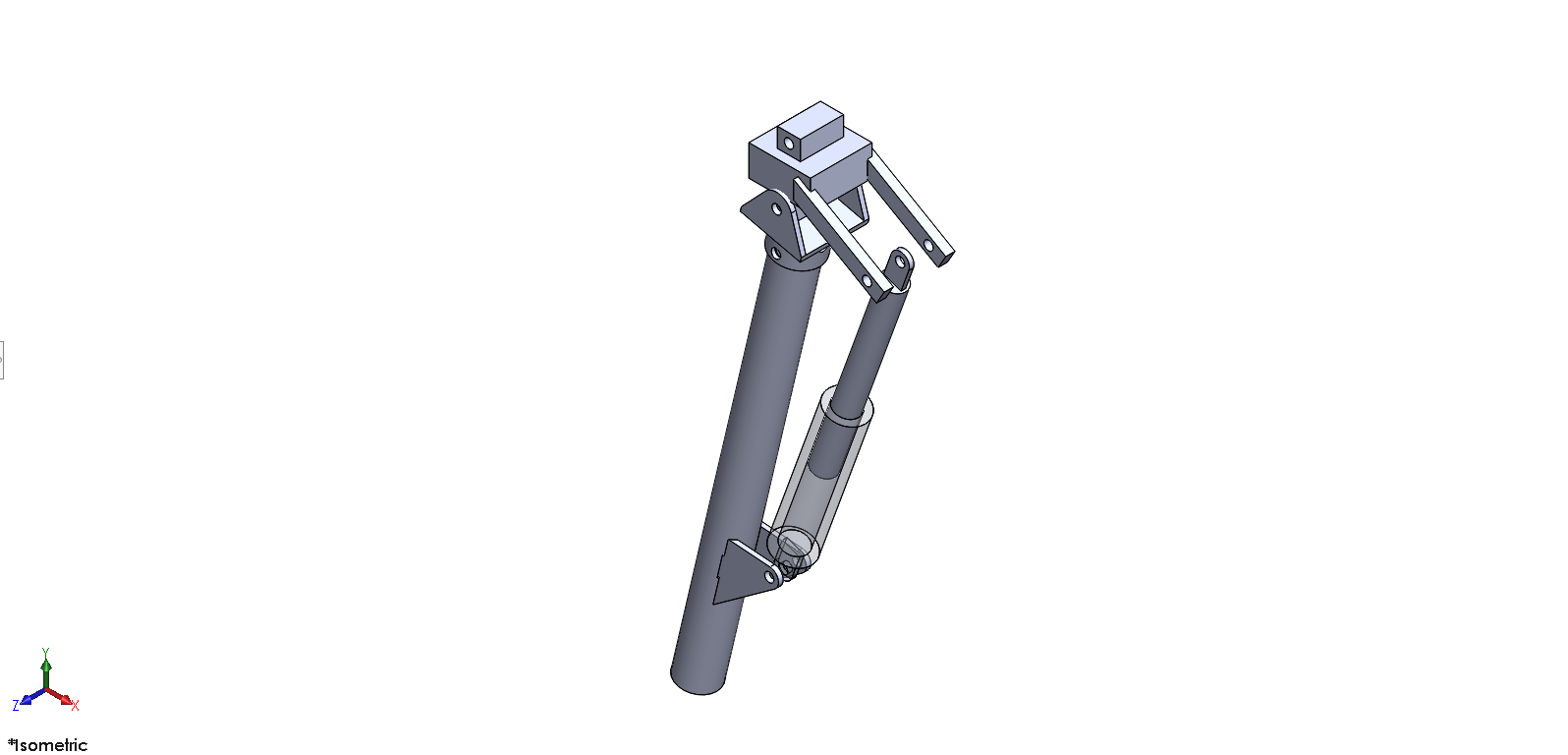
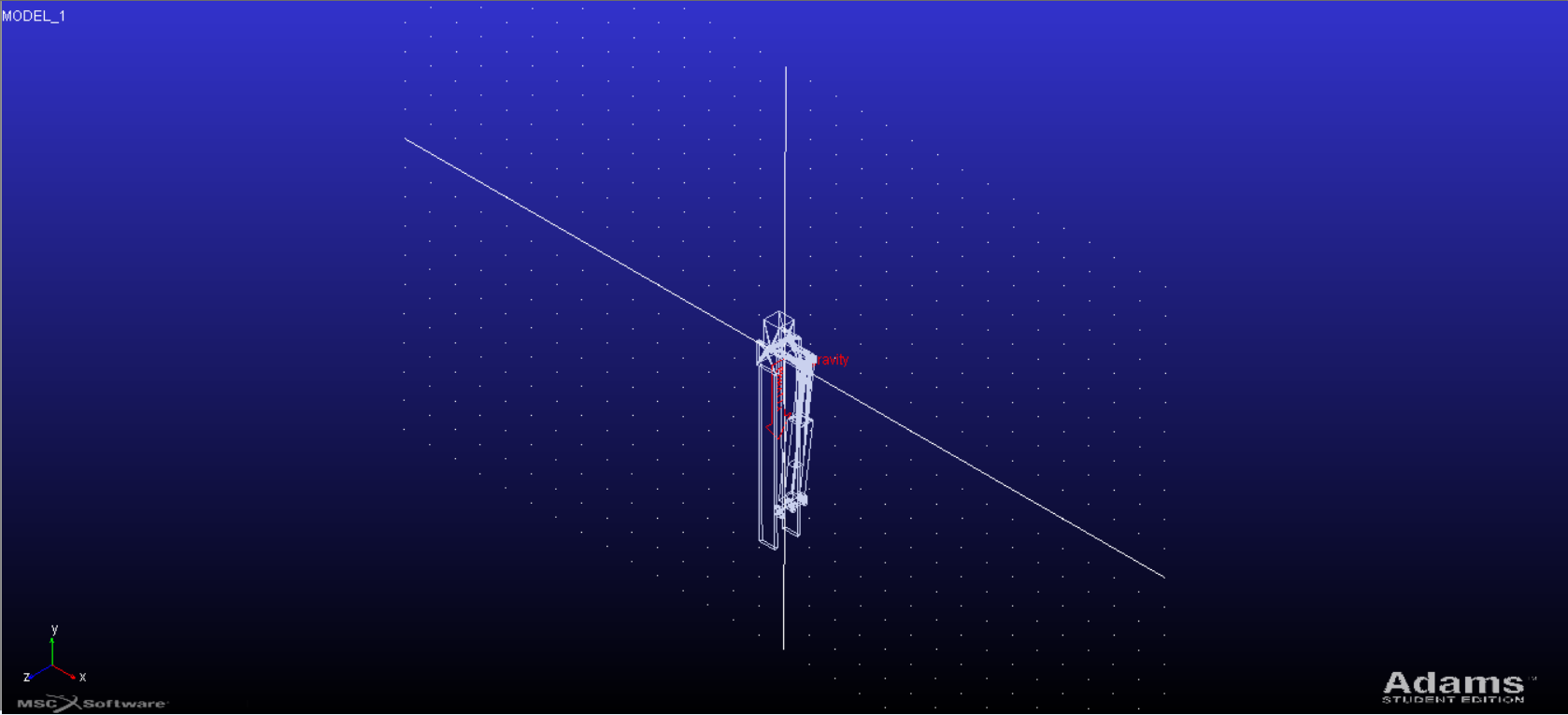
We used sensor inputs from IMUs, piezo and EMG sensors and fed this input to a Machine learning algorithm from a microcontroller. The ML model classifies the current phase of walking cycle(gait phase) and initiates control to the actuator for the next gait phase. We are also using adaptive algorithms to make the model adapt to change in speed of walking or change in motion(walking, climbing, running) and to sudden falls or jerks during motion. We have created a design for the leg and have simulated the leg with real-time data. We have implemented all the abovesaid algorithms on the data we acquired from sensors.
Challenges we ran into
The prosthetic leg was- Unable to adapt to change in speed Unable to adjust to sudden jerks or movements Unable to distinguish between different types of movement like walking, climbing etc. Prosthetic doesn’t adjust to the individual's movement pattern, in fact, it is the other way round
Accomplishments that we're proud of
We got real-time walking data for the model from a hackMIT volunteer's leg. (We thank Jessica for helping us out) We have successfully implemented the machine learning and adaptive algorithms. We also simulated a model of the leg for inputs we acquired from sensors.
What we learned
We learned a lot about machine learning and its application in prosthetic legs
What's next for Bionic Leg
Manufacturing the leg Integrating sensors Initial Prototyping Testing using pilots Pilot specific optimisation Final prototype Product Market launch



Log in or sign up for Devpost to join the conversation.